Golpe notas visuales I
Lecture - tres espaciales movimiento del cuerpo rígido
Punto del sistema de coordenadas:
Concepto básico:
-
sistema de coordenadas: zurdos y diestros. Diestro es más comúnmente utilizado. Cuando se define el sistema de coordenadas, se define el sistema de coordenadas del mundo, cámara de sistema de coordenadas, y otro objeto de interés del sistema de coordenadas. Grupo puede ser cualquier punto del espacio Expresado espacio lineal.
-
La resta: utilizando las coordenadas describe más conveniente.
-
El producto interno: gracias a un punto, es decir,
-
producto externo: vector producto vectorial obtiene, es decir,
 la mano derecha, regla de la mano derecha de acuerdo con el vector obtenido adquirida.
la mano derecha, regla de la mano derecha de acuerdo con el vector obtenido adquirida. -
Transformación entre los sistemas de coordenadas:
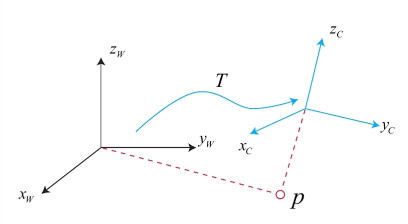
por la traducción (resta vector) y la rotación (que se describe en una variedad de maneras, véase más adelante) -
2D: La bidimensional de coordenadas de puntos representa una posición de ángulo de rotación de + indica la orientación.
-
3D: El tridimensional de coordenadas punto representa una posición de ángulo de giro + (el ángulo entre la conversión rotatorio, hay varias maneras de rotación, ver más abajo).
Una primera matriz de rotación descrito :( rotación)
sistema de coordenadas (e_1,e_2,e_3)después de la rotación se convierte (e'_1,e'_2,e'_3), en el espacio de tres dimensiones, el vector apermanece estacionaria, entonces cómo Expresado en (e'_1,e'_2,e'_3)coordenadas de:
- Linear Expresando vector normal
acoordenadas: dos coordenadas esencia respectivamente diferentes conjuntos representan el mismo grupo a un punto, a continuación, una combinación lineal de los dos son iguales: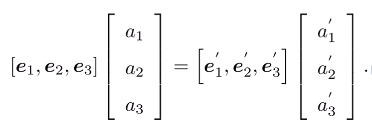
- Gire a la izquierda al mismo tiempo, ambas partes
(e_1,e_2,e_3)transpuestas a obtener: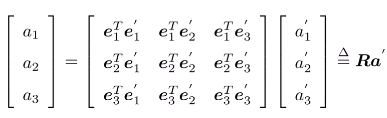
- R es la matriz de rotación .
- naturaleza:
- R es una matriz ortogonal (es decir, la transpuesta inversa de una matriz o una matriz transpuesta son ellos mismos ×).
- R 1 es determinante.
- satisface Matrix las propiedades anteriores pueden ser llamados matriz de rotación , utilizando la colección representa:

, también conocido como grupo ortogonal especial SO (3). - representación fija (orden de los subíndices):
 y satisface la relación matricial:
y satisface la relación matricial:  .
.
Por lo tanto, las coordenadas espaciales de diferentes puntos de la transformación del sistema de coordenadas se pueden utilizar:  es decir, la rotación + forma traducible una descripción completa de
es decir, la rotación + forma traducible una descripción completa de
- Teoría: el teorema de Euler, el movimiento en general en el espacio tridimensional, el cuerpo rígido puede ser descompuesto en un punto por encima de la sartén, y la rotación alrededor del eje de rotación a través en este punto.
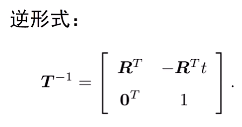
Sin embargo, esta representación será inconveniente en momentos en que la transformada (  ), el uso de manera aumentada, dijo:
), el uso de manera aumentada, dijo:

- En el que,
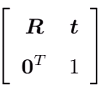 llamada la matriz de transformación
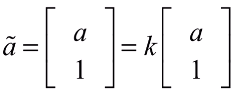
llamada la matriz de transformación  forma se llama coordenadas homogéneas.
forma se llama coordenadas homogéneas. - coordenadas homogéneas propiedades: coordenadas homogéneas multiplicado por cualquier no siguen expresando las mismas constantes 0 coordenadas
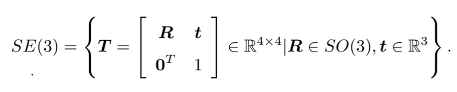
- Conjunto de matrices de transformación: Europea llamado grupo especial SE (3):
Ángulos de Euler y vectores de rotación:
matriz de rotación es más comúnmente utilizado en la práctica, pero estos conceptos también tienen que tener en cuenta.
La matriz de rotación R es una matriz de 3 x 3 de nueve elementos, pero sólo tres grados de libertad, es decir redundante descripción en el camino, entonces los menos elementos puede rotación Expresión?
La rotación en la presencia de un árbol (vector), así como los ángulos rotados, por lo que le gustaría usar el ángulo del vector se multiplica por la forma (después de unificación) para describir una rotación.
vector de giro
-
Un vector de dirección de la dirección del eje de rotación, la longitud del ángulo girado. (El tamaño angular de la multiplicación unidad vector)
-
También conocido como el ángulo de eje / eje diagonal.
-
fórmula Rodríguez puede ser girada vector ( n- , Theta) se convierte en una matriz de rotación R:

-
La matriz de rotación R se puede convertir en un vector de rotación ( n- , Theta):
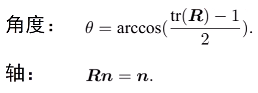 n- es un vector de características.
n- es un vector de características.
ángulos de Euler
- La rotación de la rotativa descompuesto en tres direcciones, tal como se utiliza comúnmente con el fin de guiñada-pitch-roll (es decir, la rotación alrededor de ZYX manera, observaron que diferentes lugares después de la rotación alrededor de la Z, ejes Y sobre los que puede ser el eje original, y después de que el eje Y se puede girar)

- bloqueo de ejes (Gimbal Lock): la presencia de la singularidad ángulos de Euler (a un cierto valor, el grado de libertad de rotación menos 1)
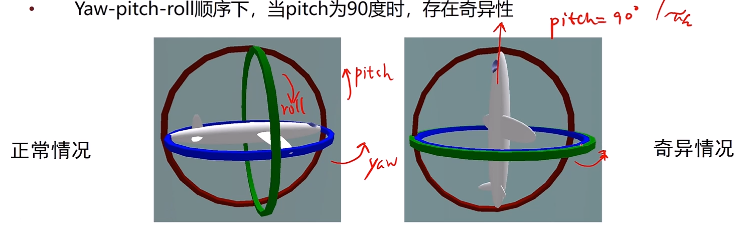 Después de la finalización de la dirección de rotación de la dirección de cabeceo, balanceo y guiñada de la dirección de rotación de la coinciden rotación. Por lo tanto, ángulos de Euler no son adecuados para la interpolación o iterativo, no se utiliza.
Después de la finalización de la dirección de rotación de la dirección de cabeceo, balanceo y guiñada de la dirección de rotación de la coinciden rotación. Por lo tanto, ángulos de Euler no son adecuados para la interpolación o iterativo, no se utiliza.
cuaternión:
Se basa matriz de rotación y la rotación del vector, la ventaja de ángulos de Euler, es una excelente manera de describir.
- caso 2D, la rotación puede ser expresada por una pluralidad de unidades:
- Multiplicado por z i, correspondiente a girar 90 grados (
 ), se hace girar por -90 grados -i.
), se hace girar por -90 grados -i.
En tres dimensiones, el complejo de cuaternión como extensión definida
-
Características 1: una parte real de tres parte imaginaria +

-
Característica 2: existe una relación entre la parte imaginaria:
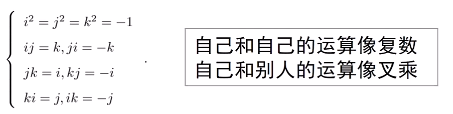
-
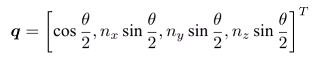
rotación Quaternion de espacio tridimensional se puede expresar:

-
Cuaterniones pueden definirse en muchas operaciones:
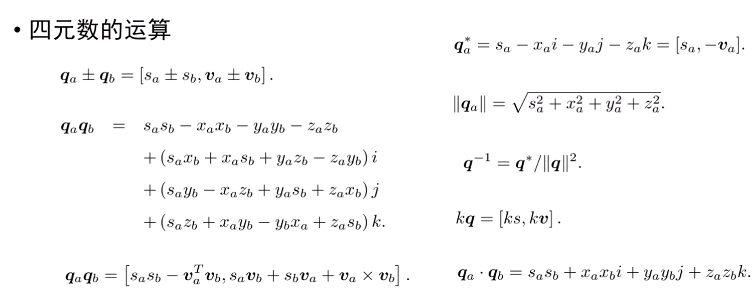
-
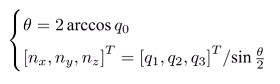
Quaternion se convierte a vectores de rotación:
-
Rotación de vector para un cuaternión:
-
Una rotación de cuaternión:
