Featured program examples
VS+QT+PCL point cloud display to grid surface body form realization
If you need to install the operating environment or remote debugging, see the personal QQ business card at the bottom of the article, and professional and technical personnel will assist remotely!
{kind=link}
foreword
This blog writes code for <<VS+QT+PCL point cloud display to grid surface body form implementation>>, the code is neat, regular and easy to read. The first choice for learning and application recommendation.
Article directory
1. Required tool software
2. Use steps
1. Import library
2. Code implementation
3. Running results
3. Online assistance
1. Required tool software
1. VS, Qt
2. PCL
2. Use steps
1. Import library
#ifndef CLOUDVIEWER_H
#define CLOUDVIEWER_H
#include "MyCloud.h"
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/io/vtk_io.h>
#include <pcl/io/obj_io.h>
#include <pcl/io/vtk_lib_io.h> // loadPolygonFileOBJ
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/common/common.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/PolygonMesh.h>
#include <QtWidgets/QMainWindow>
#include "GBK.h"
#include "ui_CloudViewer.h"
#include "AboutWin.h"
#include "Tools.h"
#include "MeshProcessing.h"
#include "FileIO.h"
#include <vector>
#include <map>
#include <algorithm>
#include <QtWidgets/QMainWindow>
#include <QString>
#include <QDebug>
#include <QLabel>
#include <QMessageBox>
#include <QAction>
#include <QMenu>
#include <QMenuBar>
#include <QToolBar>
#include <QStatusBar>
#include <QFileDialog>
#include <QColorDialog>
#include <QHBoxLayout>
#include <QVBoxLayout>
#include "QVTKWidget.h"
#include <vtkRenderWindow.h>
2. Code implementation
code show as below:
#include "CloudViewer.h"
CloudViewer::CloudViewer(QWidget* parent)
: QMainWindow(parent) {
ui.setupUi(this);
/***** Slots connection of QMenuBar and QToolBar *****/
// File (connect)
QObject::connect(ui.openAction, &QAction::triggered, this, &CloudViewer::open);
QObject::connect(ui.addAction, &QAction::triggered, this, &CloudViewer::add);
QObject::connect(ui.clearAction, &QAction::triggered, this, &CloudViewer::clear);
ui.saveAction->setData(QVariant(false)); // isSaveBinary = false
ui.saveBinaryAction->setData(QVariant(true)); // isSaveBinary = true
connect(ui.saveAction, SIGNAL(triggered()), this, SLOT(save()));
connect(ui.saveBinaryAction, SIGNAL(triggered()), this, SLOT(save()));
QObject::connect(ui.exitAction, &QAction::triggered, this, &CloudViewer::exit);
// Display (connect)
QObject::connect(ui.pointcolorAction, &QAction::triggered, this, &CloudViewer::pointcolorChanged);
QObject::connect(ui.bgcolorAction, &QAction::triggered, this, &CloudViewer::bgcolorChanged);
QObject::connect(ui.mainviewAction, &QAction::triggered, this, &CloudViewer::mainview);
QObject::connect(ui.leftviewAction, &QAction::triggered, this, &CloudViewer::leftview);
QObject::connect(ui.topviewAction, &QAction::triggered, this, &CloudViewer::topview);
