El modo de predicción del ISP divide principalmente el bloque actual en múltiples sub-bloques, y la señal reconstruida de cada sub-bloque puede usarse para generar el valor predicho del siguiente sub-bloque. Los modos de predicción de todos los sub-bloques son los mismos y solo pueden ser el modo PLANAR o el modo DC o el modo intraángulo.
La selección del modo de intra predicción se realiza principalmente en la función estIntraPredLumaQT , y la selección del modo ISP también está en esta función La selección del modo ISP solo se realizará cuando cu.lfnstIdx = 0. El siguiente es un proceso de selección aproximado del modo ISP:
Uno, inicialización
1. Inicialice el número de particiones horizontales y verticales después de la división del ISP de acuerdo con el tamaño de CU actual
2. De acuerdo con si el tamaño de la TU después de la división CU actual cumple con la condición de uso de LFNST (función CU :: canUseLfnstWithISP ), decida si omite la verificación de la combinación del método de división y el LFNST.
if( testISP )
{
//reset the variables used for the tests
//重置ISP测试用到的变量
m_regIntraRDListWithCosts.clear();
int numTotalPartsHor = (int)width >> floorLog2(CU::getISPSplitDim(width, height, TU_1D_VERT_SPLIT));//水平划分所得分区数
int numTotalPartsVer = (int)height >> floorLog2(CU::getISPSplitDim(width, height, TU_1D_HORZ_SPLIT));//垂直划分所得分区数
m_ispTestedModes[0].init( numTotalPartsHor, numTotalPartsVer );//初始化LfnstIdx为0时ISP测试数据
//the total number of subpartitions is modified to take into account the cases where LFNST cannot be combined with ISP due to size restrictions
//修改子分区的总数以考虑由于大小限制而无法将LFNST与ISP组合的情况。
numTotalPartsHor = sps.getUseLFNST() && CU::canUseLfnstWithISP(cu.Y(), HOR_INTRA_SUBPARTITIONS) ? numTotalPartsHor : 0;
numTotalPartsVer = sps.getUseLFNST() && CU::canUseLfnstWithISP(cu.Y(), VER_INTRA_SUBPARTITIONS) ? numTotalPartsVer : 0;
for (int j = 1; j < NUM_LFNST_NUM_PER_SET; j++)
{
m_ispTestedModes[j].init(numTotalPartsHor, numTotalPartsVer);
}
}2. Agregue el modo ISP a la lista de modos
Antes de que la función estIntraPredLumaQT realice la selección fina de Costo RD, el modo ISP inicializado se agrega a la lista de modos candidatos.
if ( testISP )
{
// we reserve positions for ISP in the common full RD list
// 我们为ISP在通用的完整RD列表中保留位置
const int maxNumRDModesISP = sps.getUseLFNST() ? 16 * NUM_LFNST_NUM_PER_SET : 16;
m_curIspLfnstIdx = 0;
for (int i = 0; i < maxNumRDModesISP; i++)
{
uiRdModeList.push_back( ModeInfo( false, false, 0, INTRA_SUBPARTITIONS_RESERVED, 0 ) );
}
}3. Prepare una lista de modos candidatos utilizados por ISP
Cuando la función estIntraPredLumaQT realiza la tercera ronda de selección fina de Costo RD, después de atravesar el modo de ángulo intracuadro normal y el modo MIP, se inicia el cruce del modo ISP.
Al atravesar el modo ISP por primera vez, debe preparar la lista de candidatos del modo intracuadro para la prueba de costo RD para el modo ISP. Aquí se utiliza la lista m_regIntraRDListWithCosts, que contiene principalmente los modos de ángulo intracuadro habituales incluidos en la tercera ronda de selección fina de coste RD. Primero, ordene la lista y seleccione el mejor modo intraángulo bestNormalIntraAngle.
Luego agregue el modo PLANAR, el mejor modo intraángulo, el resto de la lista m_regIntraRDListWithCosts (excepto el modo DC) y el modo DC a la lista del modo de división horizontal y la lista del modo de división vertical.
