Directorio de artículos
1. ¿Qué es BMS?
1.1 definición de BMS
Bueno, finalmente llegamos al punto, en primer lugar, qué es BMS.
BMS es la abreviatura de SISTEMA DE GESTIÓN DE BATERÍAS.
Básicamente, un sistema de suministro de energía compuesto por más de dos celdas individuales requiere un BMS.

Después de discutir la batería en nuestro último artículo, creo que todos ya conocemos un BMS. Funciones básicas que deberían estar disponibles.
1.2 Funciones básicas de BMS
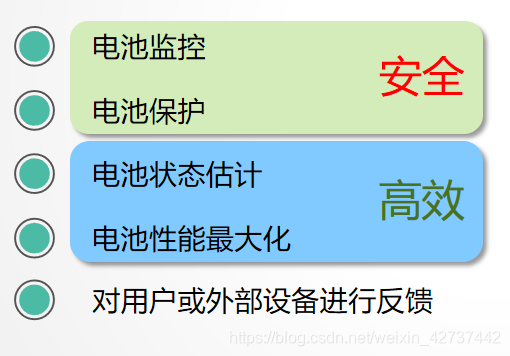
- El monitoreo de la
batería es primero el monitoreo de la batería. BMS necesita monitorear varios estados de la batería, incluyendo voltaje, corriente, temperatura, etc. Generalmente, tanto el único como el total necesitan ser detectados. De acuerdo con la complejidad de BMS, existen diferentes estructuras. Hablaremos de eso. - Protección de la batería Después de
obtener los datos, proporcionamos la protección necesaria para la batería en función de los datos, y dejamos que la batería funcione en un entorno seguro, que incluye principalmente el control de voltaje y corriente y la gestión de la temperatura durante la carga y descarga. - La
estimación del estado de la batería es entonces una estimación del estado de la batería basada en datos anteriores, como el SOC. Estos datos no se pueden medir directamente. Es necesario medirlo por otros métodos, como el uso de cambios de voltaje para caracterizar la capacidad, pero esto Este tipo a menudo es inexacto, porque la curva de voltaje de la carga y descarga de la batería es casi plana dentro de un cierto rango, lo que conduce a un gran error; uno más complicado es usar la integración del voltaje y la corriente de acuerdo con el tiempo de carga y descarga. , Será un poco mejor que antes; entonces hay algunos algoritmos de filtro de Kalman para lograr, este es un buen algoritmo que se puede usar para predecir, también tiene en cuenta todo tipo de ruido; ahora hay nervios más populares Se usa Internet y la IA se usa para la administración, pero no sé si hay productos maduros disponibles. - Para maximizar el rendimiento de la batería,
nuestro BMS también necesita especificar diferentes estrategias de equilibrio a través del análisis de todos los datos. El objetivo final es cargarlo lo más lleno posible y descargarlo tanto como sea posible durante la descarga, y no existe como hemos mostrado antes. Fenómeno extremadamente desigual. - Comentarios a los usuarios o dispositivos externos
Finalmente, lo que se necesita es comunicarse con el mundo exterior, generalmente hablando para comunicarse con nuestras otras ECU a través del bus CAN.
En términos generales, el BMS en realidad resuelve dos cosas: la primera es la seguridad, garantizar que la batería tenga un buen ambiente de trabajo y garantizar que la lluvia y el rocío estén cubiertos, de modo que las baterías individuales no siempre sufran y causen insatisfacción. La razón principal es que el resultado es terrible. Golpee o explote; seguido de una alta eficiencia, deje que cada celda juegue su propio valor máximo y produzca el mayor beneficio. ,
2. Clasificación de BMS
A continuación, permítanme presentarles la clasificación de BMS. Cuando se trata de la clasificación, lo primero que hay que mencionar son los criterios de clasificación, que es clasificar según qué. Aquí les presentaré dos aspectos.
2.1 Clasificación por función
El primero es la clasificación por función. De acuerdo con la función, iremos de simples a complejos uno por uno. El
primero es el más simple, llamado
-
La corriente constante y la carga de voltaje constante, esto ni siquiera se puede llamar un sistema de gestión de la batería. Algunos cargadores simples son esta estrategia, ya que es para proporcionar una corriente o voltaje constante, que se utiliza en automóviles con batería que usan baterías de plomo-ácido en muchas áreas. Equipo, pero debido a que las baterías de plomo-ácido son relativamente sólidas, generalmente no son peligrosas. Sin embargo, sabemos por la introducción anterior que esto simplemente no puede proporcionar ninguna protección para la batería, pero sin otras estrategias de control, esto es equivalente a exponer directamente la batería a un entorno desprotegido, lo cual es más peligroso.
-
El segundo tipo se llama derivación, que también es relativamente simple. La forma más simple es conectar un diodo Zener en paralelo con la batería para formar un circuito de sujeción de voltaje, que es básicamente equivalente a simplemente monitorear el voltaje. Cuando el voltaje alcanza el valor establecido En ese momento, el diodo se descompone en la dirección inversa, desviando la mayor parte de la corriente para proteger la batería. Sin embargo, también hay algunos problemas. La corriente nominal de la derivación es limitada. Cuando la corriente es mayor que el límite superior de la derivación, seguirá fluyendo corriente a través de la batería. A juego, el cargador puede ajustar dinámicamente el voltaje junto con la acción de la derivación para lograr mejores resultados. Y parece que hay relativamente pocas derivaciones para cada batería. La derivación solo puede alcanzar el nivel de la batería.