// Generate (connect)
QObject::connect(ui.cubeAction, &QAction::triggered, this, &CloudViewer::cube);
QObject::connect(ui.sphereAction, &QAction::triggered, this, &CloudViewer::createSphere);
QObject::connect(ui.cylinderAction, &QAction::triggered, this, &CloudViewer::createCylinder);
// Process (connect)
QObject::connect(ui.meshsurfaceAction, &QAction::triggered, this, &CloudViewer::convertSurface);
QObject::connect(ui.wireframeAction, &QAction::triggered, this, &CloudViewer::convertWireframe);
// Option (connect)
ui.windowsThemeAction->setData(QVariant(CLOUDVIEWER_THEME_WINDOWS));
ui.darculaThemeAction->setData(QVariant(CLOUDVIEWER_THEME_DARCULA));
ui.englishAction->setData(QVariant(CLOUDVIEWER_LANG_ENGLISH));
ui.chineseAction->setData(QVariant(CLOUDVIEWER_LANG_CHINESE));
connect(ui.windowsThemeAction, SIGNAL(triggered()), this, SLOT(changeTheme()));
connect(ui.darculaThemeAction, SIGNAL(triggered()), this, SLOT(changeTheme()));
connect(ui.englishAction, SIGNAL(triggered()), this, SLOT(changeLanguage()));
connect(ui.chineseAction, SIGNAL(triggered()), this, SLOT(changeLanguage()));
// About (connect)
QObject::connect(ui.aboutAction, &QAction::triggered, this, &CloudViewer::about);
QObject::connect(ui.helpAction, &QAction::triggered, this, &CloudViewer::help);
/***** Slots connection of RGB widget *****/
// Random color (connect)
connect(ui.colorBtn, SIGNAL(clicked()), this, SLOT(colorBtnPressed()));
// Connection between RGB slider and RGB value (connect)
connect(ui.rSlider, SIGNAL(valueChanged(int)), this, SLOT(rSliderChanged(int)));
connect(ui.gSlider, SIGNAL(valueChanged(int)), this, SLOT(gSliderChanged(int)));
connect(ui.bSlider, SIGNAL(valueChanged(int)), this, SLOT(bSliderChanged(int)));
// RGB slider released (connect)
connect(ui.rSlider, SIGNAL(sliderReleased()), this, SLOT(RGBsliderReleased()));
connect(ui.gSlider, SIGNAL(sliderReleased()), this, SLOT(RGBsliderReleased()));
connect(ui.bSlider, SIGNAL(sliderReleased()), this, SLOT(RGBsliderReleased()));
// Change size of cloud (connect)
//connect(ui.pSlider, SIGNAL(valueChanged(int)), ui.sizeLCD, SLOT(display(int)));
connect(ui.pSlider, SIGNAL(valueChanged(int)), this, SLOT(pSliderChanged(int)));
}
void CloudViewer::test22()
{
std::cout << "test_ " << std::endl;
}
CloudViewer::~CloudViewer() {
}
void CloudViewer::doOpen(const QStringList& filePathList) {
// Open point cloud file one by one
for (int i = 0; i != filePathList.size(); i++) {
timeStart(); // time start
mycloud.cloud.reset(new PointCloudT); // Reset cloud
QFileInfo fileInfo(filePathList[i]);
std::string filePath = fromQString(fileInfo.filePath());
std::string fileName = fromQString(fileInfo.fileName());
// begin loading
ui.statusBar->showMessage(
fileInfo.fileName() + ": " + QString::number(i) + "/" + QString::number(filePathList.size())
+ " point cloud loading..."
);
mycloud = fileIO.load(fileInfo);
if (!mycloud.isValid) {
// TODO: deal with the error, print error info in console?