//It prepares the list of potential intra modes candidates that will be tested using RD costs
//该函数用来准备使用RD Cost测试的潜在帧内模式候选列表
bool IntraSearch::xSortISPCandList(double bestCostSoFar, double bestNonISPCost, ModeInfo bestNonISPMode)
{
int bestISPModeInRelCU = -1;
m_modeCtrl->setStopNonDCT2Transforms(false);
//ISP快速算法
if (m_pcEncCfg->getUseFastISP())
{
//we check if the ISP tests can be cancelled
//我们检查ISP测试是否可以取消
double thSkipISP = 1.4;
if (bestNonISPCost > bestCostSoFar * thSkipISP)
{ //如果bestNonISPCost > bestCostSoFar * thSkipISP则不再对ISP进行测试
for (int splitIdx = 0; splitIdx < NUM_INTRA_SUBPARTITIONS_MODES - 1; splitIdx++)
{
for (int j = 0; j < NUM_LFNST_NUM_PER_SET; j++)
{
m_ispTestedModes[j].splitIsFinished[splitIdx] = true;
}
}
return false;
}
if (!updateISPStatusFromRelCU(bestNonISPCost, bestNonISPMode, bestISPModeInRelCU))
{ //根据相关CU的信息更新当前ISP状态
return false;
}
}
for (int k = 0; k < m_ispCandListHor.size(); k++)
{
m_ispCandListHor.at(k).ispMod = HOR_INTRA_SUBPARTITIONS; //we set the correct ISP split type value 设置正确的ISP划分类型
}
auto origHadList = m_ispCandListHor; // save the original hadamard list of regular intra 保存常规帧内模式的原始hadamard列表
bool modeIsInList[NUM_LUMA_MODE] = { false };
m_ispCandListHor.clear();
m_ispCandListVer.clear();
// we sort the normal intra modes according to their full RD costs
// 我们根据它们的RD Costs对常规帧内模式进行排序
std::sort(m_regIntraRDListWithCosts.begin(), m_regIntraRDListWithCosts.end(), ModeInfoWithCost::compareModeInfoWithCost);
// we get the best angle from the regular intra list
// 我们从常规帧内模式列表中得到最佳预测角度模式
int bestNormalIntraAngle = -1;
for (int modeIdx = 0; modeIdx < m_regIntraRDListWithCosts.size(); modeIdx++)
{
if (bestNormalIntraAngle == -1 && m_regIntraRDListWithCosts.at(modeIdx).modeId > DC_IDX)
{
bestNormalIntraAngle = m_regIntraRDListWithCosts.at(modeIdx).modeId;
break;
}
}
int mode1 = PLANAR_IDX;
int mode2 = bestNormalIntraAngle;
ModeInfo refMode = origHadList.at(0);
auto* destListPtr = &m_ispCandListHor;
//List creation
if (m_pcEncCfg->getUseFastISP() && bestISPModeInRelCU != -1) //RelCU intra mode
{ //将相关CU的最佳ISP模式加入到候选列表中
destListPtr->push_back(ModeInfo(refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, bestISPModeInRelCU));
modeIsInList[bestISPModeInRelCU] = true;
}
// Planar
if (!modeIsInList[mode1])
{
destListPtr->push_back(ModeInfo(refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, mode1));
modeIsInList[mode1] = true;
}
// Best angle in regular intra
if (mode2 != -1 && !modeIsInList[mode2])
{
destListPtr->push_back(ModeInfo(refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, mode2));
modeIsInList[mode2] = true;
}
// Remaining regular intra modes that were full RD tested (except DC, which is added after the angles from regular intra)
// 其余的进行完全RD测试的常规帧内模式(除了DC,它是在常规帧内角度模式之后添加的)
int dcModeIndex = -1;
for (int remModeIdx = 0; remModeIdx < m_regIntraRDListWithCosts.size(); remModeIdx++)
{
int currentMode = m_regIntraRDListWithCosts.at(remModeIdx).modeId;
if (currentMode != mode1 && currentMode != mode2 && !modeIsInList[currentMode])
{ //如果当前模式不是Planar模式且不是最佳角度模式且不在模式列表中
if (currentMode > DC_IDX)
{
destListPtr->push_back(ModeInfo(refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, currentMode));
modeIsInList[currentMode] = true;
}
else if (currentMode == DC_IDX)
{
dcModeIndex = remModeIdx;
}
}
}
// DC is added after the angles from regular intra
// 在与常规帧内角度模式之后添加DC
if (dcModeIndex != -1 && !modeIsInList[DC_IDX])
{
destListPtr->push_back(ModeInfo(refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, DC_IDX));
modeIsInList[DC_IDX] = true;
}
// We add extra candidates to the list that will only be tested if ISP is likely to win
// 我们在列表中添加了额外的候选模式,只有在ISP可能胜出的情况下才会进行测试
for (int j = 0; j < NUM_LFNST_NUM_PER_SET; j++)
{
m_ispTestedModes[j].numOrigModesToTest = (int)destListPtr->size();
}
const int addedModesFromHadList = 3;//从hadamard列表添加的模式数
int newModesAdded = 0;
for (int k = 0; k < origHadList.size(); k++)
{
if (newModesAdded == addedModesFromHadList)
{
break;
}
if (!modeIsInList[origHadList.at(k).modeId])
{
destListPtr->push_back( ModeInfo( refMode.mipFlg, refMode.mipTrFlg, refMode.mRefId, refMode.ispMod, origHadList.at(k).modeId ) );
newModesAdded++;
}
}
if (m_pcEncCfg->getUseFastISP() && bestISPModeInRelCU != -1)
{
destListPtr->resize(1);
}
// Copy modes to other split-type list
// 将模式复制到其他划分类型列表
m_ispCandListVer = m_ispCandListHor;
for (int i = 0; i < m_ispCandListVer.size(); i++)
{
m_ispCandListVer[i].ispMod = VER_INTRA_SUBPARTITIONS;
}
// Reset the tested modes information to 0
// 将测试模式信息重置为0
for (int j = 0; j < NUM_LFNST_NUM_PER_SET; j++)
{
for (int i = 0; i < m_ispCandListHor.size(); i++)
{
m_ispTestedModes[j].clearISPModeInfo(m_ispCandListHor[i].modeId);
}
}
return true;
}Cuarto, seleccione el costo RD del modo ISP
Llamando a la función: xGetNextISPMode para determinar qué modo de división de ISP y modo de predicción se pueden usar en combinación para una prueba de costo RD completa.
