En los escenarios de aplicaciones interiores actuales, la mayor dificultad es que no hay infraestructura. Los escenarios de aplicaciones actuales se basan en las necesidades del usuario, o usan tecnología UWB, o usan tecnología Bluetooth, y personalizan diseños personalizados de acuerdo con diferentes entornos interiores. Red de posicionamiento, con la ayuda de etiquetas de posicionamiento UWB y etiquetas de posicionamiento Bluetooth de la misma tecnología, combinadas con mapas personalizados para interiores y algoritmos de motor de posicionamiento, y luego realizar posicionamiento en interiores, navegación, cercas electrónicas, etc. en función de posiciones interiores precisas.
Posicionamiento UWB TDOA
Posicionamiento TDoA
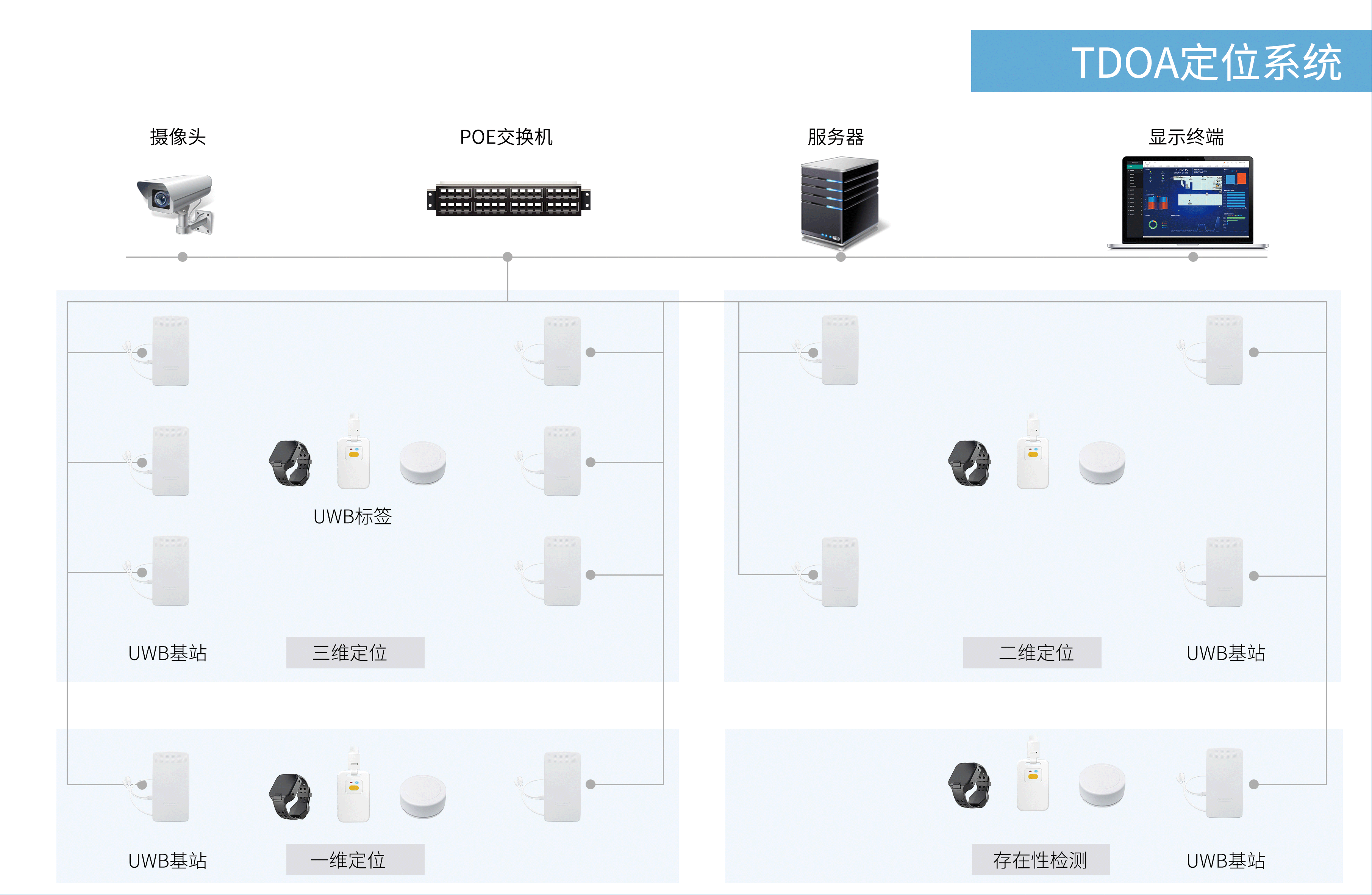
El posicionamiento en interiores de dimensión 0 se usa a menudo para la detección de presencia. El escenario de aplicación común es monitorear si hay personas en una habitación durante mucho tiempo. El hardware del sistema de posicionamiento en interiores de dimensión 0 generalmente solo necesita una estación base UWB y una etiqueta UWB para darse cuenta La etiqueta UWB y la estación base se comunican entre sí, y luego realizan el monitoreo de presencia del personal, la alarma y otras funciones a través de la interacción con el fondo;
El principio de la aplicación de posicionamiento unidimensional es la aplicación de rango, que puede conocer la posición relativa de la etiqueta del objetivo de posicionamiento. Es adecuada para túneles, tuberías, pozos de tuberías, minas y otros escenarios que no requieren una alta precisión de posicionamiento. la precisión es de aproximadamente 0,3 metros, consulte TWR a continuación para obtener más información.
El posicionamiento bidimensional necesita determinar las coordenadas X/Y del espacio, que se divide en dos casos; uno es para calcular la posición de la etiqueta a través de la distancia desde la etiqueta hasta la estación base; el otro es para determinar la posición de la etiqueta en el área a través de más de tres estaciones base, puede conocer con precisión la trayectoria de posición y comportamiento de la etiqueta objetivo de posicionamiento;
