Resumen: Este artículo estudia principalmente los componentes básicos del control de planificación para comprender mejor el sistema de conocimiento teórico relevante de cada módulo de control de planificación.
Directorio de artículos
prefacio
La tarea de planificación y control de vehículos no tripulados es básicamente tomar decisiones y controlar el vehículo de forma correcta y razonable en función de la percepción del entorno circundante, combinado con el destino del vehículo no tripulado y la ubicación del entorno actual.
1. Método de división del sistema de control de planificación
Todo el sistema de software de planificación de control de toma de decisiones se puede refinar en los siguientes métodos:
- Divida según los diferentes niveles de resolución de problemas o según la duración de la ventana de tiempo de resolución de problemas. Tales como Desglose en horizontes de largo, mediano y corto plazo.
- De acuerdo con el dominio del espacio y el dominio del tiempo para dividir. Como el desglose de la ruta espacial frente a la planificación de la velocidad.
- Refinamiento basado en las ventajas y desventajas del algoritmo, tales como: Búsqueda por homotopía vs optimización
El más utilizado es el método de división de desafío urbano comúnmente utilizado de DARPA (Agencia de Proyectos de Investigación Avanzada de Defensa de EE. UU.) de 2007, de acuerdo con los diferentes niveles de división de resolución de problemas.

De acuerdo con el método de solución de arriba hacia abajo, se divide en los siguientes módulos:
- Planificación de ruta/misión: planificación de ruta
- Planificador de comportamiento/Marcado de decisiones: decisión de comportamiento
- Planificación de movimiento/Planificador local: planificación de movimiento
- Control de movimiento: control de movimiento
- vehículo: vehículo
2. Composición básica del control de planificación
1. Planificación de rutas (Misson / Planificación de rutas)
La planificación de rutas se refiere a generar una ruta geométrica que conecta la posición inicial y la posición final del vehículo.
La planificación de rutas se divide en:
- Planificación de ruta global (planificación de ruta): planifique una ruta óptima factible desde el punto de inicio hasta el punto final de acuerdo con el mapa estático global.
- Planificación de rutas parciales (planificación de misiones)
Como el módulo más avanzado del sistema de control de planificación de toma de decisiones de vehículos no tripulados, la planificación de rutas resuelve el problema de calcular una secuencia de conducción (orden de carril) desde el punto de partida hasta el destino de la mejor carretera en función del punto de partida y el destino. como muestra la imagen.

Entrada de planificación de ruta: punto de partida, destino, gráfico de carretera, función de costo (función de pérdida)
Salida de planificación de ruta: secuencia de carriles, los segmentos de carretera dependen estrictamente del dibujo de mapas de alta precisión .
Principio: en primer lugar, en función de la red de carreteras dibujada por el mapa de alta precisión, todas las carreteras (carriles) posibles se distribuyen dentro de un cierto rango. Llamamos a estos puntos puntos de carril. Estos puntos representan los puntos de muestreo de las posiciones de carril por las que pueden pasar los vehículos no tripulados. Los puntos y los puntos están conectados por bordes dirigidos y ponderados
método de búsqueda de gráfico:
- Dijkstra:
el algoritmo de Dijkstra es un algoritmo basado en "codicioso", "búsqueda primero en amplitud" y "programación dinámica" para encontrar el camino más corto desde un punto en un gráfico a todos los demás puntos, con una complejidad de tiempo de O (n2) . - El algoritmo A*
A* (pronunciado: A Star) es un algoritmo de búsqueda de rutas y de recorrido de gráficos muy utilizado. Tiene mejor rendimiento y precisión.
El algoritmo A* fue publicado originalmente en 1968 por Peter Hart, Nils Nilsson y Bertram Raphael del Stanford Research Institute. Puede considerarse como una extensión del algoritmo de Dijkstra.
Basado en sus principios y métodos de algoritmo específicos, los siguientes artículos lo describirán en detalle.
2. Toma de decisiones conductuales
La toma de decisiones de comportamiento desempeña el papel de copiloto en todo el sistema de control de planificación del vehículo no tripulado, sirviendo como un cerebro importante para el comportamiento y la toma de decisiones del vehículo no tripulado durante la conducción.