-
Un tercer detector es, un denominado detector, se proporciona sólo con las funciones de medición, y se puede medir el voltaje total de la célula, corriente, temperatura, etc. SOC estimaciones, que será presentado en la pantalla o en otra parte,

que Es un diagrama esquemático de un monitor. Como puede ver, de hecho, no puede usarse como un BMS completo. ¿Por qué? Aunque los datos se pueden mostrar, no puede evitar la sobrecarga y la sobredescarga, ni puede lograr el equilibrio, pero ¿por qué debería enumerarlo?
Porque en algunos casos, la escena en la que usamos la batería es alguien involucrado, siempre que agreguemos personas a este sistema, está completa y podemos realizar las acciones correspondientes de acuerdo con los parámetros. -
Después de hablar sobre el monitor, llegamos al monitor, ¿cuál es la diferencia? De hecho, la acción de control se agrega al monitor, de modo que se forma un circuito cerrado, que puede funcionar automáticamente y realizar la acción correspondiente de acuerdo con los datos monitoreados, como el uso de la acción del relé para cortar el cargador o la carga. La batería se puede proteger contra sobrecarga y descarga, lo que garantiza la seguridad de la batería. Pero su defecto es que no puede equilibrar el poder entre las células individuales.

-
A continuación, continuamos enriqueciendo la función, ecualizador.

El ecualizador agrega una función de equilibrado de una sola célula sobre la base del monitor, que puede lograr un equilibrio activo y pasivo, asegurando así el uso óptimo de la batería.
2.2 Clasificación según topología
La topología es muy importante para BMS, ya que afectará el costo del sistema, la confiabilidad, la facilidad de instalación y mantenimiento, y la precisión de la medición y la predicción.
2.1.1 Centralizado
El primero es el primer tipo, el tipo centralizado, también llamado tipo integrado. El
tipo centralizado es encapsular todo el BMS en un dispositivo, tirar el cable y conectarlo a la batería del conductor.
Como se muestra en la imagen,

sus ventajas son muy obvias,
- El primero es la estructura compacta, a menudo una caja.
- Entonces el precio es más barato.
- Además, el mantenimiento es relativamente simple y, a menudo, puede reemplazarse como un todo.
Pero habrá deficiencias,
- El primero es la escasa escalabilidad, un producto tiene que ser rediseñado después de finalizado,
- En segundo lugar, hay peligros ocultos, porque si el arnés es demasiado largo, causará una serie de peligros ocultos.
2.1.2 Modular
El siguiente es el modular

