1 Protocolo del puerto serie
El nombre completo del puerto serie es Receptor y Transmisor Asíncrono Universal, que se utiliza principalmente para la transmisión de datos en serie y es un modo de transmisión full-duplex. Convierte datos paralelos en datos en serie para su transmisión al enviar datos y convierte los datos en serie recibidos en datos paralelos al recibir datos.
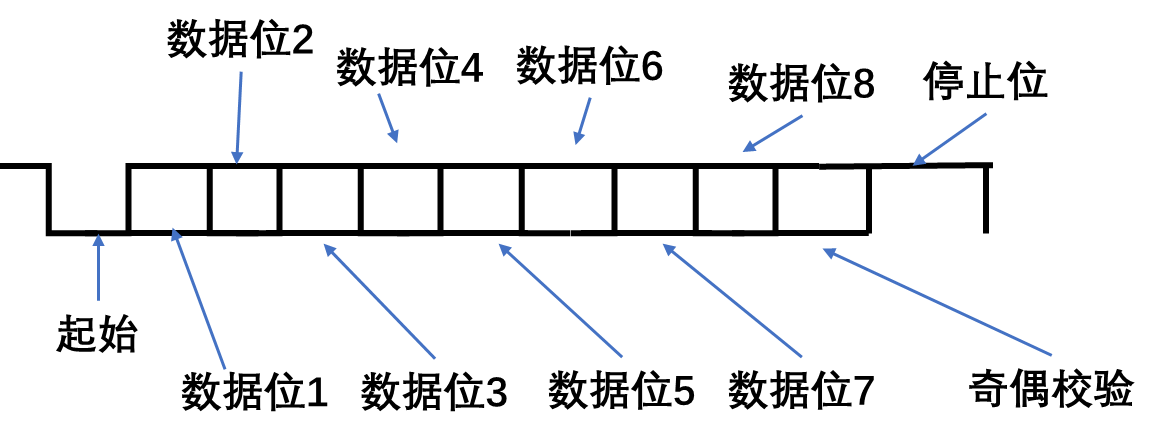
Una trama de datos durante la transmisión o recepción UART consta de 4 partes, incluidos bits de inicio, bits de datos, bits de paridad y bits de parada. El bit de inicio marca el comienzo de un cuadro de datos y el bit de parada marca el final de un cuadro de datos. Los bits de datos son datos válidos en un marco de datos y los bits de paridad se pueden dividir en paridad impar o paridad par.
Bit de inicio:
la señal de transmisión tx es baja por defecto. Cuando ocurre un flanco descendente y el nivel bajo dura un bit, se considera que se ha transmitido un bit de inicio.
Los bits de datos
son datos válidos para la transmisión y se puede seleccionar el ancho de bits de los datos, 6, 7 u 8 bits.
Dígito de control:
la exactitud de los datos transmitidos se puede comprobar hasta cierto punto.
Bit de parada:
si el nivel alto dura mucho tiempo, se considera como el final de los datos.
Como se muestra a continuación: (El ancho de bits de datos es un byte)
Velocidad de baudios
: La velocidad de baudios indica cuántos bits de datos deben transmitirse en un segundo. Por ejemplo, 9600 bps significa que deben transmitirse 9600 bits en un segundo.
Módulo de envío de 2 puertos serie
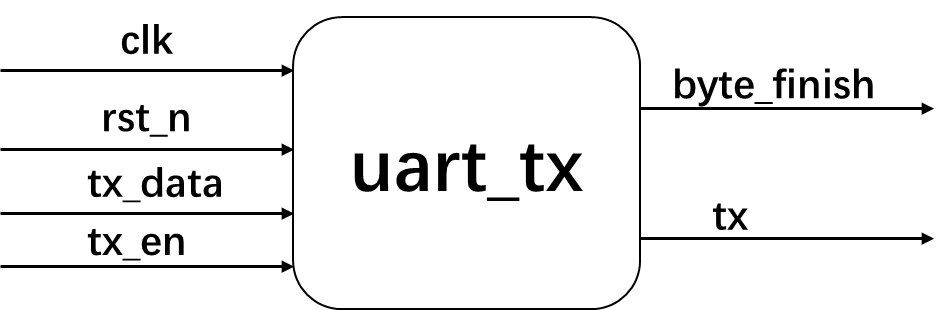
Interpretación de señales:
| clc | reloj |
|---|---|
| primero_n | reiniciar |
| datos_tx | Un byte de datos enviado |
| tx_es | La señal de habilitación para enviar datos es un pulso alto. |
| byte_finish | Transmitió exitosamente un byte de datos |
| tx | señal enviada |
La idea general del diseño La
idea general es diseñar una máquina de estados con cinco estados, estado inactivo (IDLE), estado de inicio (START), envío de datos (SEND_DATA), verificación (EVEN_ODD_CHECK) y parada (STOP).