debug("invalid cloud.");
continue;
}
mycloud.viewer = viewer;
mycloud_vec.push_back(mycloud);
timeCostSecond = timeOff(); // time off
consoleLog(
"Open",
toQString(mycloud.fileName),
toQString(mycloud.filePath),
"Time cost: " + timeCostSecond + " s, Points: " + QString::number(mycloud.cloud->points.size())
);
// update tree widget
QTreeWidgetItem* cloudName = new QTreeWidgetItem(QStringList()
<< toQString(mycloud.fileName));
cloudName->setIcon(0, QIcon(":/Resources/images/icon.png"));
ui.dataTree->addTopLevelItem(cloudName);
total_points += mycloud.cloud->points.size();
}
ui.statusBar->showMessage("");
showPointcloudAdd();
setPropertyTable();
}
// Open point cloud
void CloudViewer::open() {
std::cout << "test_ " << std::endl;
QStringList filePathList = QFileDialog::getOpenFileNames(
this,
tr("Open point cloud file"),
toQString(mycloud.fileDir),
toQString(fileIO.getInputFormatsStr())
);
if (filePathList.isEmpty()) return;
// Clear cache
// TODO: abstract a function
mycloud_vec.clear();
total_points = 0;
ui.dataTree->clear();
viewer->removeAllPointClouds();
doOpen(filePathList);
}
// Add Point Cloud
void CloudViewer::add() {
QStringList filePathList = QFileDialog::getOpenFileNames(
this,
tr("Add point cloud file"),
toQString(mycloud.fileDir),
toQString(fileIO.getInputFormatsStr())
);
if (filePathList.isEmpty()) return;
doOpen(filePathList);
}
// Clear all point clouds
void CloudViewer::clear() {
mycloud_vec.clear(); // 从点云容器中移除所有点云
viewer->removeAllPointClouds(); // 从viewer中移除所有点云
viewer->removeAllShapes(); // 这个remove更彻底
ui.dataTree->clear(); // 将dataTree清空
ui.propertyTable->clear(); // 清空属性窗口propertyTable
QStringList header;
header << "Property" << "Value";
ui.propertyTable->setHorizontalHeaderLabels(header);
// 输出窗口
consoleLog("Clear", "All point clouds", "", "");
setWindowTitle("CloudViewer"); // 更新窗口标题
showPointcloud(); // 更新显示
}
// Save point cloud
void CloudViewer::save() {
if (!mycloud.isValid) {
QMessageBox::critical(this, tr("Saving file error"),
tr("There is no point cloud to save"));
return;
}
// get binary flag from sender()
QAction* action = qobject_cast<QAction*>(sender());
QVariant v = action->data();
bool isSaveBinary = (bool)v.value<bool>();
QString selectedFilter = toQString(fileIO.outputFiltersMap.at(mycloud.fileSuffix));
QString saveFilePath = QFileDialog::getSaveFileName(
this, // parent
toQString("Save point cloud" + string(isSaveBinary ? " (binary)" : "")), // caption
toQString(mycloud.filePath), // dir
toQString(fileIO.getOutputFormatsStr()), // filter
&selectedFilter // selected filter
);
if (saveFilePath.isEmpty()) return;
QFileInfo fileInfo(saveFilePath);
QString saveFileName = fileInfo.fileName();
string saveFilePathStd = fromQString(saveFilePath);
string saveFileNameStd = fromQString(saveFileName);
if (mycloud_vec.size() > 1) {
savemulti(fileInfo, isSaveBinary);
return;
}
bool saveStatus = fileIO.save(mycloud, fileInfo, isSaveBinary);
if (!saveStatus) {
QMessageBox::critical(this, tr("Saving file error"),
tr("We can not save the file"));
return;
}
consoleLog("Save", saveFileName, saveFilePath, "Single save");
setWindowTitle(saveFilePath + " - CloudViewer");
QMessageBox::information(this, tr("save point cloud file"),
toQString("Save " + saveFileNameStd + " successfully!"));
}
// Save multi point cloud
void CloudViewer::savemulti(const QFileInfo& fileInfo, bool isSaveBinary) {
string subname = fromQString(fileInfo.fileName());
QString saveFilePath = fileInfo.filePath();
PointCloudT::Ptr multi_cloud;
multi_cloud.reset(new PointCloudT);
multi_cloud->height = 1;
int sum = 0;
for (auto c : mycloud_vec) {
sum += c.cloud->points.size();
}
multi_cloud->width = sum;
multi_cloud->resize(multi_cloud->height * multi_cloud->width);
int k = 0;
for (int i = 0; i != mycloud_vec.size(); ++i) {
// 注意cloudvec[i]->points.size()和cloudvec[i]->size()的区别
for (int j = 0; j != mycloud_vec[i].cloud->points.size(); ++j) {
multi_cloud->points[k].x = mycloud_vec[i].cloud->points[j].x;
multi_cloud->points[k].y = mycloud_vec[i].cloud->points[j].y;
multi_cloud->points[k].z = mycloud_vec[i].cloud->points[j].z;
multi_cloud->points[k].r = mycloud_vec[i].cloud->points[j].r;
multi_cloud->points[k].g = mycloud_vec[i].cloud->points[j].g;
multi_cloud->points[k].b = mycloud_vec[i].cloud->points[j].b;
k++;
}
}
MyCloud multiMyCloud;
multiMyCloud.cloud = multi_cloud;
multiMyCloud.isValid = true;
// save multi_cloud
bool saveStatus = fileIO.save(multiMyCloud, fileInfo, isSaveBinary);
if (!saveStatus) {
QMessageBox::critical(this, tr("Saving file error"),
tr("We can not save the file"));
return;
}
if (isSaveBinary) {
consoleLog("Save as binary", QString::fromLocal8Bit(subname.c_str()), saveFilePath, "Multi save (binary)");
}
else {
consoleLog("Save", QString::fromLocal8Bit(subname.c_str()), saveFilePath, "Multi save");
}
// 将保存后的 multi_cloud 设置为当前 mycloud,以便保存之后直接进行操作
mycloud.cloud = multi_cloud;
mycloud.filePath = fromQString(saveFilePath);
mycloud.fileName = subname;
setWindowTitle(saveFilePath + " - CloudViewer");
QMessageBox::information(this, tr("save point cloud file"), toQString("Save " + subname + " successfully!"));
}
// 退出程序
void CloudViewer::exit() {
this->close();
}
// Generate cube
void CloudViewer::cube() {
mycloud.cloud.reset(new PointCloudT);
total_points = 0;
ui.dataTree->clear(); // 清空资源管理器的item
viewer->removeAllPointClouds(); // 从viewer中移除所有点云
mycloud_vec.clear(); // 清空点云容器
mycloud.cloud->width = 50000; // 设置点云宽
mycloud.cloud->height = 1; // 设置点云高,高为1,说明为无组织点云
mycloud.cloud->is_dense = false;
mycloud.cloud->resize(mycloud.cloud->width * mycloud.cloud->height); // 重置点云大小
for (size_t i = 0; i != mycloud.cloud->size(); ++i)
{
mycloud.cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
mycloud.cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
mycloud.cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
mycloud.cloud->points[i].r = red;
mycloud.cloud->points[i].g = green;
mycloud.cloud->points[i].b = blue;
}
// 设置资源管理器
QTreeWidgetItem* cloudName = new QTreeWidgetItem(QStringList() << QString::fromLocal8Bit("cube"));
cloudName->setIcon(0, QIcon(":/Resources/images/icon.png"));
ui.dataTree->addTopLevelItem(cloudName);
// 输出窗口
consoleLog("Generate cube", "cube", "cube", "");
mycloud_vec.push_back(mycloud);
showPointcloudAdd();
}
// 初始化
void CloudViewer::initial() {
// 界面初始化
setWindowIcon(QIcon(tr(":/Resources/images/icon.png")));
setWindowTitle(tr("CloudViewer"));
// 点云初始化
mycloud.cloud.reset(new PointCloudT);
mycloud.cloud->resize(1);
viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false));
// viewer->addPointCloud(cloud, "cloud");
ui.screen->SetRenderWindow(viewer->getRenderWindow());