que es similar a BMS centralizada, pero se divide en modular BMS muchos de los mismos sub-módulos, cada paquete diferentes partes de conexión de cables internos lo todo el panel, un área de un monitor,
que Se dice que los módulos tienen la misma función, pero de hecho habrá un módulo asignado como módulo principal, que se utiliza para administrar y programar la batería completa y es responsable de comunicarse con el mundo exterior. Los otros BMS esclavos se comunican con el BMS maestro a través del bus de comunicación, pero las funciones entre ellos son las mismas.
Sus ventajas son:
- En primer lugar, debido a que es equivalente a miniaturizar el BMS centralizado y las múltiples cascadas, tiene la mayoría de las ventajas de centralizado, como mantenimiento conveniente, precios baratos, etc.
- En segundo lugar, debido al pequeño tamaño de un solo módulo, los cables del submódulo a la celda serán relativamente cortos y pueden estar más cerca de la batería, evitando así los peligros y errores ocultos causados por cables excesivamente largos.
- Finalmente, también es fácil de expandir, agregue más submódulos para lograr la expansión
Pero también tiene algunas desventajas,
- El primero es la necesidad de agregar cables adicionales: en comparación con el tipo centralizado, el paso modular debe conectarse al paquete de baterías, y también se requieren cables entre cada módulo.
- En segundo lugar, el costo es más alto, la razón principal es que la función de cada módulo es la misma, pero no se utilizan todas las funciones, lo que causa desperdicio, especialmente el módulo esclavo, su función práctica no es mucho
De hecho, vemos aquí que esta estructura no es particularmente razonable, por lo que hay una versión mejorada.
2.1.3 Maestro-esclavo
De hecho, vemos aquí que esta estructura no es particularmente razonable, por lo que hay una versión mejorada. Separamos los módulos de acuerdo con las diferentes funciones del maestro y el esclavo.

Las funciones que no utiliza el módulo se eliminarán, de modo que se pueda reducir una gran cantidad de costos
. Las funciones de las que es responsable el BMS maestro son relativamente grandes, incluyendo cálculo, predicción, toma de decisiones, comunicación, etc. La unidad esclava es básicamente responsable de la medición.
De esta manera, se puede decir que hereda la mayoría de las ventajas de la estructura modular, al tiempo que reduce el costo de expansión.
2.1.4 Distribuido
También hay una topología, que es ligeramente diferente de lo que hablamos antes, llamada distribuida