Primero, coloque los datos globales en un archivo config.v, el código es el siguiente:
`define CLK_FRE 50_000_000 //输入的时钟频率
`define BAUD_RATE 115200 //波特率
`define EVEN_CHECK 1 //1 :偶校验 0:奇校验
El código del módulo de uart_tx es el siguiente:
`include "config.v"
module uart_tx (
input wire clk ,
input wire rst_n ,
input wire [7:0] tx_data ,
input wire tx_en ,
output wire byte_finish ,
output reg tx
);
localparam IDLE = 5'b00001 , //空闲
START = 5'b00010 , //起始
SEND_DATA = 5'b00100 , //发送数据
EVEN_OLD_CHECK = 5'b01000 , //奇偶校验
STOP = 5'b10000 ; //停止
localparam CNT_MAX = `CLK_FRE / `BAUD_RATE ;
reg [31:0] cnt ;
reg [4:0] state ;
reg [4:0] nx_state ;
reg [2:0] cnt_data ;
reg even_check ;
reg odd_check ;
wire start_finish; //起始位结束信号
wire bit_flag ; //发送每个数据的bit信号
wire byte_flag ; //成功发送一字节数据的标致
wire check_flag ; //奇偶校验的标志
wire stop_flag ; //停止位的标志
wire check ; //要发送的奇偶校验信号
assign start_finish = (state == START) && (cnt == CNT_MAX - 1) ? 1'b1 : 1'b0;
assign bit_flag = (state == SEND_DATA) && (cnt == CNT_MAX - 1) ? 1'b1 : 1'b0;
assign byte_flag = bit_flag && (cnt_data == 3'd7) ? 1'b1 : 1'b0;
assign check_flag = ((state == EVEN_OLD_CHECK) && (cnt == CNT_MAX - 1)) ? 1'b1 : 1'b0;
assign stop_flag = ((state == STOP) && (cnt == CNT_MAX - 1)) ? 1'b1 : 1'b0;
assign check = `EVEN_CHECK ? even_check : odd_check;
//状态转移(时序逻辑)
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
state <= IDLE;
end
else begin
state <= nx_state;
end
end
//状态跳转(组合逻辑)
always @(*) begin
//nx_state <= IDLE;
case(state)
IDLE: nx_state = (tx_en) ? START : IDLE;
START: nx_state = (start_finish) ? SEND_DATA : START;
SEND_DATA: nx_state = byte_flag ? EVEN_OLD_CHECK : SEND_DATA;
EVEN_OLD_CHECK: nx_state = check_flag ? STOP : EVEN_OLD_CHECK;
STOP: nx_state = stop_flag ? IDLE : STOP;
default: nx_state = IDLE;
endcase
end
//对cnt计数器赋值
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
cnt <= 'd0;
end
else begin
case(state)
IDLE: cnt <= 'd0;
START: begin
if(nx_state == START) begin
cnt <= cnt + 1'b1;
end
else if(nx_state == SEND_DATA) begin
cnt <= 'd0;
end
else begin
cnt <= cnt;
end
end
SEND_DATA:begin