Hay muchos algoritmos rápidos involucrados aquí, y muchos lugares que no entiendo ...
// It decides which modes from the ISP lists can be full RD tested
// 它决定了ISP列表中的哪些模式可以进行完整的RD测试
void IntraSearch::xGetNextISPMode(ModeInfo& modeInfo, const ModeInfo* lastMode, const Size cuSize)
{
static_vector<ModeInfo, FAST_UDI_MAX_RDMODE_NUM>* rdModeLists[2] = { &m_ispCandListHor, &m_ispCandListVer };
const int curIspLfnstIdx = m_curIspLfnstIdx;
if (curIspLfnstIdx >= NUM_LFNST_NUM_PER_SET)
{
//All lfnst indices have been checked
//所有lfnst索引均已检查
return;
}
ISPType nextISPcandSplitType;
auto& ispTestedModes = m_ispTestedModes[curIspLfnstIdx];
//是否已经完成水平和垂直划分
const bool horSplitIsTerminated = ispTestedModes.splitIsFinished[HOR_INTRA_SUBPARTITIONS - 1];
const bool verSplitIsTerminated = ispTestedModes.splitIsFinished[VER_INTRA_SUBPARTITIONS - 1];
if (!horSplitIsTerminated && !verSplitIsTerminated)//如果既没有进行水平划分也没有进行垂直划分
{
nextISPcandSplitType = !lastMode ? HOR_INTRA_SUBPARTITIONS : lastMode->ispMod == HOR_INTRA_SUBPARTITIONS ? VER_INTRA_SUBPARTITIONS : HOR_INTRA_SUBPARTITIONS;
}
else if (!horSplitIsTerminated && verSplitIsTerminated)//如果已经进行垂直划分且没有进行水平划分
{
nextISPcandSplitType = HOR_INTRA_SUBPARTITIONS;
}
else if (horSplitIsTerminated && !verSplitIsTerminated)//如果已经进行水平划分且没有进行垂直划分
{
nextISPcandSplitType = VER_INTRA_SUBPARTITIONS;
}
else//水平和垂直划分都已经进行完
{
xFinishISPModes();
return; // no more modes will be tested 不再测试模式
}
int maxNumSubPartitions = ispTestedModes.numTotalParts[nextISPcandSplitType - 1];//最大分区数
// We try to break the split here for lfnst > 0 according to the first mode
// 根据第一种模式,我们尝试在这里打破lfnst>0的划分
if (curIspLfnstIdx > 0 && ispTestedModes.numTestedModes[nextISPcandSplitType - 1] == 1)
{
int firstModeThisSplit = ispTestedModes.getTestedIntraMode(nextISPcandSplitType, 0);
int numSubPartsFirstModeThisSplit = ispTestedModes.getNumCompletedSubParts(nextISPcandSplitType, firstModeThisSplit);
CHECK(numSubPartsFirstModeThisSplit < 0, "wrong number of subpartitions!");
bool stopThisSplit = false;
bool stopThisSplitAllLfnsts = false;
if (numSubPartsFirstModeThisSplit < maxNumSubPartitions)
{
stopThisSplit = true;
if (m_pcEncCfg->getUseFastISP() && curIspLfnstIdx == 1 && numSubPartsFirstModeThisSplit < maxNumSubPartitions - 1)
{
stopThisSplitAllLfnsts = true;
}
}
if (stopThisSplit)
{
ispTestedModes.splitIsFinished[nextISPcandSplitType - 1] = true;
if (curIspLfnstIdx == 1 && stopThisSplitAllLfnsts)
{
m_ispTestedModes[2].splitIsFinished[nextISPcandSplitType - 1] = true;
}
return;
}
}
// We try to break the split here for lfnst = 0 or all lfnst indices according to the first two modes
// 根据前两种模式,我们尝试在这里打破lfnst=0或所有lfnst索引的划分
if (curIspLfnstIdx == 0 && ispTestedModes.numTestedModes[nextISPcandSplitType - 1] == 2)
{
// Split stop criteria after checking the performance of previously tested intra modes
// 检查之前测试的帧内模式性能后的划分停止标准
const int thresholdSplit1 = maxNumSubPartitions;
bool stopThisSplit = false;
bool stopThisSplitForAllLFNSTs = false;
const int thresholdSplit1ForAllLFNSTs = maxNumSubPartitions - 1;
int mode1 = ispTestedModes.getTestedIntraMode((ISPType)nextISPcandSplitType, 0);
mode1 = mode1 == DC_IDX ? -1 : mode1;