En las topologías anteriores, varios dispositivos electrónicos no están instalados en una sola batería, y básicamente se miden tirando el cable en el pasado.
Sin embargo, en un sistema distribuido, nuestra unidad de medida y otros equipos electrónicos se instalan directamente en la placa de circuito integrada con la batería individual, lo cual es una ventaja en comparación con las anteriores, la conexión entre el BMS y la batería individual Básicamente eliminado.
Entonces es un poco como el tipo maestro-esclavo, también tendrá un controlador que se encargará del cálculo, la predicción, la toma de decisiones, etc. Los módulos se comunican en función del bus. En los automóviles, generalmente utilizamos el bus CAN.
Cada una de nuestras unidades contiene un circuito de adquisición, MCU con bus CAN puede enviar y recibir información directamente a través de la comunicación del bus.
Sus ventajas son naturalmente muchas:
- El primero es tener una escalabilidad extremadamente alta, que puede ser adecuada para la expansión de células individuales.
- En segundo lugar, la fiabilidad de la conexión es alta. Básicamente, no hay cables que sean demasiado largos. La batería y el circuito de medición están estrechamente integrados, lo que también reduce la interferencia y los errores. La seguridad también es muy alta.
- Al mismo tiempo, también es fácil de mantener: si algo se rompe, solo es necesario reemplazar una unidad pequeña.
Pero habrá algunas deficiencias:
- Por ejemplo, en primer lugar, el costo es muy alto, porque cada monómero tiene un conjunto de equipos, por lo que el costo total es muy alto.
- En segundo lugar, el volumen es demasiado grande. Esto también es fácil de entender. Hay un sistema de medición al lado de cada celda de cada batería, que afectará el volumen de todo el panel.
Ahora, algunos CI también pueden hacerse muy pequeños, este factor de influencia se volverá cada vez más débil.
3. Funciones de BMS
3.1 Funciones básicas de BMS
Hablando de la función de BMS, supongamos primero en función del contenido anterior. En
primer lugar, tenemos un paquete de baterías, baterías de iones de litio, que son muy potentes, pero tienen un temperamento de mal genio. ¿Cómo diseñarlo para gestionarlo?
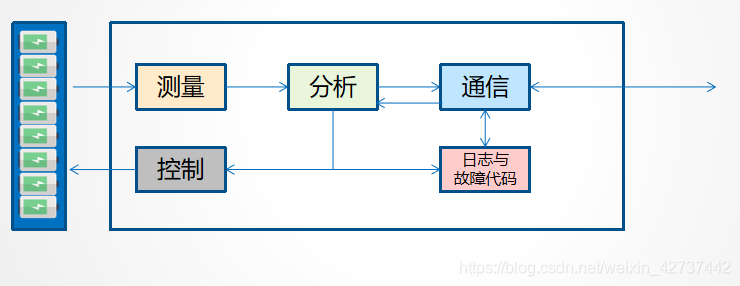
- ¿Cuál es la primera función que necesitamos, definitivamente la medición, necesitamos medir toda la información que queremos saber de la batería, después de obtener la información?
- Ciertamente no haremos una presentación simple. Necesitamos analizar los datos. Cuando tenemos un resultado basado en el análisis de datos, ¿qué debemos hacer?
- En primer lugar, debe ser el control, controlar el proceso de carga y descarga, controlar la temperatura, etc.
- En segundo lugar? Necesitamos informar los resultados del análisis a otros controladores, similares al control del vehículo, el tablero, etc.
- Además de la comunicación, nuestros resultados también deben guardarse, ya que habrá algunas fallas en este proceso, y se generarán códigos de fallas, también para la trazabilidad futura cuando analizamos el problema, la función de registro es necesaria y el registro también debe pasar El módulo de comunicación se comunica con el mundo exterior, y este proceso es bidireccional.
- Al mismo tiempo, los comandos que recibimos del exterior también deben agregarse al proceso de análisis, por lo que este proceso también debe ser bidireccional.
Esta es la función básica de un BMS.
