0 1 Describa brevemente los componentes básicos de ADCU (control de dominio)?
MCU, SOC, deserializador, transceptor CAN, conmutador de red, chip de módulo de administración de energía PMIC, etc.
0 2 ¿Cuál es la diferencia entre MCU y SOC? ¿Cuáles son los principales escenarios de aplicación?
-
MCU es el chip de control principal, y el chip MCU tradicional se usa principalmente para el chip de control principal en los dominios que no requieren una alta potencia informática, como el dominio del chasis y el dominio del cuerpo;
-
SOC es un chip informático que integra CPU, GPU de procesamiento de imágenes, DSP de procesamiento de audio, NPU de unidad de aceleración de aprendizaje profundo, memoria y varias interfaces de E/S.
Teniendo en cuenta que el dominio de cabina inteligente y el dominio de conducción inteligente tienen requisitos extremadamente altos en cuanto a potencia informática y seguridad, el chip de control principal del controlador generalmente elige el chip SOC para usarse junto con el chip MCU.
0 3 Describa brevemente el proceso de implementación del software de control de dominio ADAS.
El sistema de software del controlador se compone del sistema operativo inferior, el software de capa intermedia y el software de aplicación de capa superior.
Entre ellos, el sistema operativo subyacente y el software de capa intermedia son proporcionados principalmente por fabricantes de controladores de dominio o proveedores de plataformas de software. La capa de aplicación superior tiene un mayor grado de libertad, que puede ser desarrollada por el propio OEM o encargada por una empresa externa.
Finalmente, toda la capa de software se integra y graba en el hardware del controlador de dominio.Después de la adaptación y calibración con todo el vehículo, las funciones y escenarios de conducción inteligente se pueden realizar en el lado del vehículo.
0 4 ¿Cómo se calcula el TTC?
0 5 ¿Cuáles son los requisitos de desempeño de la salida del radar?
1. La identificación del objetivo debe permanecer estable.
①El mismo objetivo solo debe tener una identificación;
②Cuando el objetivo está dentro del campo de visión sin interferencia de oclusión, se debe mantener la misma ID sin saltar, ya sea que cambie de estático a dinámico o de dinámico a estático.
2. La salida de la posición del objetivo debe ser consistente con el movimiento real del objetivo, y no debe haber situaciones anormales como saltos y pérdidas de posición.
3. Cuando el vehículo propio pasa a través de obstáculos como vehículos estacionados al borde de la carretera, paredes, barandillas, macizos de flores, etc., el radar no debe producir imágenes fantasma y es necesario garantizar un seguimiento estable y preciso de otros objetivos en movimiento. .
4. Cuando el radar frontal detecta objetivos dinámicos, se requiere que el error de distancia no supere los ± 0,4 m en el modo de larga distancia, no supere los ± 0,1 m en el modo de corta distancia y el error de velocidad no supere los ± 0,1 km/h Para la detección de radar de ángulo, se requiere que el error de distancia no supere los ±0,25 m y el error de velocidad no supere los ±0,18 kph.
5. La distancia de error de salida entre la posición del centro del objetivo y la posición del centro geométrico del objetivo real no supera los ±0,1 m, y la distancia larga no supera los ±0,25 m.
0 6 Cuando la cámara frontal detecta un objetivo dinámico durante la prueba, ¿cuál es el requisito de precisión de medición del dispositivo de adquisición?

0 7 ¿Cuáles son las condiciones inhibitorias comunes de AEB?
Exceso de velocidad del vehículo: Cuando la velocidad del vehículo supera un cierto valor, el sistema AEB puede inhibirse para evitar frenazos bruscos al circular a alta velocidad, provocando situaciones de peligro.
Obstáculos demasiado lejos: Los sistemas AEB pueden inhibirse cuando los obstáculos están demasiado lejos del vehículo, ya que en este caso no es necesario frenar.
No se pueden reconocer los obstáculos: cuando la forma, el tamaño o el color del obstáculo no son fáciles de reconocer, se puede suprimir el sistema AEB para evitar medidas de frenado innecesarias si se reconoce erróneamente como un obstáculo.
Falla del sensor: cuando un sensor del sistema AEB falla o falla, el sistema AEB puede inhibirse.
Observaciones: Las condiciones de supresión del sistema AEB las establece el OEM y pueden ser diferentes, por lo que al usar el sistema AEB, debe probarse de acuerdo con los requisitos.