int numSubPartsBestMode1 = mode1 != -1 ? ispTestedModes.getNumCompletedSubParts((ISPType)nextISPcandSplitType, mode1) : -1;
int mode2 = ispTestedModes.getTestedIntraMode((ISPType)nextISPcandSplitType, 1);
mode2 = mode2 == DC_IDX ? -1 : mode2;
int numSubPartsBestMode2 = mode2 != -1 ? ispTestedModes.getNumCompletedSubParts((ISPType)nextISPcandSplitType, mode2) : -1;
// 1) The 2 most promising modes do not reach a certain number of sub-partitions
// 1)最有前途的两种模式没有达到一定数量的子分区
if (numSubPartsBestMode1 != -1 && numSubPartsBestMode2 != -1)
{
if (numSubPartsBestMode1 < thresholdSplit1 && numSubPartsBestMode2 < thresholdSplit1)
{
stopThisSplit = true;
if (curIspLfnstIdx == 0 && numSubPartsBestMode1 < thresholdSplit1ForAllLFNSTs && numSubPartsBestMode2 < thresholdSplit1ForAllLFNSTs)
{
stopThisSplitForAllLFNSTs = true;
}
}
else
{
//we stop also if the cost is MAX_DOUBLE for both modes
//如果两种模式的成本都是MAX_DOUBLE,我们也会停止
double mode1Cost = ispTestedModes.getRDCost(nextISPcandSplitType, mode1);
double mode2Cost = ispTestedModes.getRDCost(nextISPcandSplitType, mode2);
if (!(mode1Cost < MAX_DOUBLE || mode2Cost < MAX_DOUBLE))
{
stopThisSplit = true;
}
}
}
if (!stopThisSplit)
{
// 2) One split type may be discarded by comparing the number of sub-partitions of the best angle modes of both splits
// 2)通过比较两个划分的最佳角度模式的子分区数,可以丢弃一个划分类型
ISPType otherSplit = nextISPcandSplitType == HOR_INTRA_SUBPARTITIONS ? VER_INTRA_SUBPARTITIONS : HOR_INTRA_SUBPARTITIONS;
int numSubPartsBestMode2OtherSplit = mode2 != -1 ? ispTestedModes.getNumCompletedSubParts(otherSplit, mode2) : -1;
if (numSubPartsBestMode2OtherSplit != -1 && numSubPartsBestMode2 != -1 && ispTestedModes.bestSplitSoFar != nextISPcandSplitType)
{
if (numSubPartsBestMode2OtherSplit > numSubPartsBestMode2)
{
stopThisSplit = true;
}
// both have the same number of subpartitions
// 两者都有相同数量的子部分
else if (numSubPartsBestMode2OtherSplit == numSubPartsBestMode2)
{
// both have the maximum number of subpartitions, so it compares RD costs to decide
// 两者都有最大数量的子划分,所以它比较RD Cost来决定
if (numSubPartsBestMode2OtherSplit == maxNumSubPartitions)
{
double rdCostBestMode2ThisSplit = ispTestedModes.getRDCost(nextISPcandSplitType, mode2);
double rdCostBestMode2OtherSplit = ispTestedModes.getRDCost(otherSplit, mode2);
double threshold = 1.3;
if (rdCostBestMode2ThisSplit == MAX_DOUBLE || rdCostBestMode2OtherSplit < rdCostBestMode2ThisSplit * threshold)
{
stopThisSplit = true;
}
}
else // none of them reached the maximum number of subpartitions with the best angle modes, so it compares the results with the the planar mode
{//它们都没有达到具有最佳角度模式的子分区的最大数目,所以它将结果和PLANAR模式进行了比较
int numSubPartsBestMode1OtherSplit = mode1 != -1 ? ispTestedModes.getNumCompletedSubParts(otherSplit, mode1) : -1;
if (numSubPartsBestMode1OtherSplit != -1 && numSubPartsBestMode1 != -1 && numSubPartsBestMode1OtherSplit > numSubPartsBestMode1)
{
stopThisSplit = true;
}
}
}
}
}
if (stopThisSplit) //如果停止这种划分
{
ispTestedModes.splitIsFinished[nextISPcandSplitType - 1] = true;
if (stopThisSplitForAllLFNSTs)
{
for (int lfnstIdx = 1; lfnstIdx < NUM_LFNST_NUM_PER_SET; lfnstIdx++)
{
m_ispTestedModes[lfnstIdx].splitIsFinished[nextISPcandSplitType - 1] = true;
}
}
return;
}
}
// Now a new mode is retrieved from the list and it has to be decided whether it should be tested or not
