1.Miembros

Se pueden dividir a grandes rasgos en miembros principales, miembros senior y miembros de desarrollo.
2. Clasificación
Las principales plataformas AUTOSAR actuales se dividen en dos categorías: plataforma clásica (plataforma tradicional CP) y plataforma adaptativa (plataforma adaptativa AP).
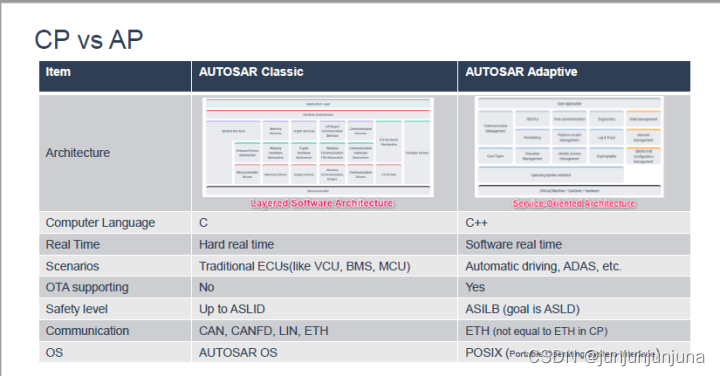
CP es relativamente maduro y ampliamente utilizado, por lo que hablaré principalmente de CP.
3.¿Qué es AUTOSAR?
AUTOSAR es la abreviatura de AUTOmotive Open System ARchitecture, y la traducción al chino es arquitectura de sistema abierto automotriz.
En pocas palabras: convierta el software subyacente de la unidad de control electrónico del automóvil en un paquete estándar, de modo que todos puedan compartir un conjunto de software subyacente y solo necesiten modificar algunas configuraciones para que coincidan con diferentes hardware. También puede combinar diferentes software de capa de aplicación. De esta manera, los desarrolladores solo necesitan desarrollar la capa de aplicación y la capa inferior queda en manos de los ingenieros de AutoSAR.
4.El papel de AutoSAR
Antes de usar AutoSAR, generalmente escribíamos código a mano. Las deficiencias de estos códigos son obvias y el acoplamiento entre software y hardware es grave. Las desventajas son las siguientes: 1. Baja eficiencia de desarrollo y ciclo de desarrollo largo
2.
Mantenimiento del código difícil y iteración
3. Baja tasa de reutilización
4. A medida que aumenta la cantidad de código, la calidad del código disminuye.
Después de usar AutoSAR, las ventajas son las siguientes:
1. Acortar el ciclo de desarrollo y mejorar la eficiencia del desarrollo
2. Aumentar considerablemente la tasa de reutilización del código
3. Hacer que sea fácil y viable para varias personas mantener la misma versión del código
4. Y el El uso de herramientas de configuración también mejora la calidad del código.
5.Arquitectura Autosar

1. Microcontrolador: hardware controlador.
2. Capa de software básica (BSW): capa de software básica, que incluye las siguientes cuatro partes:
2.1 Capa de abstracción del microcontrolador (MCAL): es el software del controlador directamente relacionado con el hardware, como la memoria, los registros de comunicación, las operaciones del puerto IO, etc. .
2.2 Capa de abstracción de ECU (ECUAL): Unifica las funciones e interfaces básicas del controlador, como análisis de contenido de mensajes CAN, reenvío de mensajes de puerta de enlace, control de procesos de lectura y escritura de memoria, etc.
2.3 Capa de servicios: proporciona varios servicios en segundo plano para la capa de aplicación, como administración de red, administración de memoria, servicios de administración de comunicación de bus y sistema operativo.
2.4 Controladores de dispositivos complejos (CDD): Brinda a los usuarios la posibilidad de escribir software de controlador de dispositivo especial por sí mismos.
3. Entorno de tiempo de ejecución (RTE): es el núcleo de AUTOSAR, separa la capa de software de aplicación de la capa de software básica y proporciona un entorno de ejecución para el software de la capa de aplicación, como la programación de intervalos de tiempo de proceso, los módulos de la capa de aplicación y las aplicaciones. Intercambio de datos entre la capa y la capa de software básica, etc.
4. Capa de software de aplicación (ASW): software que implementa funciones de aplicación específicas. Puede contener múltiples componentes de software (Componente de software, SWC).
6. Introducción a la cadena de herramientas.
Hay dos escuelas principales en China
: MATLAB+DaVinci y MATLAB+ETAS.
7.Objetivos de AutoSAR
Establezca un conjunto perfecto de códigos de software subyacentes para cumplir con los requisitos de los principales fabricantes de equipos originales, promoviendo así el desarrollo de la industria automotriz.