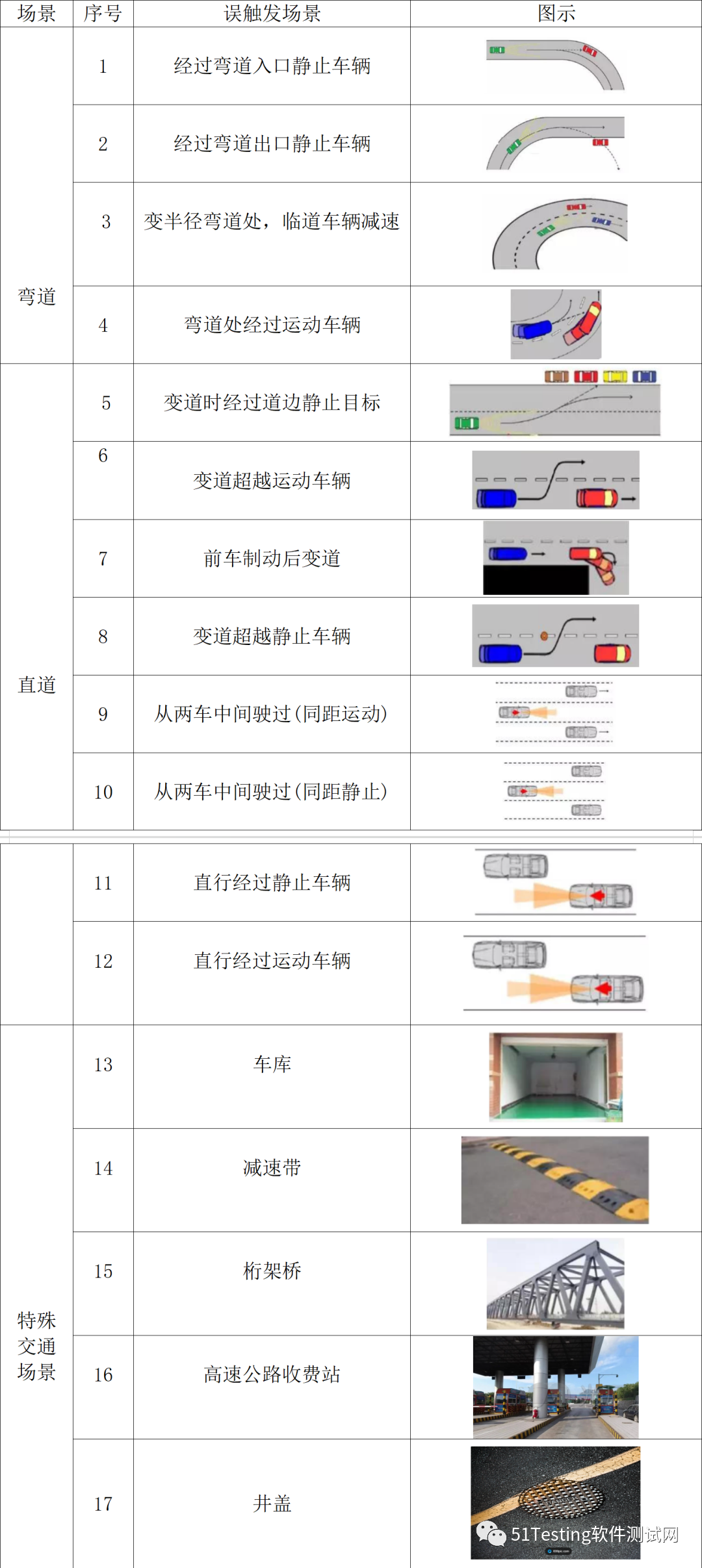
0 8 ¿Cuáles son los escenarios en los que AEB se activa falsamente?
0 9 ¿Cuál es la diferencia entre MIL/SIL/HIL en la fase de prueba?
Si el objeto bajo prueba es solo un algoritmo en la etapa de desarrollo, entonces solo se puede usar MIL/SIL; si el objeto bajo prueba es un controlador que se usará en un vehículo real, es posible que se requiera un conjunto de equipos HIL para probar en avance para encontrar problemas por adelantado.
comunicación
0 1 ¿Cuáles son los dos mecanismos de comunicación de ros?
-
mecanismo de publicación-suscripción entre nodos;
-
Mecanismo de solicitud-respuesta cliente-servidor.
0 2 ¿A qué capa pertenece la UDS? ¿Cómo se transfieren los datos?
El servicio de diagnóstico UDS se encuentra en la capa de aplicación, y la capa de red está debajo de la capa de aplicación, por lo que los datos de diagnóstico se envían desde la capa de aplicación a la capa de red, y la red desempaqueta, empaqueta y transmite los datos. capa.
relacionado con la lata
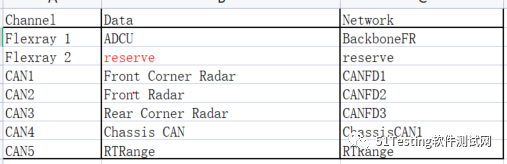
¿ Cuáles son los canales CAN comúnmente utilizados en la prueba 0 1 ? ¿Cómo se mapean los canales lógicos y los canales físicos?
Ejemplo: fijado según el estándar unificado.