viewer->setupInteractor(ui.screen->GetInteractor(), ui.screen->GetRenderWindow());
ui.screen->update();
ui.propertyTable->setSelectionMode(QAbstractItemView::NoSelection); // 禁止点击属性管理器的 item
ui.consoleTable->setSelectionMode(QAbstractItemView::NoSelection); // 禁止点击输出窗口的 item
ui.dataTree->setSelectionMode(QAbstractItemView::ExtendedSelection); // 允许 dataTree 进行多选
// 设置默认主题
QString qss = darcula_qss;
qApp->setStyleSheet(qss);
setPropertyTable();
setConsoleTable();
// 输出窗口
consoleLog("Software start", "CloudViewer", "Welcome to use CloudViewer", "Nightn");
// 设置背景颜色为 dark
viewer->setBackgroundColor(30 / 255.0, 30 / 255.0, 30 / 255.0);
}
// 显示点云,不重置相机角度
void CloudViewer::showPointcloud() {
for (int i = 0; i != mycloud_vec.size(); i++)
{
viewer->updatePointCloud(mycloud_vec[i].cloud, mycloud_vec[i].cloudId);
}
// viewer->resetCamera();
ui.screen->update();
}
// 添加点云到viewer,并显示点云
void CloudViewer::showPointcloudAdd() {
for (int i = 0; i != mycloud_vec.size(); i++) {
viewer->addPointCloud(mycloud_vec[i].cloud, mycloud_vec[i].cloudId);
viewer->updatePointCloud(mycloud_vec[i].cloud, mycloud_vec[i].cloudId);
}
viewer->resetCamera();
ui.screen->update();
}
void CloudViewer::setCloudColor(unsigned int r, unsigned int g, unsigned int b) {
// Set the new color
for (size_t i = 0; i < mycloud.cloud->size(); i++) {
mycloud.cloud->points[i].r = r;
mycloud.cloud->points[i].g = g;
mycloud.cloud->points[i].b = b;
mycloud.cloud->points[i].a = 255;
}
}
// 关于
void CloudViewer::about() {
AboutWin* aboutwin = new AboutWin(this);
aboutwin->setModal(true);
aboutwin->show();
consoleLog("About", "Nightn", "http://nightn.github.io", "Welcome to my blog!");
}
// 帮助
void CloudViewer::help() {
QDesktopServices::openUrl(QUrl(QLatin1String("http://nightn.github.io/cloudviewer")));
consoleLog("Help", "Cloudviewer help", "http://nightn.github.io/cloudviewer", "");
}
// 绘制基本图形
void CloudViewer::createSphere() {
mycloud.cloud.reset(new PointCloudT);
ui.dataTree->clear(); // 清空资源管理器的item
viewer->removeAllShapes();
mycloud_vec.clear(); // 清空点云容器
pcl::PointXYZ p;
p.x = 0; p.y = 0; p.z = 0;
viewer->addSphere(p, 100, "sphere1");
viewer->resetCamera();
ui.screen->update();
// 输出窗口
consoleLog("Create sphere", "Sphere", "", "Succeeded");
}
void CloudViewer::createCylinder() {
mycloud.cloud.reset(new PointCloudT);
ui.dataTree->clear(); // 清空资源管理器的item
viewer->removeAllShapes();
mycloud_vec.clear(); // 清空点云容器
viewer->addCylinder(*(new pcl::ModelCoefficients()), "cylinder");
viewer->resetCamera();
ui.screen->update();
// 输出窗口
consoleLog("Create cylinder", "Cylinder", "", "Failed");
}
// Change theme: Windows/Darcula
void CloudViewer::changeTheme() {
QAction* action = qobject_cast<QAction*>(sender());
QVariant v = action->data();
int theme = (int)v.value<int>();
QColor colorLight(241, 241, 241, 255);
QColor colorDark(0, 0, 0, 255);
QString qss;
switch (theme) {
case CLOUDVIEWER_THEME_WINDOWS: {
qss = windows_qss;
for (int i = 0; i != mycloud_vec.size(); i++) {
if (ui.dataTree->topLevelItem(i)->textColor(0) == colorLight) {
ui.dataTree->topLevelItem(i)->setTextColor(0, colorDark);
}
}
theme_id = 0;
consoleLog("Change theme", "Windows theme", "", "");
break;
}
case CLOUDVIEWER_THEME_DARCULA: {
qss = darcula_qss;
for (int i = 0; i != mycloud_vec.size(); i++) {
if (ui.dataTree->topLevelItem(i)->textColor(0) == colorDark) {
