río C y D
Prólogo: El controlador CAN está dirigido al controlador CAN dentro del microcontrolador y puede lograr las siguientes funciones:
Inicialice el controlador CAN;
Enviar y recibir mensajes;
Notificar los datos y funciones del mensaje (instrucciones para recibir mensajes, confirmación de envío de mensajes);
Manejo de desbordamientos y errores;
Detección de estela.
Además, el controlador CAN también tiene las siguientes características: canales CAN únicos o múltiples, múltiples instancias del controlador CAN y modo de interrupción/sondeo para recibir mensajes.
El controlador CAN es parte de MCAL y puede realizar acceso al hardware y proporcionar API independientes del hardware a la capa superior. La única capa superior que puede acceder al controlador CAN es la interfaz CAN. El controlador CAN también puede proporcionar servicios para funciones de devolución de llamada para la inicialización de la transmisión de datos y la notificación de eventos de recepción. Este servicio también es independiente del hardware. Además, el controlador CAN también puede controlar el comportamiento y el estado del controlador CAN que pertenece a la misma unidad de hardware CAN.
En la herramienta EB tresos studio (en adelante, EB), tome el proyecto "simple_demo_can_rte" como ejemplo. El modelo de MCU utilizado en este proyecto es S32K144 (pin100). El proyecto abre la página debajo de la herramienta EB como se muestra en la Figura 1, y configura la configuración del controlador CAN de AUTOSAR MCAL. Incluye contenido relacionado con el módulo CAN, PORT y MCU.

Figura 1: Descripción general del Proyecto EB
1. Configuración del módulo P ORT C AN
1. 1 CONTENEDOR DE PUERTO CAN
Como se muestra en la ventana de esquema en la esquina inferior izquierda de la Figura 2, hay dos elementos, PortNumberOfPortPins y PortPin, en la instancia de PortContainer PortContainer_0. El primero es el número de PortPin y el segundo es el elemento de configuración específico del puerto.

Figura 2: Configuración de PortPin
1.2 Configuración del puerto CAN _
Si agrega la configuración CAN0, en la Figura 2, agregue 2 a PortNumberOfPortPins en el cuadro rojo 1 y haga clic para agregar una instancia de configuración de puerto en el cuadro rojo 2. Haga doble clic para abrir una nueva instancia. Generalmente, debe configurar las siguientes cuatro marcas de cuadro rojo, entre las cuales
El valor de PortPin Pcr es el número MSCR del pin que estás utilizando actualmente, puedes consultarlo en el manual de usuario adjunto del chip (Figura 4). Cada pin tiene un valor correspondiente. Después de seleccionar el valor de PCR correcto, aparecerá la opción correspondiente en la enumeración del Modo PortPin. La Figura 4 muestra la configuración del pin CAN0_TX y CAN0_RX está configurado de acuerdo con la misma lógica.

Figura 3: Configuración de PortPin CAN

Figura 4: Tabla de señales IO
2. Configurar el módulo CAN

Figura 5: Configuración del controlador CAN
2.1 Agregar instancia de controlador CAN
Haga clic en CanConfigSet->CanController en la ventana de esquema que se muestra en la Figura 5. En la ventana principal como se muestra en la figura, haga clic en el signo más señalado por la flecha para agregar una instancia del controlador. Haga doble clic en la instancia para ingresar a la página de configuración.

Figura 6: Configuración del controlador CAN página 1

Figura 7: Configuración del controlador CAN página 2
2.2 Elementos de configuración general
Como se muestra en la Figura 6, los elementos principales que deben configurarse incluyen la selección del canal CAN del hardware, la selección del modo de trabajo de recepción, transmisión y apagado del bus, la configuración de la velocidad de baudios CAN en el cuadro rojo 1 en la Figura 7 y la configuración del reloj CAN en el cuadro rojo 2. .
2.3 Método de configuración de velocidad en baudios

Figura 8: Configuración de velocidad de baudios CAN 1

Figura 9: Configuración de velocidad de baudios CAN 2

Figura 10: Configuración de velocidad de baudios CAN 3
Complete prop_seg, seg1, seg2 y otros valores de acuerdo con la velocidad en baudios planificada.
-
- Configuración del punto de referencia de la fuente del reloj C AN
Los elementos opcionales de la fuente de reloj CAN se seleccionan en McuClockReferenePoint del módulo MCU. La ruta y los pasos para agregar se muestran en la Figura 11. Puede seleccionar directamente la frecuencia de reloj adecuada o agregarla nuevamente. Haga clic en 2 puntos en la Figura 11 y haga doble clic para ingresar a la página que se muestra en la Figura 12. Seleccione 1 fuente de reloj y haga clic en 2 íconos para mostrar automáticamente el tamaño de la fuente de reloj.

Figura 11: Configuración del reloj CAN 1

Figura 12: Configuración del reloj CAN 2
-
- Instancia de configuración de referencia
Una vez completada la configuración anterior, regrese a la configuración del controlador CAN, haga clic en el icono que se muestra con la flecha en la Figura 13 y haga clic en la herramienta Listar nodos referenciables para enumerar las opciones, simplemente seleccione las que necesita.

Figura 13: Menú de funciones de iconos a la izquierda
-
- configuración del buzón de correo
Agregue una instancia de buzón como se muestra en la Figura 14 y haga doble clic para ingresar a la página de configuración como se muestra en la Figura 15. Los elementos de configuración generalmente requeridos se muestran en el cuadro rojo de la figura, incluidas las configuraciones de recepción, envío y filtrado CANID. La configuración del controlador CAN es la misma que se muestra en la Figura 13. Índice de la configuración del controlador CAN adecuada.

Figura 14: Ruta de configuración del buzón
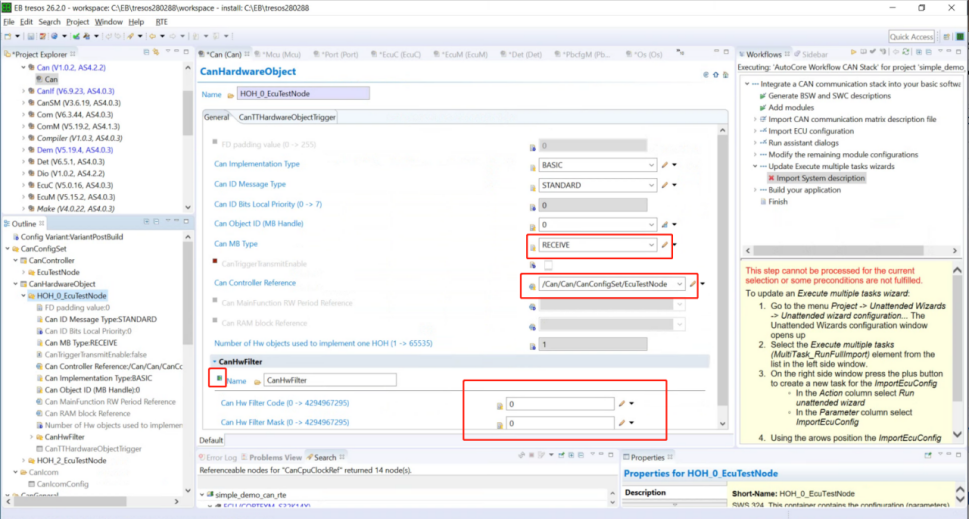
Figura 15: configuración del buzón