| nombre del proyecto |
Periféricos Experiment 7 ROS [Kinetic/Melodic/Noetic] |
puntaje |
|
| Contenido: use gamepad, use sensor RGBD, controlador de cámara ROS [Kinetic/Melodic/Noetic], biblioteca ROS [Kinetic/Melodic/Noetic] y OpenCV, cámara de calibración, odometría visual, biblioteca de nubes de puntos, nube de puntos visualizada, filtrado y reducción de muestreo, Registro y coincidencia, partición de nubes de puntos |
|||
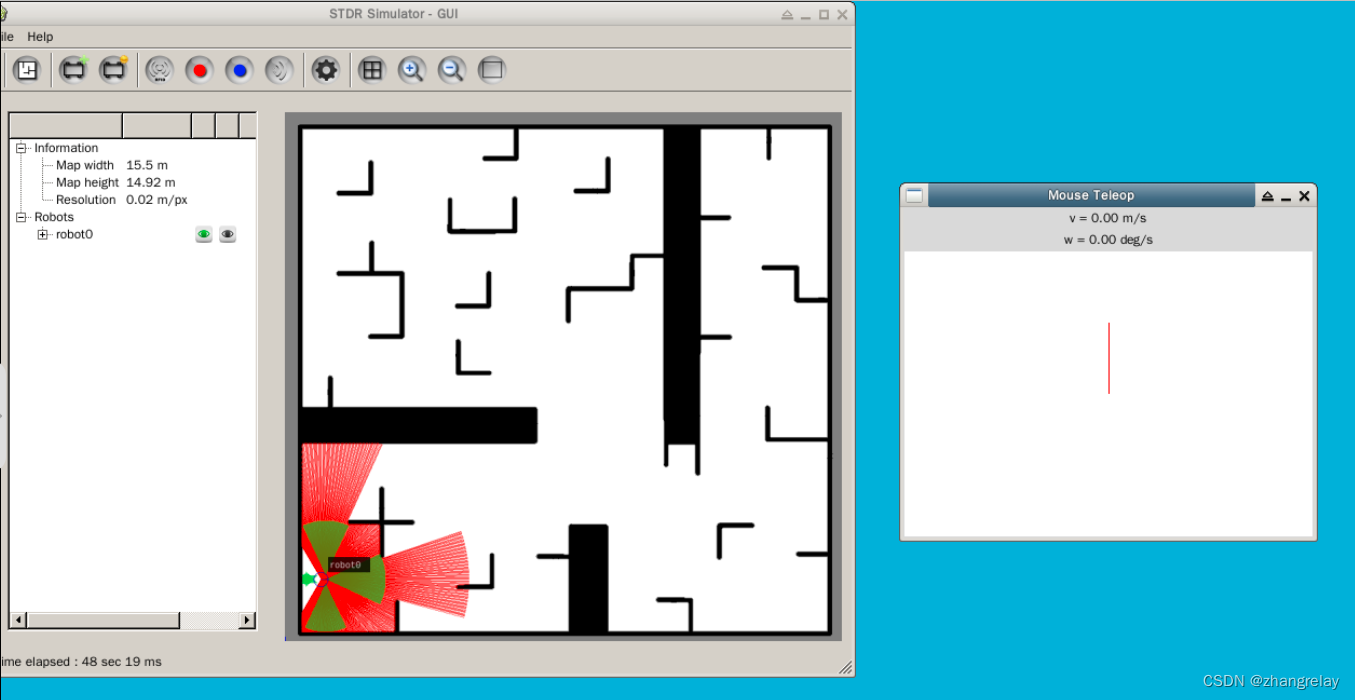
| Registros experimentales (70 puntos) Instale el controlador del mouse y el paquete de funciones de control remoto en ROS sudo apt install ros-kinetic-mouse-teleop Agregue la biblioteca de software relacionada del control remoto del mouse. rosrun mouse_teleop mouse_teleop.py usa el paquete predeterminado :
