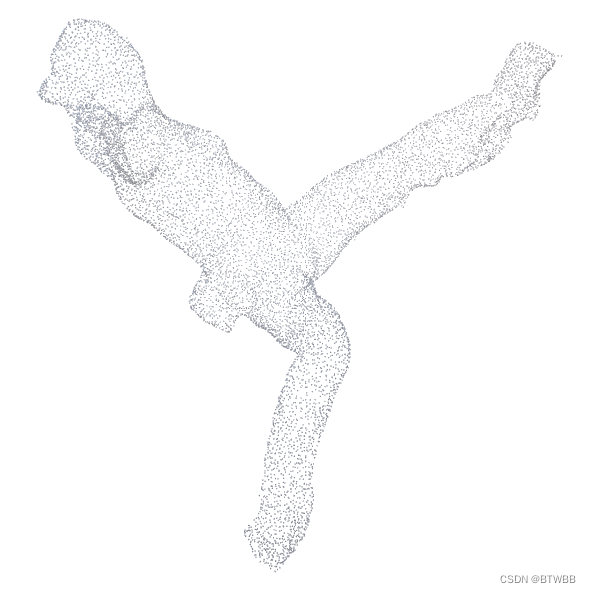
¡Este artículo implementa principalmente la voxelización de un modelo de malla para lograr efectos de voxelización de diferentes resoluciones y lo genera visualmente como un archivo obj! Primero, se usa trimesh para muestrear la malla y luego se obtiene el valor de ocupación de cada punto de vóxel en función de los puntos de muestreo.
Efecto
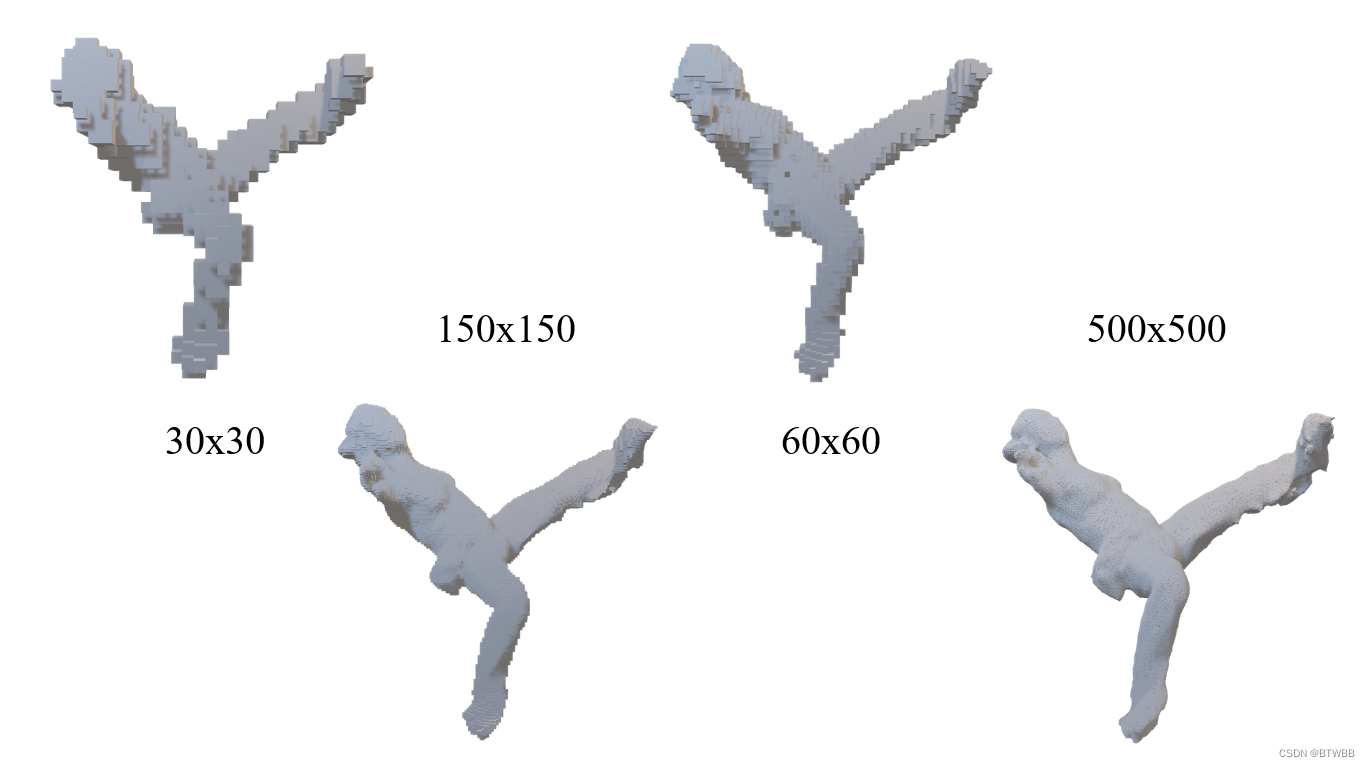
Al ajustar la resolución y la frecuencia de muestreo (cuando la resolución aumenta, se recomienda aumentar la frecuencia de muestreo de manera adecuada) para obtener los siguientes efectos.