ui.dataTree->topLevelItem(i)->setTextColor(0, colorLight);
}
}
consoleLog("Change theme", "Darcula theme", "", "");
theme_id = 1;
break;
}
}
qApp->setStyleSheet(qss);
}
// Change language: English/Chinese
void CloudViewer::changeLanguage() {
QAction* action = qobject_cast<QAction*>(sender());
QVariant v = action->data();
int language = (int)v.value<int>();
switch (language) {
case CLOUDVIEWER_LANG_ENGLISH: {
consoleLog("Change language", "English", "", "");
break;
}
case CLOUDVIEWER_LANG_CHINESE: {
consoleLog("Change language", "Chinese", "Doesn't support Chinese temporarily", "");
break;
}
}
}
/*********************************************/
/*****************界面槽函数*****************/
/********************************************/
void CloudViewer::colorBtnPressed() {
QList<QTreeWidgetItem*> itemList = ui.dataTree->selectedItems();
int selected_item_count = ui.dataTree->selectedItems().size();
// 如果未选中任何点云,则对视图窗口中的所有点云进行着色
if (selected_item_count == 0) {
for (int i = 0; i != mycloud_vec.size(); i++) {
for (int j = 0; j != mycloud_vec[i].cloud->points.size(); j++) {
mycloud_vec[i].cloud->points[j].r = 255 * (1024 * rand() / (RAND_MAX + 1.0f));
mycloud_vec[i].cloud->points[j].g = 255 * (1024 * rand() / (RAND_MAX + 1.0f));
mycloud_vec[i].cloud->points[j].b = 255 * (1024 * rand() / (RAND_MAX + 1.0f));
}
}
// 输出窗口
consoleLog("Random color", "All point clous", "", "");
}
else {
for (int i = 0; i != selected_item_count; i++) {
int cloud_id = ui.dataTree->indexOfTopLevelItem(itemList[i]);
for (int j = 0; j != mycloud_vec[cloud_id].cloud->size(); j++) {
mycloud_vec[cloud_id].cloud->points[j].r = red;
mycloud_vec[cloud_id].cloud->points[j].g = 255 * (1024 * rand() / (RAND_MAX + 1.0f));
mycloud_vec[cloud_id].cloud->points[j].b = 255 * (1024 * rand() / (RAND_MAX + 1.0f));
}
}
// 输出窗口
consoleLog("Random color", "Point clouds selected", "", "");
}
showPointcloud();
}
void CloudViewer::RGBsliderReleased() {
QList<QTreeWidgetItem*> itemList = ui.dataTree->selectedItems();
int selected_item_count = ui.dataTree->selectedItems().size();
// 如果未选中任何点云,则对视图窗口中的所有点云进行着色
if (selected_item_count == 0) {
for (int i = 0; i != mycloud_vec.size(); i++) {
mycloud_vec[i].setPointColor(red, green, blue);
}
// 输出窗口
consoleLog("Change cloud color", "All point clouds", QString::number(red) + " " + QString::number(green) + " " + QString::number(blue), "");
}
else {
for (int i = 0; i != selected_item_count; i++) {
int cloud_id = ui.dataTree->indexOfTopLevelItem(itemList[i]);
mycloud_vec[cloud_id].setPointColor(red, green, blue);
}
// 输出窗口
consoleLog("Change cloud color", "Point clouds selected", QString::number(red) + " " + QString::number(green) + " " + QString::number(blue), "");
}
showPointcloud();
}
// 设置所有点云的尺寸
void CloudViewer::psliderReleased() {
std::cout << "test_ " << std::endl;
int intValue = ui.sizeLCD->intValue();
QList<QTreeWidgetItem*> itemList = ui.dataTree->selectedItems();
int selected_item_count = ui.dataTree->selectedItems().size();
if (selected_item_count == 0) {
for (int i = 0; i != mycloud_vec.size(); i++) {
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
p, mycloud_vec[i].cloudId);
}
// 输出窗口
consoleLog("Change cloud size", "All point clouds", "Size: " + QString::number(p), "");
}
else {
for (int i = 0; i != selected_item_count; i++) {