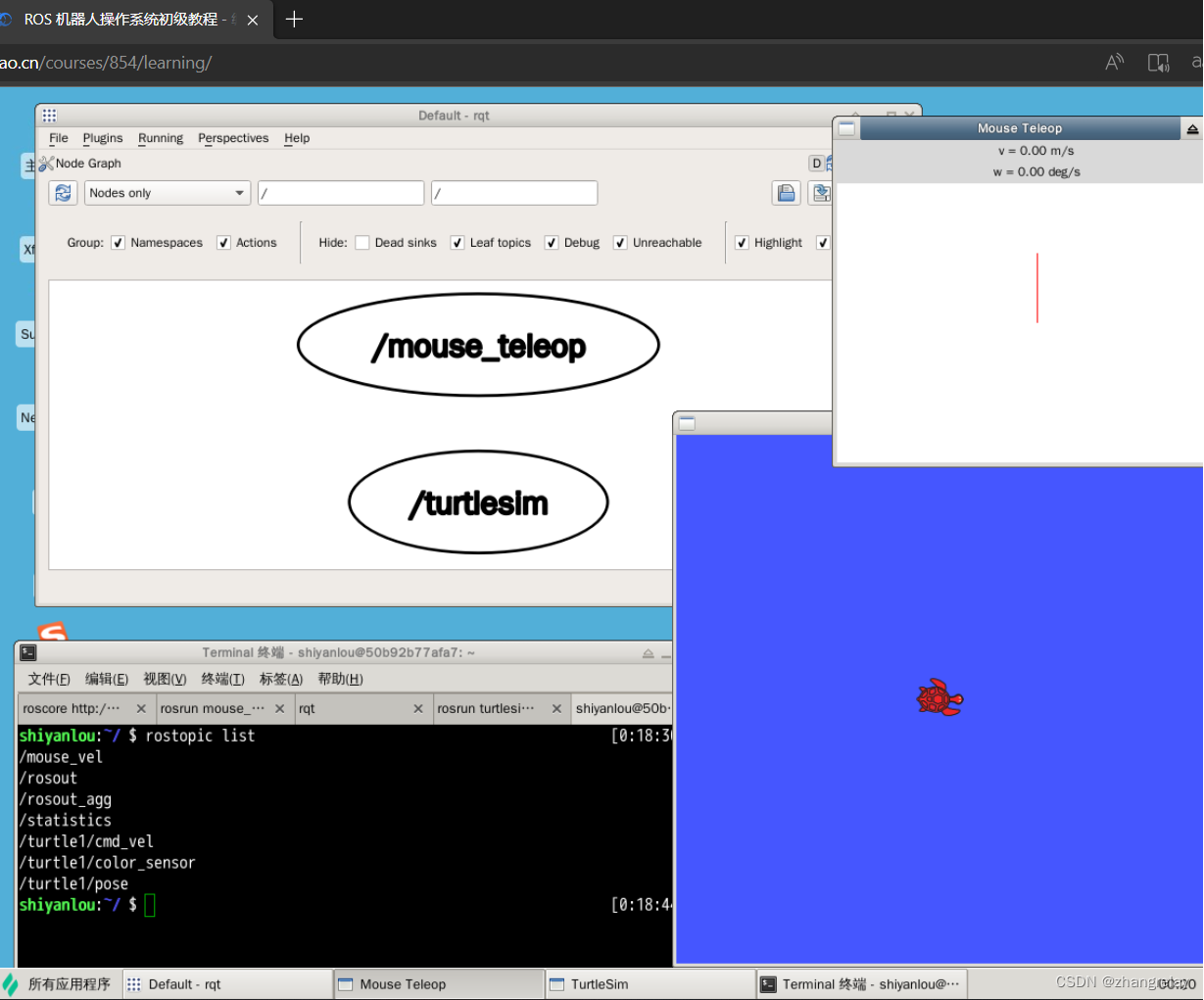
Ver los nodos utilizados (control remoto del mouse): Abre la ventana de la tortuguita: Encontrado el problema, los dos no están conectados:
Use la lista rostópica para encontrar que no hay un vínculo de comunicación entre los dos:
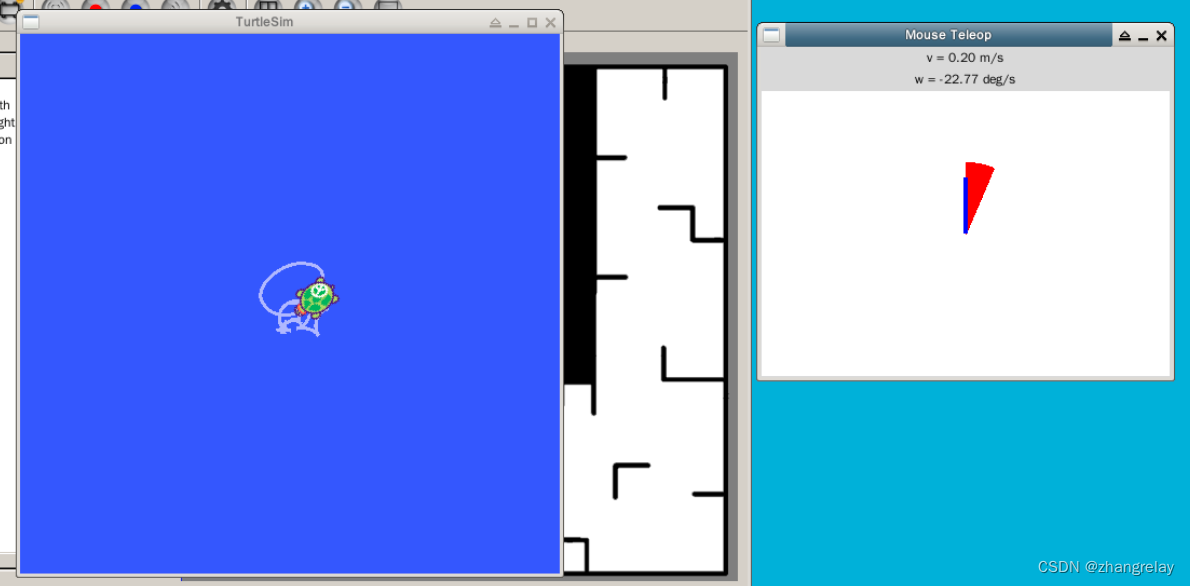
rosrun mouse_teleop mouse_teleop.py mouse_vel:=turtle1/cmd_vel Renómbrelo para establecer una conexión entre los dos:
Puedes controlar a distancia:
|
|||
| Preguntas de reflexión (30 puntos): Usa el gamepad para controlar a la pequeña tortuga Turtlesim: Instalación de paquetes relacionados identificación de hardware Ver y analizar datos de hardware Ver tipo de tema Mira los datos específicos de la noticia. Qué datos se necesitan para analizar la tortuguita Ejecuta la tortuguita: $rosrun tortugasim tortugasim_node Comprobar Nodo, la pequeña tortuga Nodo es /turtlesim lista de $rosnodos /rosout /tortugasim Ver la información específica de este nodo Ver tipo de tema Actualmente, se necesita un Nodo, que recibe el Tema /joy, convierte los datos en él y envía /turtle1/cmd_vel para conectar los datos del identificador con los datos requeridos por la pequeña tortuga. |
|||


AI:
Blue Bridge Cloud Class ROS Robot Versión anterior Informe de experimento-07 Esquema periférico puede incluir lo siguiente:
- Introducir el concepto, clasificación y función de los periféricos, así como su papel e importancia en los sistemas robóticos.
- Enumere los periféricos comunes de los robots, como sensores, actuadores, controladores, etc., y presente brevemente sus funciones y características.
