Estudie el proyecto de demostración dodge_the_creeps y descubra que hay Path2D y PathFollow2D adicionales

Al investigar el código GDScript, se encontró que se usa principalmente para generar Mob aleatoriamente.
var mob_spawn_location = get_node(^"MobPath/MobSpawnLocation")
mob_spawn_location.progress = randi()
# Set the mob's direction perpendicular to the path direction.
var direction = mob_spawn_location.rotation + PI / 2
# Set the mob's position to a random location.
mob.position = mob_spawn_location.position
# Add some randomness to the direction.
direction += randf_range(-PI / 4, PI / 4)
mob.rotation = direction
# Choose the velocity for the mob.
var velocity = Vector2(randf_range(150.0, 250.0), 0.0)
mob.linear_velocity = velocity.rotated(direction)Esto tiene un efecto tan grande, no sé qué tan grave es
pero no se como empezar
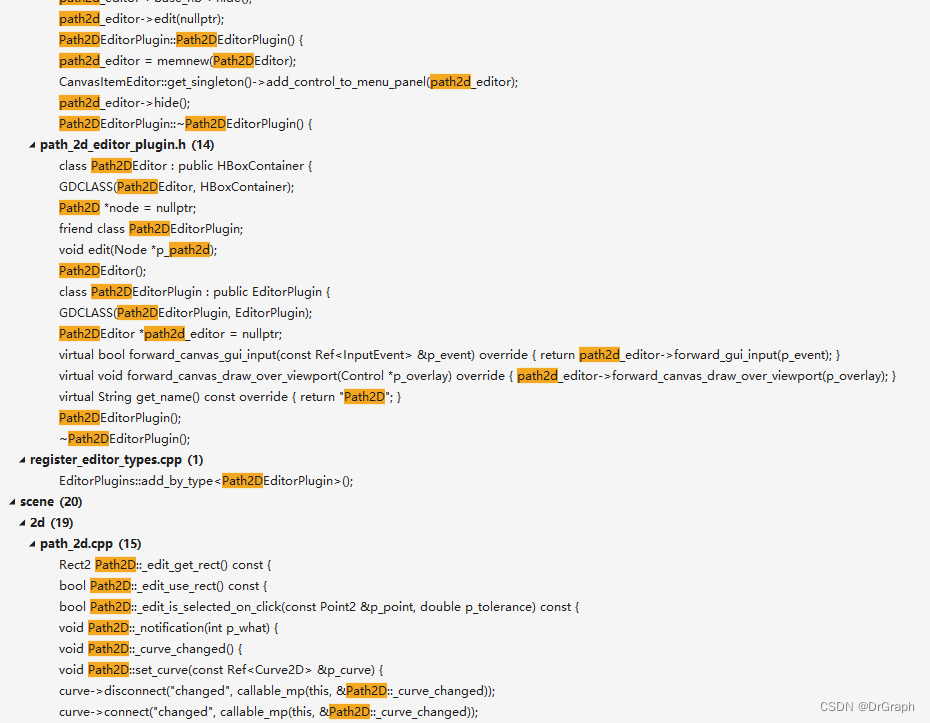
Ver código fuente, con editor y código fuente de clase
Desde el punto de vista de la aplicación, fui a la estación B para averiguar si hay algún video y encontré esto
Godot tower defense game-01-core path haciendo Path2D_哔哩哔哩_bilibili
Después de leerlo, sabrá cómo usarlo:
- Añadir Path2D
- Establecer los puntos clave de la ruta en el editor para formar una ruta
- Agregue PathFollow2D en Path2D
Está bien. Todo lo que queda es usar
El llamado uso, la entrada es el progreso de PathFollow2D, la salida es la información del punto (posición, rotación...) en la ruta, y luego el usuario determina los atributos correspondientes de acuerdo con esta información
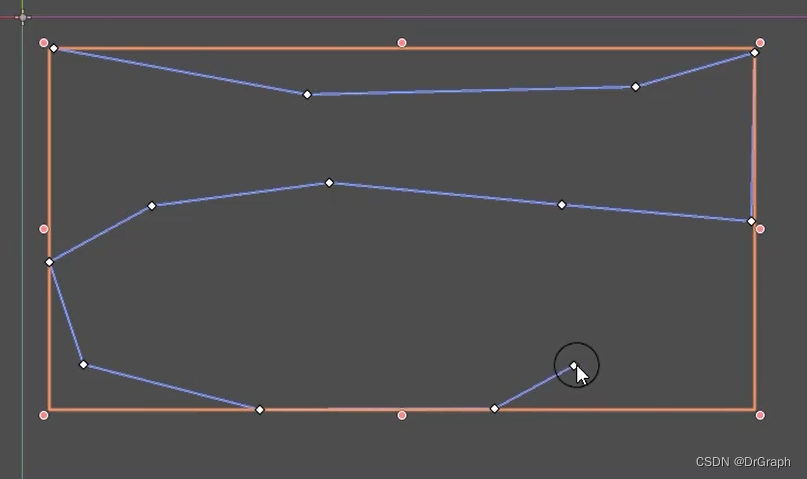
Por ejemplo, en el proyecto de demostración, Path2D personaliza una ruta de marco (esquina superior izquierda> esquina superior derecha> esquina inferior derecha> esquina inferior izquierda> esquina superior izquierda).Al generar MOB, especifique aleatoriamente el valor de progreso de PathFollow2D debajo de él como randi (), que es un número entero aleatorio de 0 ~ 2^32 - 1. Debido a que la ruta tiene una longitud, que es 2400 en este ejemplo, el valor de randi() será módulo 2400 para obtener el valor aleatorio final de 0 a 2399. Por supuesto, también se puede normalizar Establezca su valor de relación de progreso en 0,0 a 1,0 , que significa lo mismo.
