Article directory
overview
dlib supports the detection of facial feature key points, and the official provides 68-dimensional and 5-dimensional face key store detection pre-training models for download and use.
Implementation method of key point detection
Implementation steps
- Load the picture and detect the face area (including face detection model creation, etc.)
- Pass in pictures and face detection results, and obtain key point data for face replacement (including face landmark model creation, etc.)
- Parsing facial key point data
Relevant data and model file download: Address
CNN face detection model name: mmod_human_face_detector.dat.bz2
68-dimensional face detection model name: shape_predictor_68_face_landmarks.dat.bz2
5-dimensional face detection model name:shape_predictor_5_face_landmarks.dat.bz2
code example
In this example, the CNN face detection model and the 68-dimensional face key point detection model are used
import dlib
import numpy as np
from cv2 import cv2
# step 1. create the face detector and shape predictor model
face_detector_model_path = '../models/mmod_human_face_detector.dat'
face_detector = dlib.cnn_face_detection_model_v1(face_detector_model_path) # dlib.cnn_face_detection_model_v1
shape_model_path = r'../models/shape_predictor_68_face_landmarks.dat'
face_shape_predictor = dlib.shape_predictor(shape_model_path) # dlib.shape_predictor
# step 2. process face detection
# note that the difference between the image data formated as numpy.ndarray read by dlib and cv2 is that dlib read it channels as *R G B* order while cv2 read as *B G R*,so you should do one more step to convert the image if using cv2
image_path = "sample.jpg"
img = dlib.load_rgb_image(image_path)
# img = cv2.cvtColor(cv2.imread(image_path),cv2.COLOR_BGR2RGB)
detections = face_detector(img, 1) # dlib.mmod_rectangles
# step 3. get shape of one face for example
detection = detections[0] # dlib.mmod_rectangle
# the mmod_rectangle contains two parts : confidence and rect
shape = face_shape_predictor(img, detection.rect) # dlib.full_object_detection
step 4. get all the face landmark points
landmark_points = shape.parts() # dlib.points
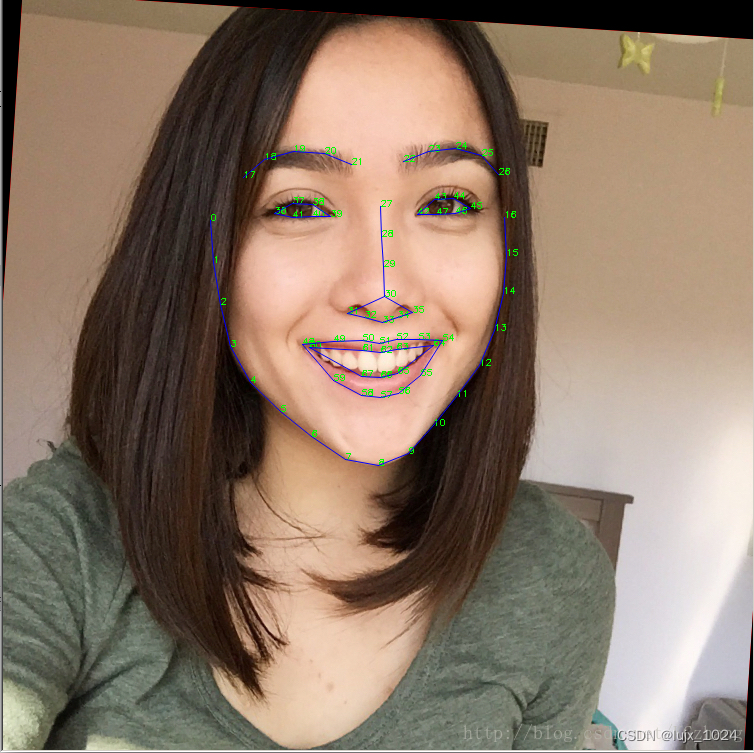
Effect example
The rendering after connecting all 68-dimensional face feature key points is as follows

The order of the key points and the corresponding facial position:
Key class and interface methods
overview
- Face detection class:
dlib.fhog_object_detectoranddlib.cnn_face_detection_model_v1, the former is based on the HOG model, the latter is based on the CNN model, the former detection method is called__call(img)__ ->dlib.rectanglesandrun(img,upsample_num,threshold)->(dlib.rectangles,List[scores:int],List[int]), the latter detection method is called__call(img)__->dlib.mmod_rectangles - Key point detection class:
dlib.shape_predictor, prediction call method__call__(self,image, box: dlib.rectangle)->dlib.full_object_detection - Detection result class:
dlib.full_object_detection, common methodpart(self, idx: int)->dlib.pointsingle key point information,parts(self)->dlib.pointsall key point information - Keypoint class:
dlib.pointkeypoint, members include x, y,dlib.pointslist of keypoints
Keypoint detection class:dlib.shape_predictor
class dlib.shape_predictor
This object is a tool that takes in an image region containing some object and outputs a set of point locations that define the pose of the object. The classic example of this is human face pose prediction, where you take an image of a human face as input and are expected to identify the locations of important facial landmarks such as the corners of the mouth and eyes, tip of the nose, and so forth.