// 现在从列表中检索到一个新模式,必须决定是否应该测试它
if (ispTestedModes.candIndexInList[nextISPcandSplitType - 1] < rdModeLists[nextISPcandSplitType - 1]->size())
{
ModeInfo candidate = rdModeLists[nextISPcandSplitType - 1]->at(ispTestedModes.candIndexInList[nextISPcandSplitType - 1]);
ispTestedModes.candIndexInList[nextISPcandSplitType - 1]++;
// extra modes are only tested if ISP has won so far
// 只有当ISP目前为止赢了,才测试额外的模式
if (ispTestedModes.candIndexInList[nextISPcandSplitType - 1] > ispTestedModes.numOrigModesToTest)
{
if (ispTestedModes.bestSplitSoFar != candidate.ispMod || ispTestedModes.bestModeSoFar == PLANAR_IDX)
{
ispTestedModes.splitIsFinished[nextISPcandSplitType - 1] = true;
return;
}
}
bool testCandidate = true;
// we look for a reference mode that has already been tested within the window and decide to test the new one according to the reference mode costs
// 我们寻找一个已经在窗口中测试过的参考模式,并决定根据参考模式成本测试新的模式
if (maxNumSubPartitions > 2 && (curIspLfnstIdx > 0 || (candidate.modeId >= DC_IDX && ispTestedModes.numTestedModes[nextISPcandSplitType - 1] >= 2)))
{
int refLfnstIdx = -1;
const int angWindowSize = 5;
int numSubPartsLeftMode, numSubPartsRightMode, numSubPartsRefMode, leftIntraMode = -1, rightIntraMode = -1;
int windowSize = candidate.modeId > DC_IDX ? angWindowSize : 1;
int numSamples = cuSize.width << floorLog2(cuSize.height);
int numSubPartsLimit = numSamples >= 256 ? maxNumSubPartitions - 1 : 2;
xFindAlreadyTestedNearbyIntraModes(curIspLfnstIdx, (int)candidate.modeId, &refLfnstIdx, &leftIntraMode, &rightIntraMode, (ISPType)candidate.ispMod, windowSize);
if (refLfnstIdx != -1 && refLfnstIdx != curIspLfnstIdx)
{
CHECK(leftIntraMode != candidate.modeId || rightIntraMode != candidate.modeId, "wrong intra mode and lfnstIdx values!");
numSubPartsRefMode = m_ispTestedModes[refLfnstIdx].getNumCompletedSubParts((ISPType)candidate.ispMod, candidate.modeId);
CHECK(numSubPartsRefMode <= 0, "Wrong value of the number of subpartitions completed!");
}
else
{
numSubPartsLeftMode = leftIntraMode != -1 ? ispTestedModes.getNumCompletedSubParts((ISPType)candidate.ispMod, leftIntraMode) : -1;
numSubPartsRightMode = rightIntraMode != -1 ? ispTestedModes.getNumCompletedSubParts((ISPType)candidate.ispMod, rightIntraMode) : -1;
numSubPartsRefMode = std::max(numSubPartsLeftMode, numSubPartsRightMode);
}
if (numSubPartsRefMode > 0)
{
// The mode was found. Now we check the condition
testCandidate = numSubPartsRefMode > numSubPartsLimit;
}
}
if (testCandidate)
{
modeInfo = candidate;
}
}
else
{
//the end of the list was reached, so the split is invalidated
ispTestedModes.splitIsFinished[nextISPcandSplitType - 1] = true;
}
}
Cinco, divide
Después de elegir el modo de división del ISP (horizontal o vertical) y el modo de predicción, ingresará formalmente a la división, predicción, transformación del ISP, etc. La función de entrada de la división ISP aquí es la función xIntraCodingLumaISP.
La función xIntraCodingLumaISP divide principalmente la CU, y llama a la función xIntraCodingTUBlock para codificar la TU dividida, calcula la distorsión resultante y la tasa de código, calculando así el Costo RD y finalmente encontrando el Costo RD total del modo ISP actual.
bool IntraSearch::xIntraCodingLumaISP(CodingStructure& cs, Partitioner& partitioner, const double bestCostSoFar)
{
int subTuCounter = 0; //TU计数器
const CodingUnit& cu = *cs.getCU(partitioner.currArea().lumaPos(), partitioner.chType);
bool earlySkipISP = false;//提前跳过ISP
bool splitCbfLuma = false;
const PartSplit ispType = CU::getISPType(cu, COMPONENT_Y);//ISP划分类型
cs.cost = 0;
partitioner.splitCurrArea(ispType, cs);
CUCtx cuCtx;
cuCtx.isDQPCoded = true;
cuCtx.isChromaQpAdjCoded = true;
do // subpartitions loop ISP划分循环
{
uint32_t numSig = 0;
Distortion singleDistTmpLuma = 0;//失真
uint64_t singleTmpFracBits = 0;//码率
double singleCostTmp = 0;//RD Cost
// 获得划分后的TU
TransformUnit& tu = cs.addTU(CS::getArea(cs, partitioner.currArea(), partitioner.chType), partitioner.chType);
tu.depth = partitioner.currTrDepth;
// Encode TU
// 编码TU
xIntraCodingTUBlock(tu, COMPONENT_Y, false, singleDistTmpLuma, 0, &numSig);
if (singleDistTmpLuma == MAX_INT) // all zero CBF skip
{
earlySkipISP = true;
partitioner.exitCurrSplit();
cs.cost = MAX_DOUBLE;
return false;
}
{
if (m_pcRdCost->calcRdCost(cs.fracBits, cs.dist + singleDistTmpLuma) > bestCostSoFar)
{
// The accumulated cost + distortion is already larger than the best cost so far, so it is not necessary to calculate the rate
// 累计成本 + 失真已经大于目前为止的最佳成本,因此不必计算码率
earlySkipISP = true;
}
else
{
// 计算码率
singleTmpFracBits = xGetIntraFracBitsQT(cs, partitioner, true, false, subTuCounter, ispType, &cuCtx);
}
// 计算RD Cost
singleCostTmp = m_pcRdCost->calcRdCost(singleTmpFracBits, singleDistTmpLuma);
}
cs.cost += singleCostTmp; //计算总RD Cost
cs.dist += singleDistTmpLuma;//计算总失真
cs.fracBits += singleTmpFracBits;//计算总码率
subTuCounter++;//TU数目+1
splitCbfLuma |= TU::getCbfAtDepth(*cs.getTU(partitioner.currArea().lumaPos(), partitioner.chType, subTuCounter - 1), COMPONENT_Y, partitioner.currTrDepth);
int nSubPartitions = m_ispTestedModes[cu.lfnstIdx].numTotalParts[cu.ispMode - 1];
if (subTuCounter < nSubPartitions) //当前的TU数目小于分区总数目
{
// exit condition if the accumulated cost is already larger than the best cost so far (no impact in RD performance)
// 如果累计成本已经大于目前为止的最佳成本(对研发绩效没有影响),则退出条件
if (cs.cost > bestCostSoFar)
{
earlySkipISP = true;
break;
}
else if (subTuCounter < nSubPartitions)
{
// more restrictive exit condition
// 更严格的退出条件
double threshold = nSubPartitions == 2 ? 0.95 : subTuCounter == 1 ? 0.83 : 0.91;
if (subTuCounter < nSubPartitions && cs.cost > bestCostSoFar * threshold)
{
earlySkipISP = true;
break;
}
}
}
} while (partitioner.nextPart(cs)); // subpartitions loop
partitioner.exitCurrSplit();
const UnitArea& currArea = partitioner.currArea();
const uint32_t currDepth = partitioner.currTrDepth;
if (earlySkipISP)
{
cs.cost = MAX_DOUBLE;//如果提前退出ISP,则cost设置为MAXDOUBLE
}
else
{
cs.cost = m_pcRdCost->calcRdCost(cs.fracBits, cs.dist);
// The cost check is necessary here again to avoid superfluous operations if the maximum number of coded subpartitions was reached and yet ISP did not win
// 如果达到了最大编码子分区数,但ISP没有获胜,则必须再次进行成本检查,以避免多余的操作
if (cs.cost < bestCostSoFar)
{
cs.setDecomp(cu.Y());
cs.picture->getRecoBuf(currArea.Y()).copyFrom(cs.getRecoBuf(currArea.Y()));
for (auto& ptu : cs.tus)
{
if (currArea.Y().contains(ptu->Y()))
{
TU::setCbfAtDepth(*ptu, COMPONENT_Y, currDepth, splitCbfLuma ? 1 : 0);
}
}
}
else
{
earlySkipISP = true;
}
}
return !earlySkipISP;
}Seis, haz predicciones y transformaciones
En la reunión O, se adoptó la propuesta O0106 , que se basa principalmente en el tamaño de la CU para limitar el tamaño del área de predicción y el área de transformación después de la división vertical del ISP. Los contenidos principales son los siguientes:
| Tamaño del bloque de codificación (WxH) |
VTM-5.0 |
CE3-1.6 |
||
| Tamaño de partición para predicción |
Cambiar tamaño |
Tamaño de partición para predicción |
Cambiar tamaño |
|
| 4x8 |
2x8 |
2x8 |
4x8 |
2x8 |
| 4xN (N> 8) |
1xN |
1xN |
4xN |
1xN |
| 8xN (N> 4) |
2xN |
2xN |
4xN |
2xN |
Es decir, si el tamaño de la partición después de la división vertical es 1xN, 2xN, el tamaño de la partición durante la predicción se modifica a 4xN y el tamaño no cambia durante la transformación.
