1. Ouvrez le belvédère pour construire le modèle
gazeboCliquez sur "Modifier" dans le coin supérieur gauche de l'interface du belvédère --> "Éditeur de bâtiment" pour accéder à l'interface de construction du modèle illustrée dans la figure ci-dessous. Vous pouvez utiliser les matériaux sur la gauche pour construire vous-même le modèle.

Cliquez sur un objet tel qu'un mur, faites un clic droit et cliquez sur le bouton "Ouvrir l'inspecteur de mur" , et une interface où vous pouvez ajuster les paramètres du modèle apparaîtra comme suit : Ajustez la longueur, la largeur, la hauteur et le matériau du mur selon vos besoins :

Une fois le modèle construit, cliquez sur "Fichier" dans le coin supérieur gauche --> "Enregistrer sous" et l'interface suivante apparaîtra. Nommez votre modèle et enregistrez-le. Puis ctrl+C pour fermer le belvédère.

2. Générez le fichier .world
Réouverture du belvédère dans l'aérogare
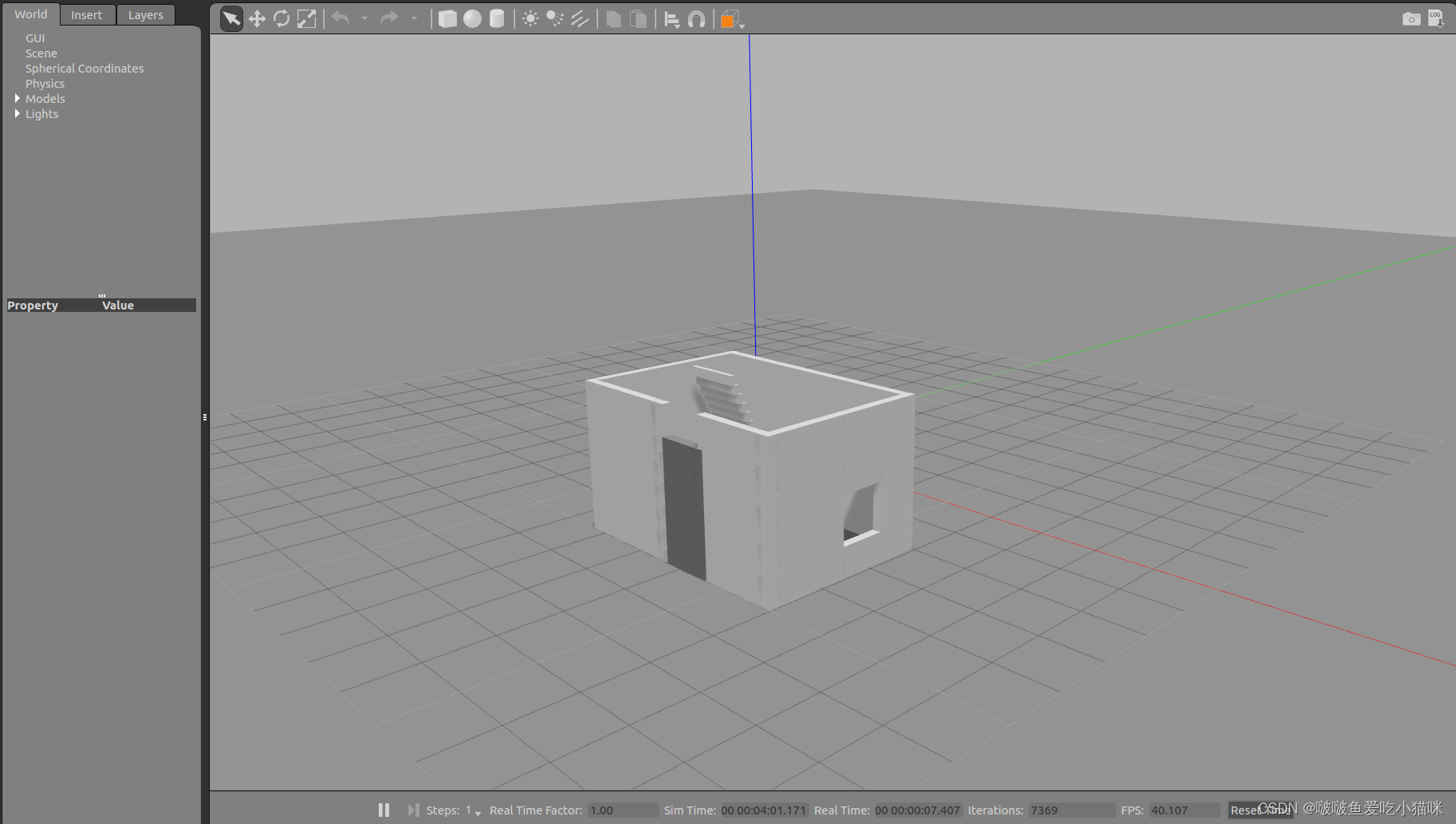
gazeboCliquez sur "Insérer" dans le coin supérieur gauche --> trouvez le chemin du modèle que vous venez d'enregistrer. Par exemple, le nom de mon modèle est myhome. Cliquez sur le nom du modèle et faites-le glisser vers le gazebo vide, et le modèle que vous venez de construit sera automatiquement généré dans le belvédère. C'est votre monde.

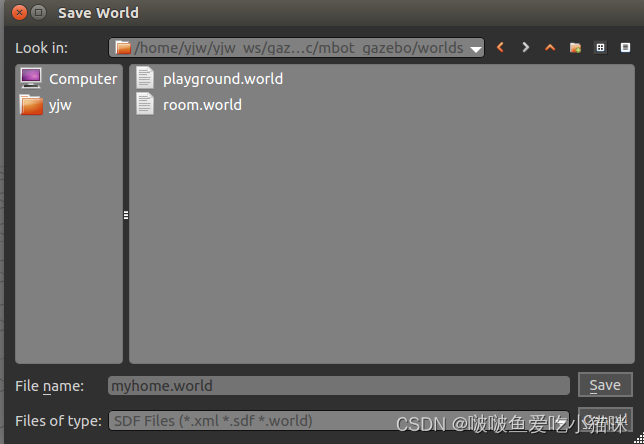
Cliquez ensuite sur "Fichier" dans le coin supérieur gauche -> "Enregistrer le monde sous" et l'interface suivante apparaît, trouvez votre propre package de fonction/src et enregistrez-le sous le fichier du monde que vous avez créé. Notez que lorsque vous nommez votre monde ici, vous devez ajouter le suffixe .world, qui est la colonne du nom du fichier, sinon vous obtiendrez une erreur.
Fermez ensuite le belvédère dans le terminal Ctrl+C.
3. Écrivez le fichier de lancement pour afficher le modèle dans le belvédère
Créez un dossier de lancement sous la fonction package/src, créez un fichier my_home.launch et écrivez le code suivant dans le fichier de lancement
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find mbot_gazebo)/worlds/myhome.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
</launch>
Ici, vous devez remplacer mbot_gazebo sur la troisième ligne par le nom de votre propre package de fonctions et modifier myhome.world sur la troisième ligne par le nom du fichier .world que vous venez d'enregistrer.
Compilez le fichier et entrez dans le terminal courant
catkin_makeDans un autre type de terminal :
source ./devel/setup.bash
roslaunch mbot_gazebo my_home.launchIci, vous devez remplacer my_home.launch par votre propre nom de fichier .launch
Cela ouvrira automatiquement le belvédère et affichera le modèle que vous venez de construire.