- 介绍如何与外设进行通信和交互,包括串口通信、蓝牙通信、Wi-Fi通信等。
- 演示如何通过ROS与外设进行通信和交互,包括创建ROS节点、发布和订阅话题、使用服务调用等。
- 介绍外设的驱动程序和接口,例如Linux系统下的设备文件接口、Windows系统下的驱动程序等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设大纲的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。
蓝桥云课ROS机器人旧版实验报告-07外设进阶实验可能包括以下内容:
- 深入了解外设的接口和协议,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- 演示如何通过编程语言和库,例如Python、C++等,与外设进行通信和交互。
- 介绍外设的驱动程序和API,例如Linux系统下的设备文件接口API、Windows系统下的驱动程序API等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
- 介绍外设的拓展和升级,例如增加传感器、更换控制器等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设进阶实验的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
蓝桥云课ROS机器人旧版实验报告-07外设注意事项可能包括以下内容:
- 安全问题:在使用外设时,需要注意安全问题,例如避免短路、过流、过压等危险情况。
- 硬件兼容性:选择外设时,需要注意与机器人的硬件兼容性,例如接口类型、通信协议等。
- 软件兼容性:选择外设时,需要注意与机器人的软件兼容性,例如ROS版本、驱动程序等。
- 数据格式:与外设进行通信和交互时,需要注意数据格式的正确性,例如数据类型、字节序、协议等。
- 通信稳定性:与外设进行通信和交互时,需要注意通信的稳定性,例如避免信号干扰、数据丢失等问题。
- 驱动程序安装:安装外设的驱动程序时,需要注意操作系统的类型和版本,以及驱动程序的兼容性。
- 数据安全:在使用外设进行数据采集和控制时,需要注意数据的安全性,例如数据加密、权限设置等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设注意事项的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的使用方法和注意事项,确保实验的顺利进行。
蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结可能包括以下内容:
- 外设是机器人系统中重要的组成部分,可以扩展机器人的功能和能力。
2.常见的机器人外设包括传感器、执行器、控制器等,需要了解它们的功能和特点。 - 与外设进行通信和交互需要了解通信协议和接口,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- ROS提供了一种统一的的外设交互方式,可以通过ROS节点、话题、服务等方式与外设进行通信和交互。
- 外设的驱动程序和接口是实现外设与机器人系统无缝集成的重要部分,需要了解和掌握。
- 通过编写ROS驱动程序,可以更好地实现对外设的控制和数据采集,提高机器人的智能和灵活性。
- 机器人与外设的交互方式包括手动控制、自动控制、远程控制等,需要根据具体应用场景选择合适的的方式。
以上是蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
python
#!/usr/bin/env python |
|
import rospy |
|
from std_msgs.msg import String |
|
def callback(data): |
|
# 在这里处理鼠标事件 |
|
rospy.loginfo(rospy.get_caller_id() + "Received mouse button %s", data.data) |
|
def listener(): |
|
rospy.init_node('mouse_listener', anonymous=True) |
|
rospy.Subscriber("mouse/click", String, callback) |
|
rospy.spin() |
|
if __name__ == '__main__': |
|
listener() |
这个示例代码创建了一个ROS节点,订阅了名为“mouse/click”的ROS话题,并在回调函数中处理鼠标事件。在这个示例中,回调函数只是简单地记录了接收到的鼠标按钮事件。你可以根据自己的需要修改回调函数来执行其他操作,例如控制机器人的移动或执行其他任务。
要使用此代码,请将其保存到一个名为“mouse_listener.py”的文件中,并将其放置在1云课ROS机器人的工作目录中。然后,使用以下命令启动ROS节点:
bash
rosrun mouse_listener mouse_listener.py |
然后,你可以使用一个ROS驱动程序(例如Gazebo)模拟机器人,并在模拟器中模拟鼠标事件。例如,可以使用以下命令向“mouse/click”话题发送一个字符串消息:
bash
rosrun rqt_console rqt_console |
在rqt_console中,可以输入以下命令来发布一个字符串消息:
rostopic pub mouse/click std_msgs/String "data: 'button1'" |
这将在“mouse/click”话题上发布一个字符串消息,其中包含“button1”。在运行“mouse_listener”节点的同时,你可以在另一个终端中运行此命令来模拟鼠标事件。