Tome los bloques de codificación 4xN (N> 8) y 8xN (N> 4) como ejemplos:
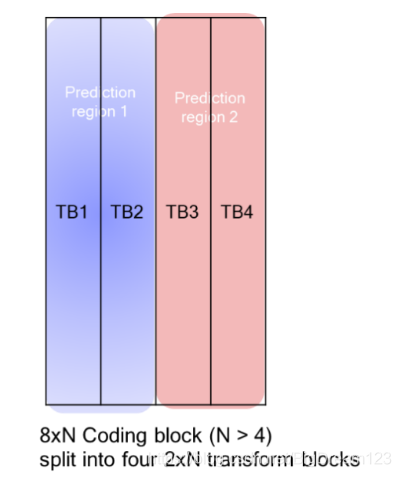
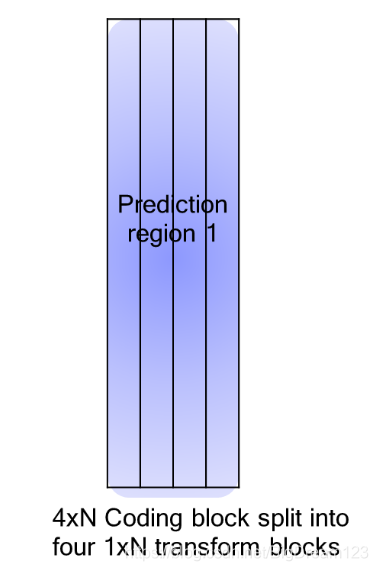
Para bloques de codificación 8xN (N> 4) codificados por ISP, después de la división vertical, la predicción se realiza en el área de predicción 4xN y el tamaño del bloque de transformación (TB) es 2xN; para bloques de codificación 4xN codificados por ISP, después de la división vertical, El área de predicción 4xN se utiliza para la predicción y el tamaño del bloque de transformación es 1xN.
Esta parte del código de restricción específico está en la función xIntraCodingTUBlock , y la parte del código ISP es la siguiente:
if (compID == COMPONENT_Y)
#else
if (compID == COMPONENT_Y || (isChroma(compID) && tu.cu->bdpcmModeChroma))
#endif
{
PelBuf sharedPredTS( m_pSharedPredTransformSkip[compID], area );
if( default0Save1Load2 != 2 )
{
bool predRegDiffFromTB = CU::isPredRegDiffFromTB(*tu.cu, compID);//预测尺寸和变换尺寸不一样
bool firstTBInPredReg = CU::isFirstTBInPredReg(*tu.cu, compID, area);//第一个进行预测的块
CompArea areaPredReg(COMPONENT_Y, tu.chromaFormat, area);//预测重建块
if (tu.cu->ispMode && isLuma(compID))
{
if (predRegDiffFromTB)
{ // 如果预测尺寸和TB不一样
if (firstTBInPredReg)
{ // 如果TB是第一次进行预测
CU::adjustPredArea(areaPredReg);//调整预测区域,将CU尺寸为4xN and 8xN (N > 4)的块的ISP预测区域改为4xN
initIntraPatternChTypeISP(*tu.cu, areaPredReg, piReco);
}
}
else
initIntraPatternChTypeISP(*tu.cu, area, piReco);
}
else
{
initIntraPatternChType(*tu.cu, area);
}
//===== get prediction signal =====
if(compID != COMPONENT_Y && !tu.cu->bdpcmModeChroma && PU::isLMCMode(uiChFinalMode))
{
{
xGetLumaRecPixels( pu, area );
}
predIntraChromaLM( compID, piPred, pu, area, uiChFinalMode );
}
else
{
if( PU::isMIP( pu, chType ) )
{
initIntraMip( pu, area );
predIntraMip( compID, piPred, pu );
}
else
{
if (predRegDiffFromTB)
{ //如果预测尺寸和TB不一样
if (firstTBInPredReg)
{ //如果TB是第一次进行预测
PelBuf piPredReg = cs.getPredBuf(areaPredReg);
predIntraAng(compID, piPredReg, pu);
}
}
else
predIntraAng(compID, piPred, pu);
}
}
// save prediction
if( default0Save1Load2 == 1 )
{
sharedPredTS.copyFrom( piPred );
}
}
else
{
// load prediction
piPred.copyFrom( sharedPredTS );
}
}La función initIntraPatternChTypeISP es principalmente para obtener y filtrar los píxeles de referencia durante la predicción del ISP. El código específico es el siguiente:
//初始化ISP的预测参数
void IntraPrediction::initIntraPatternChTypeISP(const CodingUnit& cu, const CompArea& area, PelBuf& recBuf, const bool forceRefFilterFlag)
{
const CodingStructure& cs = *cu.cs;
if (!forceRefFilterFlag)
{
initPredIntraParams(*cu.firstPU, area, *cs.sps);
}
const Position posLT = area;
bool isLeftAvail = (cs.getCURestricted(posLT.offset(-1, 0), cu, CHANNEL_TYPE_LUMA) != NULL) && cs.isDecomp(posLT.offset(-1, 0), CHANNEL_TYPE_LUMA);
bool isAboveAvail = (cs.getCURestricted(posLT.offset(0, -1), cu, CHANNEL_TYPE_LUMA) != NULL) && cs.isDecomp(posLT.offset(0, -1), CHANNEL_TYPE_LUMA);