El posicionamiento tridimensional necesita conocer las coordenadas tridimensionales XYZ del equipo de posicionamiento.Al construir la estación base, es necesario aumentar la diferencia de altura del eje Z para garantizar la precisión del eje Z. Si se usa el método de medición de distancia, tres estaciones base pueden completar el posicionamiento tridimensional, y si se usa el método TDOA, se deben usar más de cuatro estaciones base para completarlo. Puede juzgar con precisión la posición de la etiqueta y el tiempo de residencia.
1. Configuración del sistema
El sistema de posicionamiento UWB se divide aproximadamente en capa de reconocimiento de ubicación, capa de transmisión de red y capa de aplicación de posicionamiento, que incluye principalmente: servidor de motor de posicionamiento, terminal inteligente, conmutador POE, estación base UWB, etiqueta UWB, módulo UWB, interfaz de software, etc.
2. Principio de funcionamiento
1) Cada etiqueta de posicionamiento envía tramas de datos repetidamente con pulsos UWB;
2) La ráfaga UWB enviada por la etiqueta de posicionamiento es recibida por la estación base de posicionamiento;
3) Cada estación base de posicionamiento utiliza un detector de pulsos cortos de alta sensibilidad para medir el tiempo en que la trama de datos de cada etiqueta de posicionamiento llega a la antena receptora;
4) El motor de posicionamiento se refiere a los datos de calibración enviados por la etiqueta, determina la diferencia de tiempo entre la etiqueta que llega a diferentes estaciones base de posicionamiento y utiliza la tecnología de posicionamiento de tres puntos y el algoritmo de optimización para calcular la posición de la etiqueta.
5) El algoritmo TDOA (diferencia horaria de llegada) se utiliza principalmente para el posicionamiento de estaciones base múltiples.