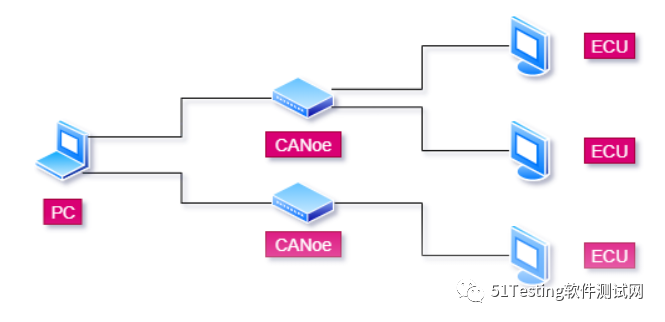
0 2 ¿Cómo conectar CANoe, cómo conectar con ECU, qué tipo de interfaz? ¿Qué ECU deben conectarse durante la prueba?
La ECU generalmente conduce desde el automóvil, incluido el CAN del chasis, el CAN del cuerpo, FlexRay, el radar, etc., a CANoe, y CANoe está conectado a la computadora. La interfaz suele ser la cabeza de DB9 o el conector extraído del OBD en el automóvil. .
0 3 ¿Cuál es la diferencia entre seguridad activa y seguridad pasiva?¿Cuáles son los dispositivos?
La seguridad pasiva se refiere a los dispositivos de seguridad que pueden minimizar las lesiones personales después de un accidente de tráfico. La seguridad pasiva no puede prevenir o evitar accidentes, pero puede minimizar las lesiones personales cuando ocurre un accidente. Los dispositivos comunes de seguridad pasiva incluyen bolsas de aire y cinturones de seguridad.
La seguridad pasiva no es suficiente para la seguridad del automóvil. Con el fin de prevenir/evitar/reducir la ocurrencia de accidentes de seguridad en la medida de lo posible,
Una serie de diseños de seguridad adoptados en los automóviles para prevenir accidentes se denominan diseños de seguridad activa. La seguridad activa consiste principalmente en prevenir los problemas antes de que sucedan, y trabajar antes de los accidentes para reducir los accidentes. Por ejemplo, el sistema de frenos antibloqueo ABS evita que el automóvil se trabe y patine; el sistema electrónico de estabilidad ESP hace que el automóvil sea más estable al correr y girar.
calibración
0 1 ¿Cuál es la diferencia entre referencia interna y referencia externa?
La referencia interna se refiere a las propiedades inherentes del propio sensor, como la distancia focal de la cámara y la distorsión del objetivo.
Los parámetros externos se utilizan principalmente para unificar el sistema de coordenadas entre diferentes sensores (Cámara, Lidar, Radar) del vehículo.
0 2 ¿Los parámetros internos y externos necesitan ser calibrados por sí mismos?
Por lo general, solo se requiere la referencia externa y el proveedor calibra la referencia interna.
recopilación de datos
0 1 ¿Cuántos autos tiene Datalogging? ¿Cuánto kilometraje se acumula en un solo día? ¿Cuánto dura el ciclo de recolección?
Ejemplo: 3 vehículos de recolección, 300-400 km/vehículo de recolección por día, y el período de recolección es de aproximadamente 3 meses.
0 2 ¿Qué escenas cubre la colección?
-
Período de tiempo: día, tarde, noche;
-
Clima: soleado, nublado, lluvioso y con nieve;
-
Vehículos: camiones grandes, vehículos de ingeniería, autobuses, automóviles, SUV, camionetas, motocicletas, vehículos de trabajo, vehículos de accidentes, vehículos de forma especial;
-
UVV: peatones, niños, ciclistas;
-
Escenarios clave: túneles, puentes, rampas, curvas de gran curvatura, rampas y carreteras elevadas.
0 3 ¿Cuál es la diferencia entre la cámara de vista lateral y la cámara de vista envolvente para recolección?
Ejemplo: desde un punto de vista funcional, las lentes de ojo de pez se distribuyen en las cuatro direcciones de la carrocería del automóvil, delantera, trasera, izquierda y derecha, y se utilizan principalmente para escenas de estacionamiento.
La cámara de visión lateral se divide en vista frontal izquierda/vista frontal derecha/vista trasera izquierda/vista trasera derecha, que se utilizan principalmente para funciones de asistencia a la conducción, como DOW, LCA, etc.
Finalmente: El video tutorial de prueba de software completo a continuación ha sido organizado y cargado, y los amigos que lo necesiten pueden obtenerlo por sí mismos [Garantizado 100% gratis]

Documentación de la entrevista de prueba de software
Debemos estudiar para encontrar un trabajo bien remunerado. Las siguientes preguntas de la entrevista son los materiales de entrevista más recientes de empresas de Internet de primer nivel como Ali, Tencent y Byte, y algunos jefes de Byte han dado respuestas autorizadas. Termine este conjunto Los materiales de la entrevista creen que todo el mundo puede encontrar un trabajo satisfactorio.