// ----- Step 1: unfiltered reference samples -----
// ----- Step 1: 获取参考像素 -----
if (cu.blocks[area.compID].x == area.x && cu.blocks[area.compID].y == area.y) //第一个进行预测的TB
{
Pel *refBufUnfiltered = m_refBuffer[area.compID][PRED_BUF_UNFILTERED];
// With the first subpartition all the CU reference samples are fetched at once in a single call to xFillReferenceSamples
//在第一个子分区中,整个CU的所有参考像素在一次调用xFillReferenceSamples时被同时获取
if (cu.ispMode == HOR_INTRA_SUBPARTITIONS)
{
m_leftRefLength = cu.Y().height << 1;
m_topRefLength = cu.Y().width + area.width;
}
else //if (cu.ispMode == VER_INTRA_SUBPARTITIONS)
{
m_leftRefLength = cu.Y().height + area.height;
m_topRefLength = cu.Y().width << 1;
}
//获取参考像素
xFillReferenceSamples(cs.picture->getRecoBuf(cu.Y()), refBufUnfiltered, cu.Y(), cu);
// After having retrieved all the CU reference samples, the number of reference samples is now adjusted for the current subpartition
// 检索完所有CU的参考像素后,参考像素的数量现在根据当前的子分区进行调整
m_topRefLength = cu.blocks[area.compID].width + area.width;//上边的参考像素长度
m_leftRefLength = cu.blocks[area.compID].height + area.height;//左侧的参考像素长度
}
else
{
m_topRefLength = cu.blocks[area.compID].width + area.width;
m_leftRefLength = cu.blocks[area.compID].height + area.height;
const int predSizeHor = m_topRefLength;
const int predSizeVer = m_leftRefLength;
if (cu.ispMode == HOR_INTRA_SUBPARTITIONS) //水平划分
{
Pel* src = recBuf.bufAt(0, -1);
Pel *ref = m_refBuffer[area.compID][PRED_BUF_UNFILTERED] + m_refBufferStride[area.compID];
if (isLeftAvail)
{
for (int i = 0; i <= 2 * cu.blocks[area.compID].height - area.height; i++)
{
ref[i] = ref[i + area.height];
}
}
else
{
for (int i = 0; i <= predSizeVer; i++)
{
ref[i] = src[0];
}
}
Pel *dst = m_refBuffer[area.compID][PRED_BUF_UNFILTERED] + 1;
dst[-1] = ref[0];
for (int i = 0; i < area.width; i++)
{
dst[i] = src[i];
}
Pel sample = src[area.width - 1];
dst += area.width;
for (int i = 0; i < predSizeHor - area.width; i++)
{
dst[i] = sample;
}
}
else
{
Pel* src = recBuf.bufAt(-1, 0);
Pel *ref = m_refBuffer[area.compID][PRED_BUF_UNFILTERED];
if (isAboveAvail)
{
for (int i = 0; i <= 2 * cu.blocks[area.compID].width - area.width; i++)
{
ref[i] = ref[i + area.width];
}
}
else
{
for (int i = 0; i <= predSizeHor; i++)
{
ref[i] = src[0];
}
}
Pel *dst = m_refBuffer[area.compID][PRED_BUF_UNFILTERED] + m_refBufferStride[area.compID] + 1;
dst[-1] = ref[0];
for (int i = 0; i < area.height; i++)
{
*dst = *src;
src += recBuf.stride;
dst++;
}
Pel sample = src[-recBuf.stride];
for (int i = 0; i < predSizeVer - area.height; i++)
{
*dst = sample;
dst++;
}
}
}
// ----- Step 2: filtered reference samples -----
// ----- Step 2: 对参考像素进行滤波 -----
if (m_ipaParam.refFilterFlag || forceRefFilterFlag)
{
Pel *refBufUnfiltered = m_refBuffer[area.compID][PRED_BUF_UNFILTERED];
Pel *refBufFiltered = m_refBuffer[area.compID][PRED_BUF_FILTERED];
xFilterReferenceSamples(refBufUnfiltered, refBufFiltered, area, *cs.sps, cu.firstPU->multiRefIdx);
}
}