Mirando el código fuente, la lógica de set_progress no solo es módulo, sino también limitada. Es decir, PathFollow2D también tiene un atributo Loop. Si Loop es verdadero, tomará el módulo. Si es falso, se limitará directamente a la longitud de la ruta. progreso = CLAMP (progreso, 0, ruta_longitud); y luego actualice _actualizar_transformar uniformemente
void PathFollow2D::set_progress(real_t p_progress) {
ERR_FAIL_COND(!isfinite(p_progress));
progress = p_progress;
if (path) {
if (path->get_curve().is_valid()) {
real_t path_length = path->get_curve()->get_baked_length();
if (loop && path_length) {
progress = Math::fposmod(progress, path_length);
if (!Math::is_zero_approx(p_progress) && Math::is_zero_approx(progress)) {
progress = path_length;
}
} else {
progress = CLAMP(progress, 0, path_length);
}
}
_update_transform();
}
}
void PathFollow2D::_update_transform() {
if (!path) {
return;
}
Ref<Curve2D> c = path->get_curve();
if (!c.is_valid()) {
return;
}
real_t path_length = c->get_baked_length();
if (path_length == 0) {
return;
}
if (rotates) {
Transform2D xform = c->sample_baked_with_rotation(progress, cubic);
xform.translate_local(v_offset, h_offset);
set_rotation(xform[1].angle());
set_position(xform[2]);
} else {
Vector2 pos = c->sample_baked(progress, cubic);
pos.x += h_offset;
pos.y += v_offset;
set_position(pos);
}
}Del código PathFollow2D, se deriva de Node2D, por lo que tiene atributos de transformación: Posición, Rotación, Escala, Sesgo. Para el uso de puntos en la ruta, esta información es suficiente para determinar la posición y la dirección de estos puntos. De hecho , es un vector
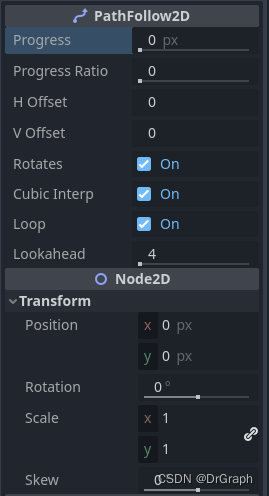
El significado del valor del atributo Loop se ha aclarado anteriormente. Las rotaciones, cúbicas, compensaciones H y compensaciones V funcionan en _update_transform, y el algoritmo específico puede ignorarse. Pero lookahead no encontró un uso específico, y siento que tiene poco impacto.