La toma de decisiones de comportamiento reúne mucha información importante sobre el vehículo, entre las cuales:
- Información sobre el propio vehículo: estado actual, posición, velocidad, orientación, carril y trayectoria
- Información detectada por vehículos no tripulados dentro de una cierta distancia
- Información de viaje
El problema que resuelve la toma de decisiones conductuales es conocer toda la información anterior y combinar la experiencia de conducción humana para diseñar estrategias de conducción de vehículos no tripulados.
Entrada de decisión de comportamiento:
- Mensaje del plan: La trayectoria del vehículo.
- mensaje de estado: posición, velocidad, rumbo y carril.
- Mensaje de reenvío: qué decisiones se tomaron en el último ciclo de decisión de comportamiento del vehículo no tripulado, como seguir al automóvil, estacionar, girar, adelantar, cambiar de carril, etc.
- Mensaje de obstáculo: como la información de estado, la intención y la trayectoria prevista del vehículo objetivo cerca de la intersección.
- Mensaje de reconocimiento de tráfico: como el cambio de carril dentro de un cierto rango, el camino de la naturaleza humana encontrado desde el camino recto al camino de giro a la izquierda, señales de tráfico, semáforos, etc.
- Experiencia humana: El estilo de conducción y los hábitos de conducción del conductor.
Salida de decisión de comportamiento: macro instrucciones de decisión de comportamiento, que se suministran a la planificación de movimiento aguas abajo para una ejecución específica.
La toma de decisiones conductuales es difícil de resolver con un modelo matemático puro porque reúne muchos tipos de información importantes y diferentes.
A continuación se resumen varios métodos comunes de planificación de la toma de decisiones conductuales:
-
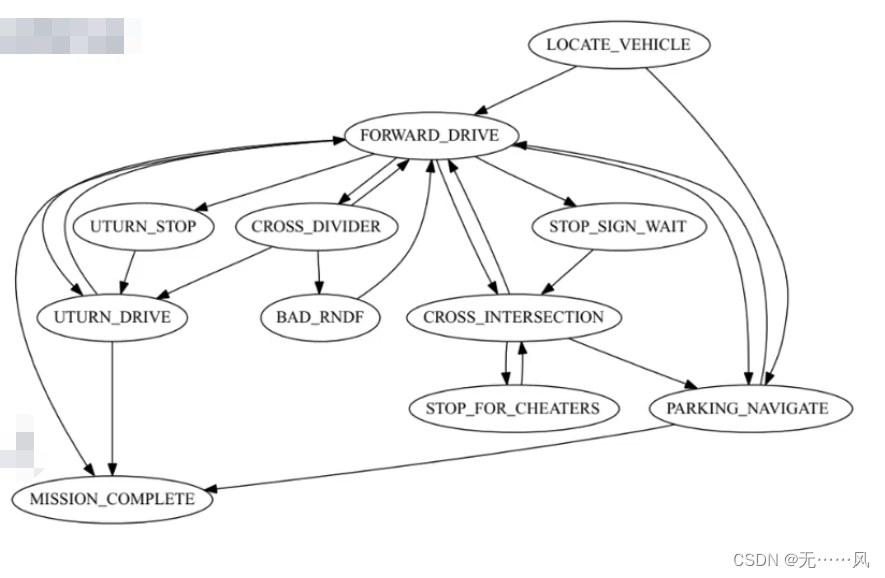
Máquina de estados finitos (Máquina de estados finitos)
El mecanismo operativo de la máquina de estados finitos es aproximadamente:
(1) El estado del sistema es claro y limitado, y debe pertenecer a uno del conjunto completo de estados;
(2) El sistema acepta la entrada, de acuerdo con las Condiciones de juicio, decide si mantener el estado actual o cambiar a un nuevo estado;
(3) Durante el proceso de mantenimiento o cambio, realizar algunas operaciones preestablecidas.
Se puede considerar que la máquina de estados finitos es un sistema discreto, y cada vez que se recibe una entrada, se realiza un juicio y una conmutación. -
Enfoque basado en reglas (Enfoque basado en reglas: planificación de infracción mínima)
-
Basado en métodos formales (Métodos formales (STL, LTL, álgebra de proceso, u-calulus))
como: Lógica de tiempo lineal (LTL): Lógica de tiempo lineal, proporciona un método de representación muy intuitivo pero matemáticamente preciso para describir propiedades de tiempo lineal. Es un método formal para describir las restricciones del sistema y es un tipo de lógica modal en la que los operadores modales se utilizan para indicar el orden del tiempo en lugar del tiempo preciso. -
Proceso de decisión de Markov (Proceso de decisión de Markov)
El proceso de decisión de Markov (proceso de decisión de Markov, denominado MDP) es un concepto importante en el aprendizaje por refuerzo. El proceso de tomar una decisión.