3.2 Funciones típicas de BMS
Echemos un vistazo a las características que contendrá un BMS genérico real
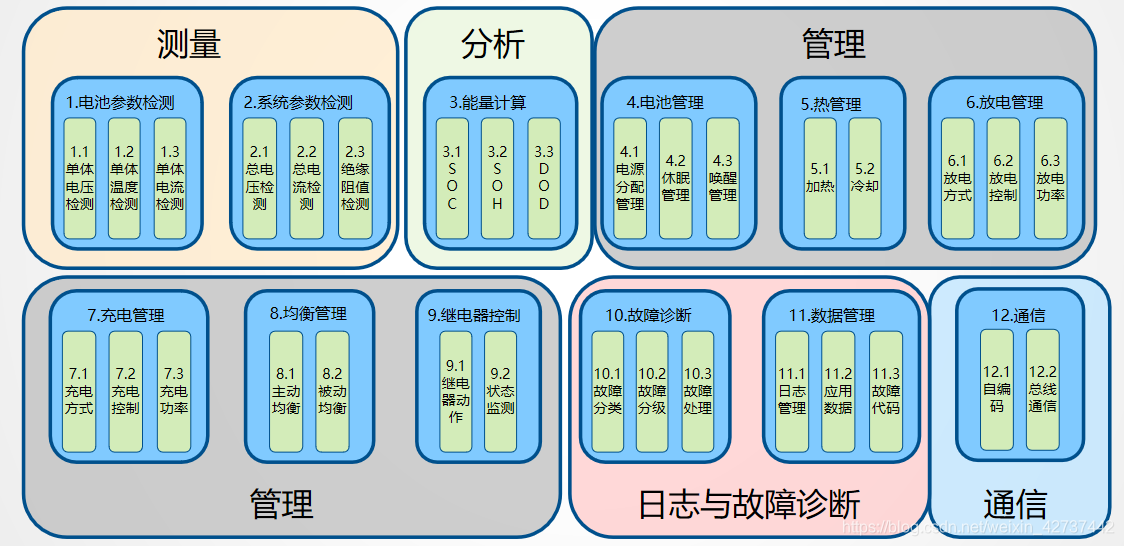
- La primera es la prueba de parámetros de la batería, que es principalmente para la batería individual, incluido el voltaje, la temperatura y la resistencia interna de la batería. La
recolección de voltaje ahora se recolecta básicamente con un ADic especial, pero si Si mira hacia abajo, tendrá una estructura diferente. Algunos están equipados con un canal publicitario para cada celda. Lo llamamos adquisición discreta. Algunos usan un electrodo positivo para escanear. Lo llamamos multiplexación unipolar. La multiplexación para escanear, la llamamos multiplexación diferencial, por supuesto, esto se determina principalmente por el costo del chip.
La detección de temperatura generalmente se realiza con un termistor, pero la diferencia es la cantidad y la ubicación del termistor. Si se monitorea cada monómero, es naturalmente el más preciso, pero el costo está destinado a aumentar, y Se agregarán más arneses de cableado, por lo que hay otra forma de monitorear por región, dividiendo la batería en diferentes áreas para monitorear la temperatura, el costo correspondiente se reducirá y, si el punto de monitoreo es más razonable, similar Efecto Este problema tiene una ventaja natural para el BMS distribuido: el BMS distribuido puede integrar la función de medición de temperatura con relativa facilidad.
Para la corriente, no hay forma de medirlo directamente, generalmente con un shunt o un sensor Hall. - El segundo es la medición de los parámetros del sistema. Acabamos de hablar sobre la unidad. Este es un control del conjunto. Incluyendo la medición del voltaje total, la corriente total y la resistencia de aislamiento, esta resistencia de aislamiento también es obligatoria para garantizar la seguridad en las normas nacionales.
- La tercera función está relacionada con el cálculo de la energía, que consiste en utilizar varios métodos para calcular los parámetros de SOC, SOH, DOD y otros indicadores que pueden medir la batería.
- El cuarto es la gestión de la batería, incluida la distribución de la energía de la batería, el reposo y la activación de la batería.
- El quinto es la gestión térmica, porque el rango de temperatura de funcionamiento normal de la batería es relativamente estrecho, por lo que la temperatura de la batería debe ser controlada.
- Las funciones sexta y séptima de las que hablamos juntos son el control de la potencia y la forma de cargar y descargar.
- Además, la gestión del octavo saldo, incluido el saldo activo y el saldo pasivo, básicamente puede garantizar que cada celda se pueda utilizar por completo.
- Además, es necesario proporcionar la protección necesaria para todo el sistema, por lo que el control del relé es indispensable.
- El siguiente paso es diagnosticar la falla, incluida la clasificación, clasificación y tratamiento de algunas fallas.
- El siguiente paso es procesar los datos, incluidos registros de registros, registros de códigos de fallas y alguna gestión de datos de aplicaciones.
- El último es la comunicación, que generalmente se logra a través del bus CAN.
Casi hemos resumido las 12 funciones principales, luego clasificamos estas funciones y descubrimos que las funciones que pensábamos antes eran casi las mismas.
En la siguiente sección, hablamos sobre las pruebas BMS, así que estad atentos.
Materiales de referencia: http://www.hongcesys.com/