3. Escenarios de aplicación
Industrial/Automotriz: haga un seguimiento de los activos y el inventario en tiempo real, mejore los procesos, mejore la eficiencia de búsqueda y reduzca el desperdicio de recursos;
Almacenamiento logístico: rastree lectores de códigos de barras y montacargas, reduzca los enlaces de inspección de seguros y haga que la gestión del almacén sea flexible;
Militar: posicionamiento de personal y seguimiento de equipos, como entrenamiento de combate urbano, gestión de almacenes de municiones, investigación y desarrollo avanzados;
Atención médica: seguimiento en tiempo real de pacientes, atención y gestión, que conduce al análisis de enfermedades y la mejora del tratamiento, y es conveniente para la gestión de recursos humanos;
Entorno peligroso: ubicar personas y recursos, búsqueda de emergencia de lugares seguros, monitoreo de personal, optimizar el proceso de gestión y lograr seguridad y eficacia;
Áreas clave de seguridad: gestión de entradas y salidas de personal, consulta de ubicación en tiempo real, supervisión de áreas restringidas, control de distancia de aislamiento, programación de personal y puede monitorear y contar posiciones de personal, rutas de viaje, distancias y velocidades;
Deportes: seguimiento y cálculo en tiempo real de la dirección y velocidad de los atletas, análisis detallado del rendimiento, grabación del juego en vivo del equipo, integración de video.
Posicionamiento UWB PDOA
PDOA, el nombre completo en inglés es Phase-Difference-of-Arrival, también es un algoritmo de posicionamiento en interiores, que calcula el ángulo de llegada de la señal midiendo la diferencia de fase y calcula la distancia por el tiempo de propagación de ida y vuelta. PDOA es una tecnología de posicionamiento de azimut de dos a dos que calibra la dirección y la distancia del objetivo. Dado que el posicionamiento de PDOA no requiere medición ni calibración de coordenadas, la aplicación de escena de medición de distancia precisa + medición de ángulo precisa entre algunos dispositivos o entre dispositivos y El posicionamiento de personas PDOA es aún más ventajoso.
PDoA combina la distancia entre dos dispositivos con una medida de rumbo entre los dos, como se muestra en la Figura 2-14. Usando la información combinada de distancia y rumbo, la posición relativa de dos dispositivos se puede calcular sin ninguna infraestructura adicional. Para hacer esto, uno de los dispositivos debe estar equipado con al menos 2 antenas y poder medir la diferencia de fase de la portadora de señal que llega a cada antena. La fase no se ve afectada en absoluto por la deformación de la antena y permite una precisión de medición superior a 10°, lo que permite determinar la orientación del transmisor en menos de 5°.

UWB PDOA debe centrarse en la aplicación de escena de rango preciso + medición precisa del ángulo entre dispositivos o entre dispositivos y personas dentro de 10 metros; medición precisa de distancia + medición precisa de distancia de personas, vehículos y objetos en sitios industriales (dentro de 10 metros) Medición de ángulo; En comparación con el radar, el láser, la RFID y los infrarrojos, UWB tiene una gran tolerancia a los entornos hostiles y alta precisión, y también tiene ventajas en la miniaturización de equipos.
1. Configuración del sistema
El sistema UWB PDOA se divide aproximadamente en capa de reconocimiento de ubicación, capa de transmisión de red y capa de aplicación de posicionamiento, que incluye principalmente: estación base de posicionamiento PDOA, etiqueta de posicionamiento PDOA y estación base de posicionamiento PDOA, placa EVB de etiqueta de posicionamiento y cable de datos USB, etc.
2. Principio de funcionamiento

3. Aplicación UWB PDOA
Distancia segura entre equipos y personas
Control seguro de la distancia y el ángulo seguros del brazo robótico y el trabajador
Siguiente aplicación de automóvil: distancia segura y control de ángulo entre personas y automóviles
Seguimiento de drones: distancia segura entre humanos y drones y control de ángulo
Coche de seguimiento, vehículo aéreo no tripulado, percepción del espacio de posición cooperativa multiagente de todos los enlaces técnicos importantes de micro-robots, basado en UWB para realizar la comunicación de datos entre organismos cooperativos, así como medición de distancia TOF de alta precisión y medición de ángulo PDOA, en su lugar de la percepción de la posición visual compleja, mientras que resolver la comunicación de datos de alta velocidad y la percepción de la ubicación espacial, el costo y el consumo de energía serán más ventajosos.