1.3.4 LDW system function definition
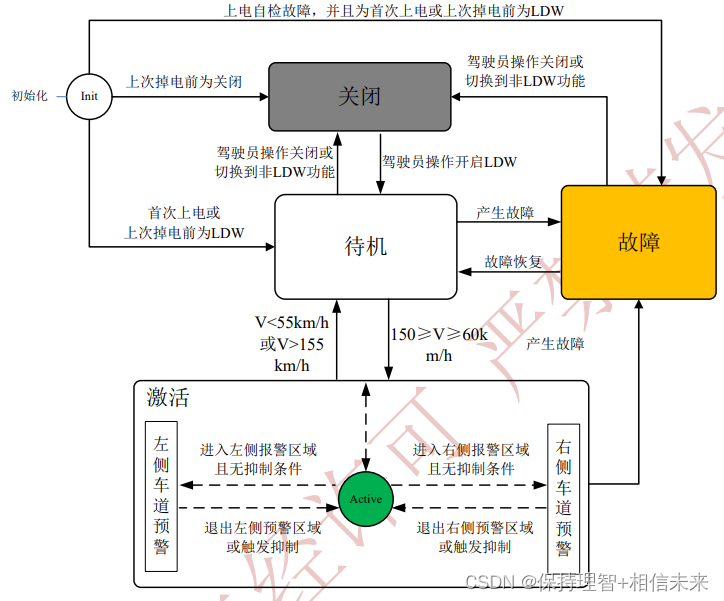
1.3.4.1 State Machine
1.3.4.2 Function definition
1.3.4.2.1 List of Signal Requirements
1.3.4.2.2 System on and off
1) Initialization
After the vehicle is powered on, the Lane Departure Warning System (LDW) is initialized. The controller needs to send the first frame message within 220ms after power-on, and complete the internal self-inspection within 3s. At the same time, no related system detection is performed within 3s after power-on (Within 3 seconds after power-on, no related system failure will be reported, no related system fault code will be recorded).
Internal self-inspection of the lane departure warning system: After the self-inspection is completed, if the front smart camera or forward millimeter-wave radar is detected, the lane departure warning system cannot be supported. At this time, if the LDW function is off before the last power-off (FC_LASModeSelectionStatus =0x7: off), keep the LDW system status as off (FC_LDWStatus=0x0: off), if the LDW is on before the last power-off or the system is powered on for the first time (FC_LASModeSelectionStatus=0x1: LDW), then send the lane departure warning system status It is a failure status ( FC_LDWStatus=0x3 : Failure), and the instrument will display according to the system status. When the self-test is complete and there is no fault, the LDW switches to the corresponding system state according to the state before the last power-off (0x0:off or 0x1:stan