class PathFollow2D : public Node2D {
GDCLASS(PathFollow2D, Node2D);
public:
private:
Path2D *path = nullptr;
real_t progress = 0.0;
Timer *update_timer = nullptr;
real_t h_offset = 0.0;
real_t v_offset = 0.0;
real_t lookahead = 4.0;
bool cubic = true;
bool loop = true;
bool rotates = true;
void _update_transform();
protected:
void _validate_property(PropertyInfo &p_property) const;
void _notification(int p_what);
static void _bind_methods();
public:
void path_changed();
void set_progress(real_t p_progress);
real_t get_progress() const;
void set_h_offset(real_t p_h_offset);
real_t get_h_offset() const;
void set_v_offset(real_t p_v_offset);
real_t get_v_offset() const;
void set_progress_ratio(real_t p_ratio);
real_t get_progress_ratio() const;
void set_lookahead(real_t p_lookahead);
real_t get_lookahead() const;
void set_loop(bool p_loop);
bool has_loop() const;
void set_rotates(bool p_rotates);
bool is_rotating() const;
void set_cubic_interpolation(bool p_enable);
bool get_cubic_interpolation() const;
PackedStringArray get_configuration_warnings() const override;
PathFollow2D() {}
};
void PathFollow2D::path_changed() {
if (update_timer && !update_timer->is_stopped()) {
update_timer->start();
} else {
_update_transform();
}
}
void PathFollow2D::_update_transform() {
if (!path) {
return;
}
Ref<Curve2D> c = path->get_curve();
if (!c.is_valid()) {
return;
}
real_t path_length = c->get_baked_length();
if (path_length == 0) {
return;
}
if (rotates) {
Transform2D xform = c->sample_baked_with_rotation(progress, cubic);
xform.translate_local(v_offset, h_offset);
set_rotation(xform[1].angle());
set_position(xform[2]);
} else {
Vector2 pos = c->sample_baked(progress, cubic);
pos.x += h_offset;
pos.y += v_offset;
set_position(pos);
}
}
void PathFollow2D::_notification(int p_what) {
switch (p_what) {
case NOTIFICATION_READY: {
if (Engine::get_singleton()->is_editor_hint()) {
update_timer = memnew(Timer);
update_timer->set_wait_time(0.2);
update_timer->set_one_shot(true);
update_timer->connect("timeout", callable_mp(this, &PathFollow2D::_update_transform));
add_child(update_timer, false, Node::INTERNAL_MODE_BACK);
}
} break;
case NOTIFICATION_ENTER_TREE: {
path = Object::cast_to<Path2D>(get_parent());
if (path) {
_update_transform();
}
} break;
case NOTIFICATION_EXIT_TREE: {
path = nullptr;
} break;
}
}
void PathFollow2D::set_cubic_interpolation(bool p_enable) {
cubic = p_enable;
}
bool PathFollow2D::get_cubic_interpolation() const {
return cubic;
}
void PathFollow2D::_validate_property(PropertyInfo &p_property) const {
if (p_property.name == "offset") {
real_t max = 10000.0;
if (path && path->get_curve().is_valid()) {
max = path->get_curve()->get_baked_length();
}
p_property.hint_string = "0," + rtos(max) + ",0.01,or_less,or_greater";
}
}
PackedStringArray PathFollow2D::get_configuration_warnings() const {
PackedStringArray warnings = Node::get_configuration_warnings();
if (is_visible_in_tree() && is_inside_tree()) {
if (!Object::cast_to<Path2D>(get_parent())) {
warnings.push_back(RTR("PathFollow2D only works when set as a child of a Path2D node."));
}
}
return warnings;
}
void PathFollow2D::_bind_methods() {
ClassDB::bind_method(D_METHOD("set_progress", "progress"), &PathFollow2D::set_progress);
ClassDB::bind_method(D_METHOD("get_progress"), &PathFollow2D::get_progress);
ClassDB::bind_method(D_METHOD("set_h_offset", "h_offset"), &PathFollow2D::set_h_offset);
ClassDB::bind_method(D_METHOD("get_h_offset"), &PathFollow2D::get_h_offset);
ClassDB::bind_method(D_METHOD("set_v_offset", "v_offset"), &PathFollow2D::set_v_offset);
ClassDB::bind_method(D_METHOD("get_v_offset"), &PathFollow2D::get_v_offset);
ClassDB::bind_method(D_METHOD("set_progress_ratio", "ratio"), &PathFollow2D::set_progress_ratio);
ClassDB::bind_method(D_METHOD("get_progress_ratio"), &PathFollow2D::get_progress_ratio);
ClassDB::bind_method(D_METHOD("set_rotates", "enable"), &PathFollow2D::set_rotates);
ClassDB::bind_method(D_METHOD("is_rotating"), &PathFollow2D::is_rotating);
ClassDB::bind_method(D_METHOD("set_cubic_interpolation", "enable"), &PathFollow2D::set_cubic_interpolation);
ClassDB::bind_method(D_METHOD("get_cubic_interpolation"), &PathFollow2D::get_cubic_interpolation);
ClassDB::bind_method(D_METHOD("set_loop", "loop"), &PathFollow2D::set_loop);
ClassDB::bind_method(D_METHOD("has_loop"), &PathFollow2D::has_loop);
ClassDB::bind_method(D_METHOD("set_lookahead", "lookahead"), &PathFollow2D::set_lookahead);