if(nx_state == SEND_DATA) begin
if(bit_flag) begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else if(nx_state == EVEN_OLD_CHECK) begin
cnt <= 'd0;
end
else begin
cnt <= cnt;
end
end
EVEN_OLD_CHECK: cnt <= (nx_state == EVEN_OLD_CHECK) ? cnt + 1'b1 : (nx_state == STOP) ? 'd0 : cnt;
STOP: cnt <= (nx_state == STOP) ? cnt + 1'b1 : 1'b0;
default:cnt <= 'd0;
endcase
end
end
//统计发送的数据的bit数
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
cnt_data <= 3'd0;
end
else if((state == SEND_DATA) && (cnt_data == 3'd7) && (bit_flag)) begin
cnt_data <= 'd0;
end
else if((state == SEND_DATA) && (cnt_data < 3'd7) && (bit_flag)) begin
cnt_data <= cnt_data + 1'b1;
end
else begin
cnt_data <= cnt_data;
end
end
//生成奇校验还是偶校验
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
even_check <= 1'b0;
odd_check <= 1'b0;
end
else if(tx_en) begin
even_check <= ^tx_data;
odd_check <= ~(^tx_data);
end
else begin
even_check <= even_check;
odd_check <= odd_check;
end
end
assign byte_finish = stop_flag;
//发送数据
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
tx <= 1'b1;
end
else begin
case(nx_state)
IDLE: tx <= 1'b1;
START: tx <= 1'b0;
SEND_DATA: tx <= bit_flag ? tx_data[cnt_data+1] : tx_data[cnt_data];
EVEN_OLD_CHECK:tx <= check;
STOP: tx <= 1'b1;
default: tx <= 1'b1;
endcase
end
end
endmodule
El banco de pruebas es el siguiente:
`timescale 1ns/1ns
`define CLK_CYCLE 20
module tb_uart_tx;
reg clk ;
reg rst_n ;
reg [7:0] tx_data ;
reg tx_en ;
wire byte_finish ;
wire tx ;
uart_tx u_uart_tx(
. clk (clk),
. rst_n (rst_n),
. tx_data (tx_data),
. tx_en (tx_en),
. byte_finish (byte_finish),
. tx (tx)
);
initial begin
clk = 1'b0;
rst_n = 1'b0;
tx_data = 8'h00;
tx_en = 1'b0;
#30
rst_n = 1'b1;
#100
repeat (2) @(posedge clk);
tx_en = 1'b1;
tx_data = 8'h45;
@(posedge clk);
tx_en = 1'b0;
@(negedge byte_finish);
tx_en = 1'b1;
tx_data = 8'h23;
@(posedge clk);
tx_en = 1'b0;
@(byte_finish);
#100
$finish;
end
always #(`CLK_CYCLE / 2) clk = ~clk;
endmodule
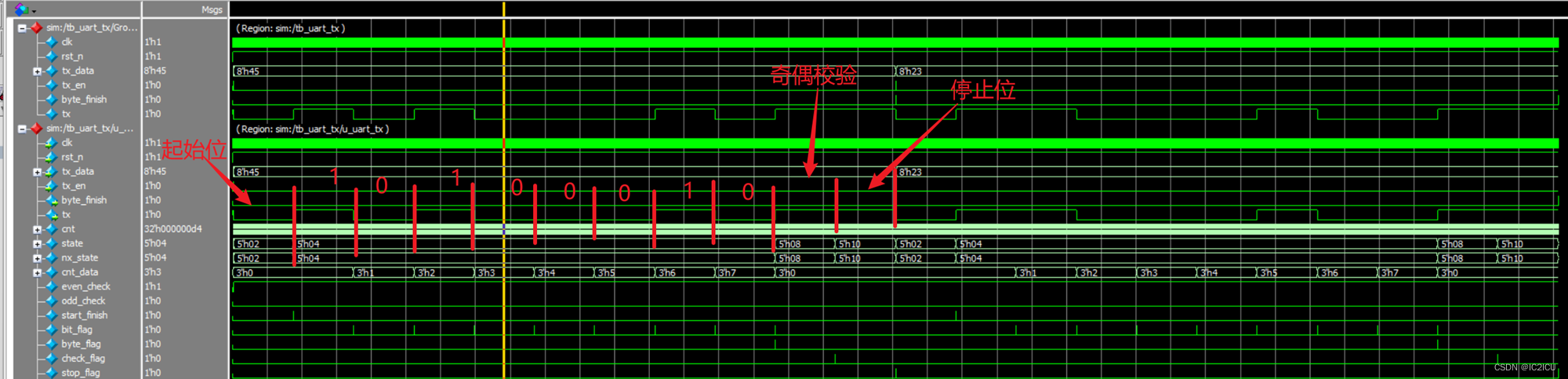
La forma de onda de simulación es la siguiente, que muestra que los datos se transmitieron exitosamente.