En resumen: la toma de decisiones de comportamiento es determinar el estado de conducción actual en función de la comprensión de la escena del tráfico actual y la información de percepción ambiental, y planificar un comportamiento de conducción razonable bajo las restricciones de las normas de tráfico y la guía de la experiencia de conducción.
3. Planificación de movimiento (Planificación de movimiento/Planificación local)
La planificación de acciones consiste en resolver el problema de los vehículos no tripulados desde el punto A hasta el punto B en un área de espacio-tiempo pequeña. Es decir, un método de navegación de un vehículo autónomo desde su ubicación actual hasta su destino bajo la premisa de seguir las normas de circulación vial.
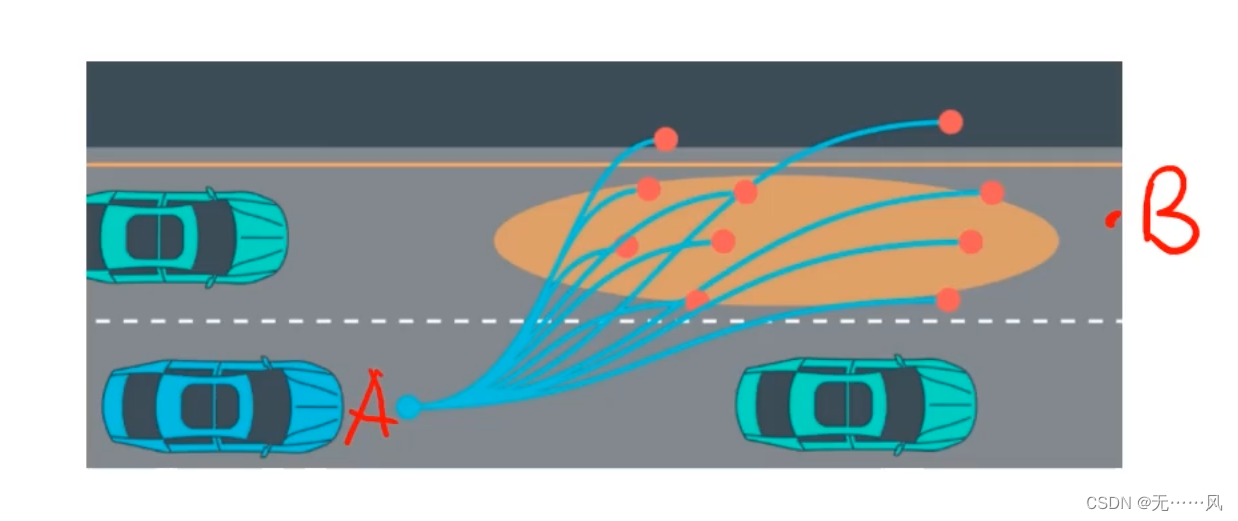
En comparación con la toma de decisiones de comportamiento, la planificación de acciones debe ser más específica.La solución específica para la planificación de rutas de vehículos no tripulados desde el punto A hasta el punto B en un corto período de tiempo incluye:
- Qué ruta elegir y los waypoints específicos.
- La velocidad, la orientación, la aceleración y las variables de movimiento relacionadas (curvatura de aceleración, alto recíproco de curvatura, etc.) del vehículo no tripulado que llega a cada punto de referencia.
Entrada de planificación de acción:
- informacion de conciencia ambiental
- Información sobre la ubicación
- información del mapa
Resultado de la planificación de la acción:
- seguimiento con información de tiempo
La planificación de la acción debe garantizar los dos puntos siguientes:
- En el período subsiguiente, la generación de la trayectoria espacio-temporal del punto A al punto B necesita mantener un cierto grado de consistencia.
- La generación de los puntos de trayectoria del punto A al punto B debe garantizar que la velocidad, la orientación, la aceleración, etc. de cada punto estén dentro del rango físico en el que el control de retroalimentación aguas abajo puede operar realmente.
