1. 센서 구동 및 초기화
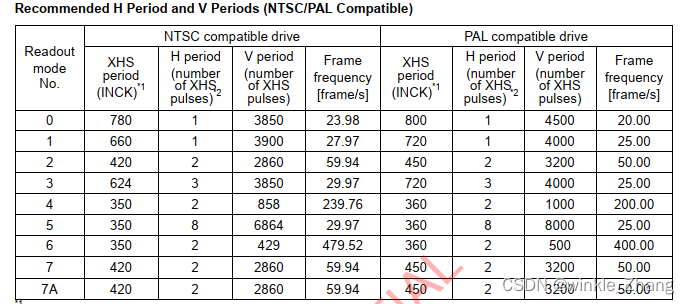
(1) 외부 클럭 타이밍: 일반적으로 센서는 마스터 모드와 슬레이브 모드가 있으며 주요 차이점은 외부에서 INCK 및 XHS, XVS 동기화 클럭 및 신호를 제공해야 하는지 여부입니다. 마스터 모드, 슬레이브 이 모드에서 FPGA는 설명서에 따라 특정 주파수 INCK 클록 신호와 XHS, XVS 동기화 신호를 제공해야 합니다.
예를 들어, IMX274 SENSOR는 모드 2 모드, NTSC 형식 비디오 출력에서 작동하고 하나의 XHS 주기에는 520 INCK 주기 신호가 필요하며 각 XVS 주기에는 2310 및 XHS 신호가 포함됩니다.
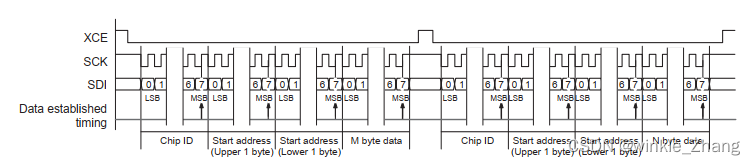
(2) 레지스터 구성: 전원이 켜진 후 FPGA는 센서 레지스터를 초기화해야 합니다. 일반적으로 초기화 데이터는 IIC 또는 SPI 프로토콜을 통해 특정 주소에 기록됩니다. IMX274 및 IMX118 모두 SPI를 통해 구성됩니다. 주소 및 데이터 설명서에서 요구하는 쓰기 형식에 따라 칩 ID, 상위 8비트 주소, 하위 8비트 주소 및 기록된 데이터 매개변수(chipID, 상위 1byte, 하위 1byte, N byte 데이터) 구성 타이밍 다음과 같다:
2. 데이터 역직렬화 처리
센서가 출력하는 데이터는 직렬 신호이며 신호를 역직렬화해야 합니다. 역직렬화는 주로 xilinx의 IDELAYE2 및 ISERDESE2 기능 프리미티브를 사용합니다.직렬 신호는 IDELAYE2에 의해 데이터와 클록이 정렬된 후 역직렬화를 위해 ISERDESE2에 입력됩니다.역직렬화 정렬 과정에서 핵심은 비트슬립 신호 및 요인 신호를 이해하는 것입니다.그들은 동기 신호와 데이터 역직렬화에 대한 특정 제약 조건을 찾기 위해 각각 Shifting을 사용했습니다.
3. 다채널 센서의 데이터 정렬 및 통일 여러
센서를 동시에 구동하여 데이터를 처리할 때 처리가 용이하도록 여러 데이터를 정렬해야 합니다.
데이터 정렬 모듈의 원리 는 여러 세트 의 센서 데이터를 fifo에 쓰고 특정 타이밍에 판독하는 것 입니다
. 업데이트 6. GT 데이터 분석 및 센서 역제어 업데이트 예정