Módulo receptor de 3 puertos serie
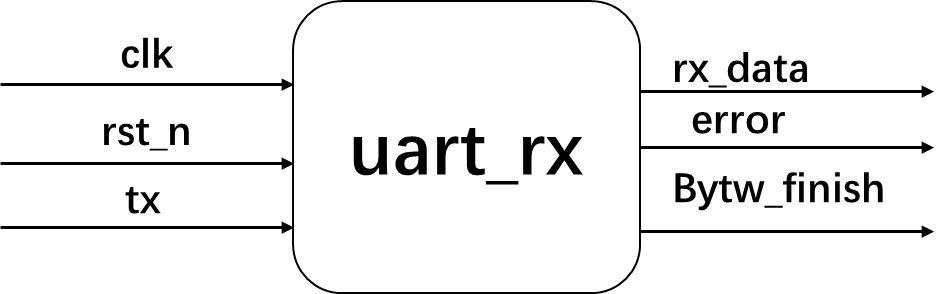
Interpretación de señales:
| clc | reloj |
|---|---|
| primero_n | reiniciar |
| tx | Señal de un solo bit recibida |
| datos_rx | Un byte de datos recibidos. |
| byte_finish | Señal de finalización de la recepción de datos de un byte. |
| error | Según la verificación de paridad, se juzga si los datos recibidos son creíbles. |
La idea general del diseño La
idea general es diseñar una máquina de estados con cinco estados, estado inactivo (IDLE), estado de inicio (START), recepción de datos (RV_DATA), verificación (CHECK) y parada (STOP). Cabe señalar que, para el muestreo de datos, se selecciona una señal de bits para ser muestreada en el medio, de modo que los datos muestreados sean más confiables.
Los módulos de uart_rx son los siguientes:
`include "config.v"
module uart_rx(
input wire clk ,
input wire rst_n ,
input wire tx ,
output wire [7:0] rx_data ,
output reg error ,
output wire byte_finish
);
localparam IDLE = 5'b00001 , //空闲
START = 5'b00010 , //开始
RV_DATA = 5'b00100 , //接收数据
CHECK = 5'b01000 , //奇偶校验
STOP = 5'b10000 ; //停止
localparam CNT_MAX = `CLK_FRE / `BAUD_RATE ;
reg tx_dly ;
reg [31:0] cnt ;
reg [4:0] state ;
reg [4:0] nx_state ;
reg [2:0] cnt_bit ;
reg [7:0] rv_data ;
reg even_check ;
reg odd_check ;
wire tx_negedge ;
wire start_end ;
wire bit_flag ;
wire rv_end ;
wire sample_flag ; //采样数据的信号
wire check ;
wire check_end ;
wire stop_end ;
assign start_end = (state == START) && (cnt == CNT_MAX - 2);
assign bit_flag = (state == RV_DATA) && (cnt == CNT_MAX - 1);
assign rv_end = (state == RV_DATA) && (bit_flag) && (cnt_bit == 3'd7);
assign sample_flag = ((state == RV_DATA) ) && (cnt == CNT_MAX / 2 - 1);
assign check = `EVEN_CHECK ? even_check : odd_check;
assign check_end = (state == CHECK) && (cnt == CNT_MAX - 1);
assign stop_end = (state == STOP) && (cnt == CNT_MAX - 1);
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
tx_dly <= 1'b1;
end
else begin