ClassDB::bind_method(D_METHOD("get_lookahead"), &PathFollow2D::get_lookahead);
ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "progress", PROPERTY_HINT_RANGE, "0,10000,0.01,or_less,or_greater,suffix:px"), "set_progress", "get_progress");
ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "progress_ratio", PROPERTY_HINT_RANGE, "0,1,0.0001,or_less,or_greater", PROPERTY_USAGE_EDITOR), "set_progress_ratio", "get_progress_ratio");
ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "h_offset"), "set_h_offset", "get_h_offset");
ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "v_offset"), "set_v_offset", "get_v_offset");
ADD_PROPERTY(PropertyInfo(Variant::BOOL, "rotates"), "set_rotates", "is_rotating");
ADD_PROPERTY(PropertyInfo(Variant::BOOL, "cubic_interp"), "set_cubic_interpolation", "get_cubic_interpolation");
ADD_PROPERTY(PropertyInfo(Variant::BOOL, "loop"), "set_loop", "has_loop");
ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "lookahead", PROPERTY_HINT_RANGE, "0.001,1024.0,0.001"), "set_lookahead", "get_lookahead");
}
void PathFollow2D::set_progress(real_t p_progress) {
ERR_FAIL_COND(!isfinite(p_progress));
progress = p_progress;
if (path) {
if (path->get_curve().is_valid()) {
real_t path_length = path->get_curve()->get_baked_length();
if (loop && path_length) {
progress = Math::fposmod(progress, path_length);
if (!Math::is_zero_approx(p_progress) && Math::is_zero_approx(progress)) {
progress = path_length;
}
} else {
progress = CLAMP(progress, 0, path_length);
}
}
_update_transform();
}
}
void PathFollow2D::set_h_offset(real_t p_h_offset) {
h_offset = p_h_offset;
if (path) {
_update_transform();
}
}
real_t PathFollow2D::get_h_offset() const {
return h_offset;
}
void PathFollow2D::set_v_offset(real_t p_v_offset) {
v_offset = p_v_offset;
if (path) {
_update_transform();
}
}
real_t PathFollow2D::get_v_offset() const {
return v_offset;
}
real_t PathFollow2D::get_progress() const {
return progress;
}
void PathFollow2D::set_progress_ratio(real_t p_ratio) {
if (path && path->get_curve().is_valid() && path->get_curve()->get_baked_length()) {
set_progress(p_ratio * path->get_curve()->get_baked_length());
}
}
real_t PathFollow2D::get_progress_ratio() const {
if (path && path->get_curve().is_valid() && path->get_curve()->get_baked_length()) {
return get_progress() / path->get_curve()->get_baked_length();
} else {
return 0;
}
}
void PathFollow2D::set_lookahead(real_t p_lookahead) {
lookahead = p_lookahead;
}
real_t PathFollow2D::get_lookahead() const {
return lookahead;
}
void PathFollow2D::set_rotates(bool p_rotates) {
rotates = p_rotates;
_update_transform();
}
bool PathFollow2D::is_rotating() const {
return rotates;
}
void PathFollow2D::set_loop(bool p_loop) {
loop = p_loop;
}
bool PathFollow2D::has_loop() const {
return loop;
}
Desde el punto de vista del código y el uso, Path2D no tiene nada que ver y es responsable de proporcionar una ruta curva.
class Path2D : public Node2D {
GDCLASS(Path2D, Node2D);
Ref<Curve2D> curve;
void _curve_changed();
protected:
void _notification(int p_what);
static void _bind_methods();
public:
#ifdef TOOLS_ENABLED
virtual Rect2 _edit_get_rect() const override;
virtual bool _edit_use_rect() const override;
virtual bool _edit_is_selected_on_click(const Point2 &p_point, double p_tolerance) const override;
#endif
void set_curve(const Ref<Curve2D> &p_curve);
Ref<Curve2D> get_curve() const;
Path2D() {}
};
#ifdef TOOLS_ENABLED
Rect2 Path2D::_edit_get_rect() const {
if (!curve.is_valid() || curve->get_point_count() == 0) {
return Rect2(0, 0, 0, 0);
}
Rect2 aabb = Rect2(curve->get_point_position(0), Vector2(0, 0));
for (int i = 0; i < curve->get_point_count(); i++) {
for (int j = 0; j <= 8; j++) {
real_t frac = j / 8.0;
Vector2 p = curve->sample(i, frac);
aabb.expand_to(p);
}
}
return aabb;
}
bool Path2D::_edit_use_rect() const {
return curve.is_valid() && curve->get_point_count() != 0;
}
bool Path2D::_edit_is_selected_on_click(const Point2 &p_point, double p_tolerance) const {
if (curve.is_null()) {
return false;
}
for (int i = 0; i < curve->get_point_count(); i++) {
Vector2 s[2];
s[0] = curve->get_point_position(i);
for (int j = 1; j <= 8; j++) {
real_t frac = j / 8.0;
s[1] = curve->sample(i, frac);
Vector2 p = Geometry2D::get_closest_point_to_segment(p_point, s);
if (p.distance_to(p_point) <= p_tolerance) {
return true;
}
s[0] = s[1];
}
}
return false;
}
#endif
void Path2D::_notification(int p_what) {
switch (p_what) {
// Draw the curve if path debugging is enabled.