En resumen, la planificación de movimiento consiste en interpretar las macroinstrucciones de toma de decisiones de comportamiento en una curva de trayectoria con información de tiempo de acuerdo con la percepción del entorno y la ubicación, para dar al control de retroalimentación de nivel inferior (control de movimiento) el control real del coche operar.
La planificación del movimiento generalmente se puede dividir en dos partes:
- La planificación de la trayectoria (planificación de la trayectoria)
resuelve el problema de optimizar la trayectoria bajo la función de costo definida en el plano bidimensional basado en decisiones de comportamiento e información del mapa. - La planificación de velocidad (speed planning)
resuelve el problema de qué velocidad usar después de seleccionar la trayectoria.
Los métodos comunes para la planificación de la acción son los siguientes:
- Métodos basados en la búsqueda
- Métodos de muestreo estocástico Los
métodos de muestreo estocástico también se denominan métodos de muestreo aleatorio El propósito de la búsqueda conformacional es encontrar todas las conformaciones preferidas del objetivo. Estas conformaciones están asociadas con mínimos locales de la superficie de energía potencial. Mínimos locales más profundos pueden corresponder a estados objetivo observables, parcialmente estables. Los métodos de muestreo aleatorio se pueden utilizar para explorar la superficie de energía potencial y, por lo tanto, ubicar los mínimos locales. - MPC
En resumen, el módulo de planificación de movimiento es para resolver un problema de optimización bajo ciertas restricciones.
revisar:
El proceso general de planificación es el siguiente:
planificación de ruta—decisión de comportamiento—planificación de acción, como se muestra en la siguiente figura.
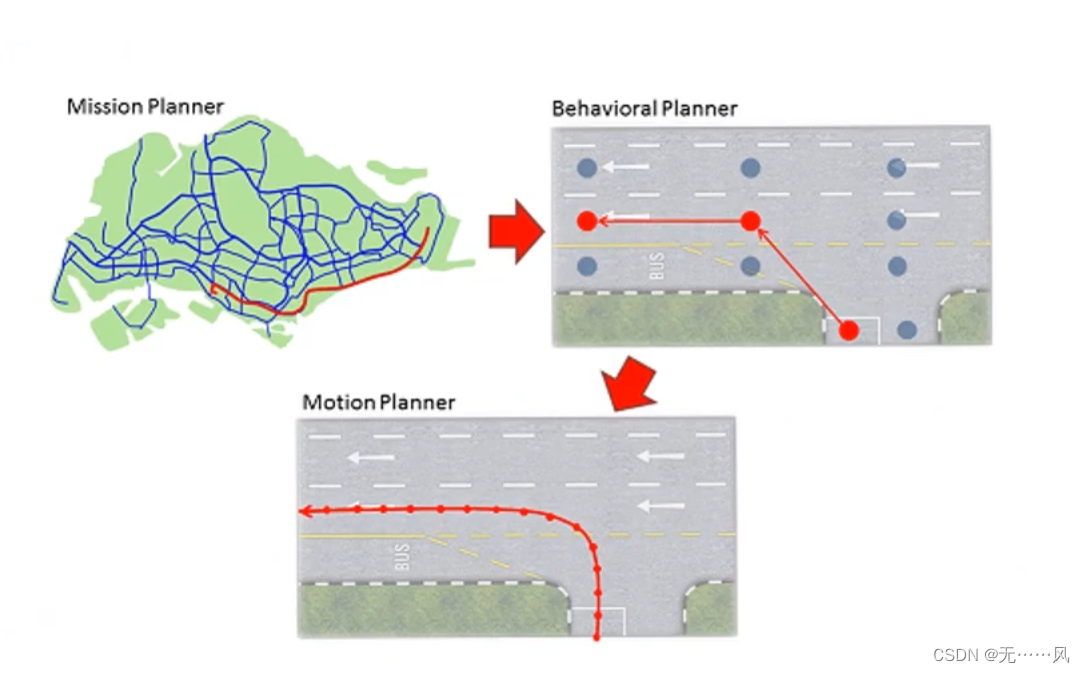
- Planificación de rutas: planifique una secuencia de carreteras óptima en función del mapa estático global, la ubicación del punto de inicio y el punto final, y la función de pérdida.
- Toma de decisiones de comportamiento: al aceptar los resultados de la planificación de la ruta y la información de la predicción de la percepción, decida de manera integral cómo conducir el vehículo no tripulado, como seguir al automóvil, cambiar de carril, evitar obstáculos, encontrar semáforos, esperar a los peatones, etc.
- Planificación de movimiento: calcule por qué puntos de ruta debemos pasar y la orientación, velocidad, aceleración y otra información de los vehículos no tripulados que pasan por estos puntos de acuerdo con los resultados de salida de la decisión de comportamiento aceptada.
4. Control de movimiento
Controle el vehículo tanto como sea posible para seguir la trayectoria espacio-temporal (trayectoria) emitida por la planificación de movimiento. Este módulo está conectado directamente a la interfaz de control inferior CANBus del vehículo no tripulado. Su tarea principal es digerir los puntos de trayectoria emitidos por el módulo de planificación superior.
Al combinar los cálculos dinámicos de los atributos del vehículo y los factores físicos externos, se convierte en un control lineal (accionamiento por cable) del vehículo (aceleración, frenos, volante) para controlar el vehículo tanto como sea posible para ejecutar el vehículo. a lo largo de la trayectoria.
Entrada de control de movimiento:
- pista de movimiento
- información de estado
Salida de control de movimiento:
- Control de dirección
- Control del acelerador
- Control de freno
El módulo de control incluye principalmente:
- control del propio vehículo
- Modelización de la interacción con el entorno físico externo
Los métodos de control comunes son los siguientes:
- PID
El algoritmo PID es uno de los algoritmos más utilizados en aplicaciones industriales.En el control de sistemas de circuito cerrado, puede corregir automáticamente el sistema de control con precisión y rapidez. El algoritmo PID tiene una historia de más de 100 años y se utiliza en cuadricópteros, autos de equilibrio, control de crucero de autos, controladores de temperatura y otros escenarios. - Stanley
El método Stanley es una función de retroalimentación no lineal basada en que el error de seguimiento del control lateral es la distancia desde el centro del eje delantero hasta el punto de ruta más cercano, y puede lograr que el error de seguimiento lateral converja exponencialmente a cero. De acuerdo con la relación geométrica relativa entre la posición del vehículo y la trayectoria dada, las variables de control para controlar el ángulo del volante del vehículo pueden obtenerse intuitivamente. - Persecución pura
El método de Persecución Pura, como su nombre indica, es un seguimiento de trayectoria puro. Es un algoritmo de seguimiento de caminos basado en el trazado geométrico, propuesto por Craig Coulter en 1992. Debido a que el método de control es relativamente simple y directo, no es necesario considerar demasiado el modelo de cinemática y dinámica del vehículo, y hay pocos parámetros de ajuste, por lo que puede aplicarse a vehículos autónomos o robots móviles. - LQR
LQR (regulador cuadrático lineal) es un regulador cuadrático lineal, que es el método de diseño de espacio de estado más antiguo y maduro en la teoría de control moderna. LQR puede obtener la ley de control óptimo de retroalimentación lineal de estado, y es fácil formar un control óptimo de circuito cerrado. - MPC
El nombre completo de MPC puede hacer referencia al modelo de control predictivo de control predictivo (también conocido como RHC, Receding Horizon).
Principio : en cada momento de adopción, de acuerdo con la información de medición actual obtenida, se resuelve en línea un problema de optimización de bucle abierto de tiempo finito y el primer elemento de la secuencia de control obtenida se aplica al objeto controlado. En el siguiente tiempo de muestreo, repita el proceso anterior: use el nuevo valor medido como condición inicial para predecir la dinámica futura del sistema en este momento, actualice el problema de optimización y resuélvalo nuevamente.
Características : la característica más importante de MPC es que, en comparación con el control LQR, MPC puede considerar varias restricciones de variables de estado de espacio, mientras que LQR, PID y otros controles solo pueden considerar varias restricciones de variables de entrada y salida.
Resumir
Este artículo es principalmente una descripción general del aprendizaje del control de planificación de conducción autónoma. Presenta principalmente el método de división del sistema de control de planificación, los componentes básicos del control de planificación y los principios principales, problemas y soluciones comunes de cada módulo. Este artículo espera ser capaz de entender Será útil para los estudiantes que quieran entender y aprender la dirección de la planificación y el control de conducción automática.
Amigos a quienes les gusta, muevan sus manitas para seguir, compartiré regularmente algunos de mis resúmenes de conocimientos y experiencias, ¡gracias!