tx_dly <= tx;
end
end
assign tx_negedge = ((tx_dly) && (!tx)) ? 1'b1 : 1'b0;
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
state <= IDLE;
end
else begin
state <= nx_state;
end
end
always @(*) begin
case(state)
IDLE: nx_state = tx_negedge ? START : IDLE;
START: nx_state = start_end ? RV_DATA : START;
RV_DATA:nx_state = rv_end ? CHECK : RV_DATA;
CHECK: nx_state = check_end ? STOP : CHECK;
STOP: nx_state = stop_end ? IDLE : STOP;
default:nx_state = IDLE;
endcase
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
cnt <= 'd0;
end
else begin
case(state)
IDLE: cnt <= 'd0;
START: begin
if(nx_state == START) begin
cnt <= cnt + 1'b1;
end
else if(nx_state == RV_DATA) begin
cnt <= 'd0;
end
else begin
cnt <= cnt;
end
end
RV_DATA:begin
if(nx_state == RV_DATA) begin
if(bit_flag) begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else if(nx_state == CHECK) begin
cnt <= 'd0;
end
else begin
cnt <= cnt;
end
end
CHECK: cnt <= (nx_state == CHECK) ? cnt + 1'b1 : 'd0;
STOP : cnt <= (nx_state == STOP) ? cnt + 1'b1 : 'd0;
default:cnt <= 'd0;
endcase
end
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
cnt_bit <= 3'd0;
end
else if((bit_flag) && (nx_state == CHECK)) begin
cnt_bit <= 3'd0;
end
else if(bit_flag) begin
cnt_bit <= cnt_bit + 1'b1;
end
else begin
cnt_bit <= cnt_bit;
end
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
rv_data <= 8'h00;
end
else if(state == IDLE) begin
rv_data <= 8'h00;
end
else if(sample_flag) begin
rv_data <= {
tx, rv_data[7:1]};
end
else begin
rv_data <= rv_data;
end
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
odd_check <= 1'b0;
even_check <= 1'b0;
end
else if(nx_state == CHECK) begin
even_check <= ^rv_data;
odd_check <= ~(^rv_data);
end
else begin
even_check <= even_check;
odd_check <= odd_check;
end
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
error <= 1'b0;
end
else if(nx_state == IDLE) begin
error <= 1'b0;
end
else if(nx_state == STOP) begin
error <= 1'b0;
end
else if((nx_state == CHECK) && sample_flag) begin