código
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@author: Matthieu Zins
"""
import trimesh
import numpy as np
import os
import argparse
"""
====== Voxelize the surface of a mesh ======
"""
def create_if_needed(folder):
if not os.path.isdir(folder):
os.mkdir(folder)
parser = argparse.ArgumentParser(description='Pass object name')
parser.add_argument('input_mesh', type=str)
parser.add_argument('--output_folder', type=str, default="")
parser.add_argument('--resolution', type=int, nargs=3, default=[50, 50, 50],
help="resolution_X resolution_Y resolution_Z")
parser.add_argument('--sampling', type=int, default="100000",
help="number of points sampled on the mesh")
args = parser.parse_args()
input_mesh_filename = args.input_mesh
object_name = os.path.splitext(os.path.basename(input_mesh_filename))[0]
output_folder = args.output_folder
if len(output_folder) == 0: output_folder = object_name
RES_X, RES_Y, RES_Z = args.resolution
sample_points_count = args.sampling
create_if_needed(output_folder)
mesh = trimesh.exchange.load.load(input_mesh_filename)
# Uniform Points Sampling
pts, _ = trimesh.sample.sample_surface_even(mesh, sample_points_count )
# Save sample points
sampled_points_mesh = trimesh.Trimesh(vertices=pts)
sampled_points_mesh.export(os.path.join(output_folder, object_name + "_resampled_points.ply"))
# Adjust the grid origin and voxels size
origin = pts.min(axis=0)
dimensions = pts.max(axis=0) - pts.min(axis=0)
scales = np.divide(dimensions, np.array([RES_X-1, RES_Y-1, RES_Z-1]))
scale = np.max(scales)
# Voxelize
pts -= origin
pts /= scale
pts_int = np.round(pts).astype(int)
grid = np.zeros((RES_X, RES_Y, RES_Z), dtype=int)
gooRES_X = np.where(np.logical_and(pts_int[:, 0] >= 0, pts_int[:, 0] < RES_X))[0]
gooRES_Y = np.where(np.logical_and(pts_int[:, 1] >= 0, pts_int[:, 1] < RES_Y))[0]
gooRES_Z = np.where(np.logical_and(pts_int[:, 2] >= 0, pts_int[:, 2] < RES_Z))[0]
goods = np.intersect1d(np.intersect1d(gooRES_X, gooRES_Y), gooRES_Z)
pts_int = pts_int[goods, :]
grid[pts_int[:, 0], pts_int[:, 1], pts_int[:, 2]] = 1
# Save voxels
voxel_pts = np.array([[-0.5, 0.5, -0.5],
[0.5, 0.5, -0.5],
[0.5, 0.5, 0.5],
[-0.5, 0.5, 0.5],
[-0.5, -0.5, -0.5],
[0.5, -0.5, -0.5],
[0.5, -0.5, 0.5],
[-0.5, -0.5, 0.5]])
voxel_faces = np.array([[0, 1, 2, 3],
[1, 5, 6, 2],
[5, 4, 7, 6],
[4, 0, 3, 7],
[0, 4, 5, 1],
[7, 3, 2, 6]])
def get_voxel(i, j, k):
global voxel_pts, voxel_faces
v = np.array([i, j, k], dtype=float) * scale
v += origin
points = voxel_pts * scale + v
return points, voxel_faces.copy()
points = []
faces = []
fi = 0
for i in range(RES_X):
for j in range(RES_Y):
for k in range(RES_Z):
if grid[i, j, k]:
p, f = get_voxel(i, j, k)
points.append(p)
f += fi
faces.append(f)
fi += 8
points = np.vstack(points)
faces = np.vstack(faces)
# Write obj mesh with quad faces
with open(os.path.join(output_folder, object_name + "_voxels.obj"), "w") as fout:
for p in points:fout.write("v " + " ".join(map(str, p)) + "\n")
for f in faces+1:fout.write("f " + " ".join(map(str, f)) + "\n")
print(object_name, "done.")
Ejecutar :
Dependencias
- engordado
- corajudo
## Usage
python voxelize_surface.py example/chair.obj --output_folder output --resolution 30 30 30 --sampling 10000
Los parámetros opcionales son:
- carpeta_salida ( cadena ): carpeta donde se guarda el resultado
- resolución ( lista ): la resolución de la cuadrícula
[res_x, res_y, res_z] - muestreo ( int ): número de puntos muestreados en la superficie de la malla antes de la voxelización
- Nota : ¡El tipo de entrada puede ser formato obj, off o ply!
Nota : ¡Si ocurre la siguiente situación, se puede aumentar el número de puntos de muestreo (muestreo)! La razón de esta situación es que el intervalo de muestreo es demasiado grande y el tamaño del vóxel es demasiado pequeño (la resolución es demasiado alta), lo que provoca errores al juzgar los valores de ocupación de algunos vóxeles. ¡Así que esta situación también se puede mejorar reduciendo la resolución!
Referencia
Descargo de responsabilidad : ¡El código de este artículo no es original y proviene de Surface_Voxels de zinsmatt en GitHub! Si hay alguna infracción, ¡contáctenos para retirar el artículo!
https://github.com/zinsmatt/Surface_Voxels