Pour la méthode et les étapes de création d'ubuntu16.04 pour installer le disque U, veuillez vous référer à mon blog précédent:
https://blog.csdn.net/neptune4751/article/details/79146885
L'installation du système peut faire référence à:
https://www.cnblogs.com/masbay/p/10745170.html
Ajoutez le type et la taille de partition que le blogueur n'a pas mentionnés:
1./boot: partition principale, taille 200M, format: ext4
2. /: Taille de la partition principale Format 80G: ext4
3. swap espace de swap taille de la partition logique 2 fois la taille de la mémoire, j'ai mis 16G
4. La taille restante de la partition logique / home lui est allouée. Le format est ext4 et la taille totale est de 120 Go.
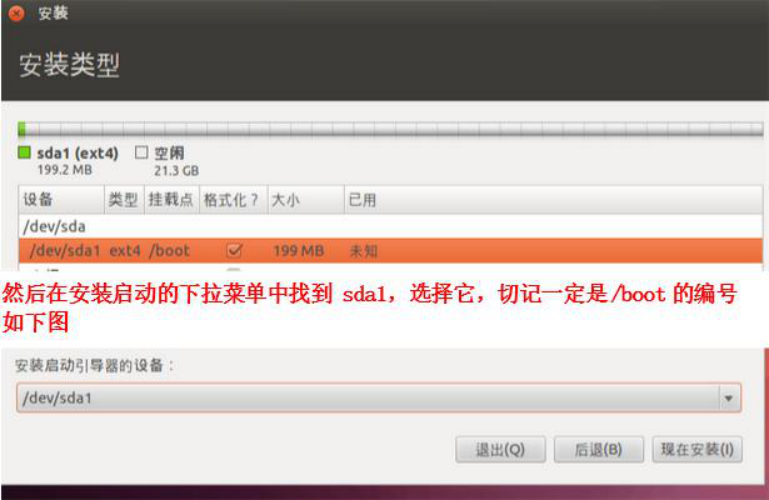
De plus, le blogueur utilise Thinkstation, la première installation entre toujours automatiquement win10, ne peut pas entrer ubuntu, vous devez utiliser F12 pour entrer dans l'interface bios. Une fois l'installation réussie, vous pouvez choisir d'entrer win10 ou ubuntu sur l'interface principale. Au moment du succès, le périphérique de chargeur de démarrage installé n'était pas sélectionné dans le numéro / boot, comme indiqué dans la figure ci-dessous, et installé selon les options par défaut.
Ensuite, installez les bibliothèques nécessaires au fonctionnement de Visual SLAM, y compris ROS, Eigen, Sophus, OpenCV3 + contrib, bibliothèque de nuages de points PCL, Pangolin, Octomap
1. L'installation de ROS peut faire référence à mon blog précédent:
https://blog.csdn.net/neptune4751/article/details/103150788
Il est à noter que: lors de l'exécution de l'instruction "sudo rosdep init", une erreur: "impossible de télécharger la liste des sources par défaut à partir de:"
Je pense que github a récemment des limites de vitesse et que le téléchargement des ressources est très lent. La solution peut être référencée sur: https://blog.csdn.net/nanianwochengshui/article/details/105702188
2. Installation propre:
La version d'installation du blogueur est Eigen 3.3.7. Une chose à rappeler est que vous devez installer ceres plus tard. Comme la version Eigen sera compilée lors de la compilation de ceres, la séquence d'installation doit d'abord installer Eigen 3.3.7, puis installer ceres 1.14.0.
Si vous utilisez " sudo apt-get install libeigen3-dev: la version 3.2 de eigen est installée , ce qui ne peut pas correspondre à la version de sophus et Ceres à installer ultérieurement
La bonne méthode:
(1) Téléchargez le package d'installation sur le site officiel ( http://eigen.tuxfamily.org/index.php?title=Main_Page ): eigen-3.3.7.tar.bz2, puis extrayez-le ici
(2) Entrez Dossier eigen-3.3.7, clic droit pour l'ouvrir dans le terminal.
(3) Installer
1.mkdir build
2.cd build
3.cmake ..
4.sodu make installParce que j'obtiens une erreur lorsque j'exécute VINS-MONO plus tard:

Ajustez enfin l'ordre d'installation: installez d'abord Eigen3.3.7, puis installez ceres, le problème est résolu.
Les étapes d'installation spécifiques d'Eigen se réfèrent à:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
3. Installation de Ceres, vous pouvez vous référer à:
http://ceres-solver.org/installation.html
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
4. Installation de la contribution OpenCV3 +
Il y aura une erreur lors de la compilation: opencv_contrib ne dispose pas de boostdesc_bgm.i et d'autres fichiers
Message d'erreur: ~ / opencv_contrib / modules / xfeatures2d / src / boostdesc.cpp: 673: 20: erreur fatale: boostdesc_bgm.i: aucun répertoire de tel fichier
À ce stade, si vous vérifiez le CMakeDownloadLog.txt dans le dossier de construction, vous constaterez que boostdesc_bgm.i est manquant et le téléchargez à son adresse désignée.
boostdesc_bgm.i
boostdesc_bgm_bi.i
boostdesc_bgm_hd.i
boostdesc_lbgm.i
boostdesc_binboost_064.i
boostdesc_binboost_128.i
boostdesc_binboost_256.i
vgg_generated_120gg.i
vgg_generated_64.i
vgg_generated_120.i
vgg_generated_64.
Lien cloud Baidu: https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA
Code d'extraction: e1wc
Mettez-le dans le chemin opencv_contrib-3.3.1 / modules / xfeatures2d / src / et recompilez;
5. L'installation de la bibliothèque de nuages de points PCL, Pangolin, Octomap, peut se référer au lien ci-dessous:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k