error <= (tx != check) ? 1'b1 : 1'b0;
end
else begin
error <= error;
end
end
assign rx_data = rv_data;
assign byte_finish = (state == STOP) && (nx_state == IDLE);
endmodule
4 Co-simulación de módulos de envío y recepción de uart
La capa superior de uart es la siguiente:
el código del módulo uart es el siguiente, que sirve para conectar los módulos de envío y recepción
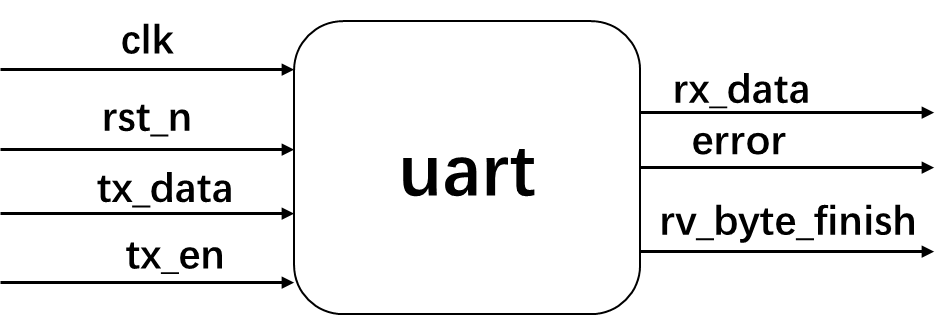
module uart(
input wire clk ,
input wire rst_n ,
input wire [7:0] tx_data ,
input wire tx_en ,
output wire [7:0] rx_data ,
output wire error ,
output wire rv_byte_finish
);
wire tx_byte_finish ;
wire tx ;
uart_tx u_uart_tx(
. clk (clk),
. rst_n (rst_n),
. tx_data (tx_data),
. tx_en (tx_en),
. byte_finish (tx_byte_finish),
. tx (tx)
);
uart_rx u_uart_rx(
. clk (clk),
. rst_n (rst_n),
. tx (tx),
. rx_data (rx_data),
. error (error),
. byte_finish (rv_byte_finish)
);
endmodule
El código de simulación es el siguiente:
`timescale 1ns/1ns
`define CLK_CYCLE 20
module tb_uart;
reg clk ;
reg rst_n ;
reg [7:0] tx_data ;
reg tx_en ;
wire [7:0] rx_data ;
wire error ;
wire rv_byte_finish;
uart u_uart(
. clk (clk),
. rst_n (rst_n),
. tx_data (tx_data),
. tx_en (tx_en),
. rx_data (rx_data),
. error (error),
. rv_byte_finish(rv_byte_finish)
);
initial begin
clk = 1'b0;
rst_n = 1'b0;
tx_data = 8'h00;
tx_en = 1'b0;
#30
rst_n = 1'b1;
#100
repeat (2) @(posedge clk);
tx_en = 1'b1;
tx_data = 8'h45;
@(posedge clk);
tx_en = 1'b0;
@(negedge rv_byte_finish);
tx_en = 1'b1;
tx_data = 8'h23;
@(posedge clk);
tx_en = 1'b0;
@(rv_byte_finish);
#100
$finish;
end
always #(`CLK_CYCLE / 2) clk = ~clk;
endmodule
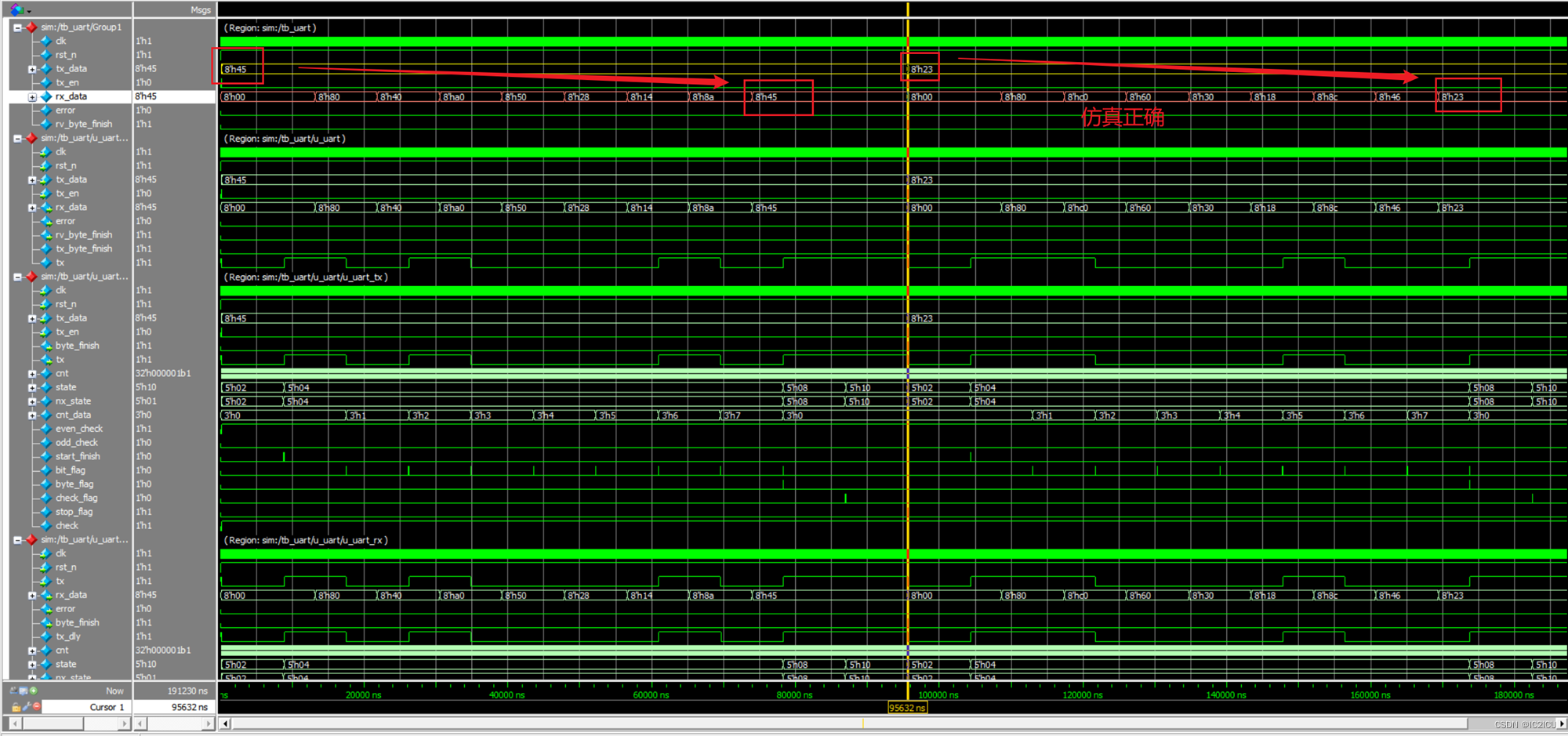
La forma de onda de simulación es la siguiente, se puede ver que los datos se recibieron con éxito.
5 resumen
Siento que tengo una mejor comprensión de la escritura y la comprensión de la máquina de estados. Hasta ahora, se han completado los tres protocolos de comunicación principales. ¡vamos vamos vamos! ! !