__call__(self: dlib.shape_predictor, image: array, box: dlib.rectangle) → dlib.full_object_detection
requires
image is a numpy ndarray containing either an 8bit grayscale or RGB image.
box is the bounding box to begin the shape prediction inside.
ensures
This function runs the shape predictor on the input image and returns a single full_object_detection.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.shape_predictor) -> None
__init__(self: dlib.shape_predictor, arg0: unicode) -> None
Loads a shape_predictor from a file that contains the output of the train_shape_predictor() routine.
save(self: dlib.shape_predictor, predictor_output_filename: unicode) → None
Save a shape_predictor to the provided path.
Test result class:dlib.full_object_detection
class dlib.full_object_detection
This object represents the location of an object in an image along with the positions of each of its constituent parts.
__init__(self: dlib.full_object_detection, rect: dlib.rectangle, parts: object) → None
requires
rect: dlib rectangle
parts: list of dlib.point, or a dlib.points object.
num_parts
The number of parts of the object.
part(self: dlib.full_object_detection, idx: int) → dlib.point
A single part of the object as a dlib point.
parts(self: dlib.full_object_detection) → dlib.points
A vector of dlib points representing all of the parts.
rect
Bounding box from the underlying detector. Parts can be outside box if appropriate.
Keypoint class:dlib.point dlib.points
class dlib.point
This object represents a single point of integer coordinates that maps directly to a dlib::point.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.point, x: int, y: int) -> None
__init__(self: dlib.point, p: dlib::vector<double, 2l>) -> None
__init__(self: dlib.point, v: numpy.ndarray[int64]) -> None
__init__(self: dlib.point, v: numpy.ndarray[float32]) -> None
__init__(self: dlib.point, v: numpy.ndarray[float64]) -> None
normalize(self: dlib.point) → dlib::vector<double, 2l>
Returns a unit normalized copy of this vector.
x
The x-coordinate of the point.
y
The y-coordinate of the point.
class dlib.points
An array of point objects.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.points) -> None
__init__(self: dlib.points, arg0: dlib.points) -> None
Copy constructor
__init__(self: dlib.points, arg0: iterable) -> None
__init__(self: dlib.points, initial_size: int) -> None
append(self: dlib.points, x: dlib.point) → None
Add an item to the end of the list
clear(self: dlib.points) → None
count(self: dlib.points, x: dlib.point) → int
Return the number of times x appears in the list
extend(*args, **kwargs)
Overloaded function.
extend(self: dlib.points, L: dlib.points) -> None
Extend the list by appending all the items in the given list
extend(self: dlib.points, arg0: list) -> None
insert(self: dlib.points, i: int, x: dlib.point) → None
Insert an item at a given position.
pop(*args, **kwargs)
Overloaded function.
pop(self: dlib.points) -> dlib.point
Remove and return the last item
pop(self: dlib.points, i: int) -> dlib.point
Remove and return the item at index i
remove(self: dlib.points, x: dlib.point) → None
Remove the first item from the list whose value is x. It is an error if there is no such item.
resize(self: dlib.points, arg0: int) → None