case NOTIFICATION_DRAW: {
if (!curve.is_valid()) {
break;
}
if (!Engine::get_singleton()->is_editor_hint() && !get_tree()->is_debugging_paths_hint()) {
return;
}
if (curve->get_point_count() < 2) {
return;
}
#ifdef TOOLS_ENABLED
const real_t line_width = get_tree()->get_debug_paths_width() * EDSCALE;
#else
const real_t line_width = get_tree()->get_debug_paths_width();
#endif
real_t interval = 10;
const real_t length = curve->get_baked_length();
if (length > CMP_EPSILON) {
const int sample_count = int(length / interval) + 2;
interval = length / (sample_count - 1); // Recalculate real interval length.
Vector<Transform2D> frames;
frames.resize(sample_count);
{
Transform2D *w = frames.ptrw();
for (int i = 0; i < sample_count; i++) {
w[i] = curve->sample_baked_with_rotation(i * interval, false);
}
}
const Transform2D *r = frames.ptr();
// Draw curve segments
{
PackedVector2Array v2p;
v2p.resize(sample_count);
Vector2 *w = v2p.ptrw();
for (int i = 0; i < sample_count; i++) {
w[i] = r[i].get_origin();
}
draw_polyline(v2p, get_tree()->get_debug_paths_color(), line_width, false);
}
// Draw fish bones
{
PackedVector2Array v2p;
v2p.resize(3);
Vector2 *w = v2p.ptrw();
for (int i = 0; i < sample_count; i++) {
const Vector2 p = r[i].get_origin();
const Vector2 side = r[i].columns[0];
const Vector2 forward = r[i].columns[1];
// Fish Bone.
w[0] = p + (side - forward) * 5;
w[1] = p;
w[2] = p + (-side - forward) * 5;
draw_polyline(v2p, get_tree()->get_debug_paths_color(), line_width * 0.5, false);
}
}
}
} break;
}
}
void Path2D::_curve_changed() {
if (!is_inside_tree()) {
return;
}
if (!Engine::get_singleton()->is_editor_hint() && !get_tree()->is_debugging_paths_hint()) {
return;
}
queue_redraw();
for (int i = 0; i < get_child_count(); i++) {
PathFollow2D *follow = Object::cast_to<PathFollow2D>(get_child(i));
if (follow) {
follow->path_changed();
}
}
}
void Path2D::set_curve(const Ref<Curve2D> &p_curve) {
if (curve.is_valid()) {
curve->disconnect("changed", callable_mp(this, &Path2D::_curve_changed));
}
curve = p_curve;
if (curve.is_valid()) {
curve->connect("changed", callable_mp(this, &Path2D::_curve_changed));
}
_curve_changed();
}
Ref<Curve2D> Path2D::get_curve() const {
return curve;
}
void Path2D::_bind_methods() {
ClassDB::bind_method(D_METHOD("set_curve", "curve"), &Path2D::set_curve);
ClassDB::bind_method(D_METHOD("get_curve"), &Path2D::get_curve);
ADD_PROPERTY(PropertyInfo(Variant::OBJECT, "curve", PROPERTY_HINT_RESOURCE_TYPE, "Curve2D", PROPERTY_USAGE_DEFAULT | PROPERTY_USAGE_EDITOR_INSTANTIATE_OBJECT), "set_curve", "get_curve");
}
Por supuesto, no es inútil, por ejemplo, al especificar dinámicamente una ruta, puede establecer una Curva2D y asignarla a Ruta2D, y luego actuar en consecuencia.
Por ejemplo, en este proyecto de demostración,
var curve = Curve2D.new()
curve.add_point(Vector2i(100, 100))
curve.add_point(Vector2i(400, 600))
$MobPath.curve = curveLuego, el jugador permanece en la esquina superior derecha, esta es la esquina muerta de esos MOB, el jugador puede vivir lo suficiente como para alejar al usuario.