int cloud_id = ui.dataTree->indexOfTopLevelItem(itemList[i]);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
p, mycloud_vec[i].cloudId);
}
// 输出窗口
consoleLog("Change cloud size", "Point clouds selected", "Size: " + QString::number(p), "");
}
ui.screen->update();
}
void CloudViewer::pSliderChanged(int value) {
std::cout << "test_ " << std::endl;
p = value;
ui.sizeLCD->display(value);
}
void CloudViewer::rSliderChanged(int value) {
red = value;
ui.rLCD->display(value);
}
void CloudViewer::gSliderChanged(int value) {
green = value;
ui.gLCD->display(value);
}
void CloudViewer::bSliderChanged(int value) {
blue = value;
ui.bLCD->display(value);
}
void CloudViewer::cooCbxChecked(int value) {
switch (value) {
case 0: {
viewer->removeCoordinateSystem();
consoleLog("Remove coordinate system", "Remove", "", "");
break;
}
case 2: {
viewer->addCoordinateSystem();
consoleLog("Add coordinate system", "Add", "", "");
break;
}
}
ui.screen->update();
}
void CloudViewer::bgcCbxChecked(int value) {
switch (value) {
case 0: {
viewer->setBackgroundColor(30 / 255.0, 30 / 255.0, 30 / 255.0);
consoleLog("Change bg color", "Background", "30 30 30", "");
break;
}
case 2: {
// !注意:setBackgroundColor()接收的是0-1的double型参数
viewer->setBackgroundColor(240 / 255.0, 240 / 255.0, 240 / 255.0);
consoleLog("Change bg color", "Background", "240 240 240", "");
break;
}
}
ui.screen->update();
}
// 通过颜色对话框改变点云颜色
void CloudViewer::pointcolorChanged() {
QColor color = QColorDialog::getColor(Qt::white, this, "Select color for point cloud");
if (color.isValid()) {
// QAction* action = dynamic_cast<QAction*>(sender());
// if (action != ui.pointcolorAction) // 改变颜色的信号来自于 dataTree
QList<QTreeWidgetItem*> itemList = ui.dataTree->selectedItems();
int selected_item_count = ui.dataTree->selectedItems().size();
if (selected_item_count == 0) {
for (int i = 0; i != mycloud_vec.size(); ++i) {
mycloud_vec[i].setPointColor(color.red(), color.green(), color.blue());
}
// 输出窗口
consoleLog("Change cloud color", "All point clouds", QString::number(color.red()) + " " + QString::number(color.green()) + " " + QString::number(color.blue()), "");
}
else {
for (int i = 0; i != selected_item_count; i++) {
int cloud_id = ui.dataTree->indexOfTopLevelItem(itemList[i]);
mycloud_vec[cloud_id].setPointColor(color.red(), color.green(), color.blue());
}
// 输出窗口
consoleLog("Change cloud color", "Point clouds selected", QString::number(color.red()) + " " + QString::number(color.green()) + " " + QString::number(color.blue()), "");
}
// 颜色的改变同步至RGB停靠窗口
ui.rSlider->setValue(color.red());
ui.gSlider->setValue(color.green());
ui.bSlider->setValue(color.blue());
showPointcloud();
}
}
// 通过颜色对话框改变背景颜色
void CloudViewer::bgcolorChanged() {
QColor color = QColorDialog::getColor(Qt::white, this,
"Select color for point cloud");
if (color.isValid()) {
viewer->setBackgroundColor(color.red() / 255.0,
color.green() / 255.0, color.blue() / 255.0);
// 输出窗口
consoleLog("Change bg color", "Background", QString::number(color.red()) + " " + QString::number(color.green()) + " " + QString::number(color.blue()), "");
showPointcloud();
}
}
// 三视图
void CloudViewer::mainview() {
viewer->setCameraPosition(0, -1, 0, 0.5, 0.5, 0.5, 0, 0, 1);
ui.screen->update();
}
void CloudViewer::leftview() {
viewer->setCameraPosition(-1, 0, 0, 0, 0, 0, 0, 0, 1);
ui.screen->update();
}
void CloudViewer::topview() {
viewer->setCameraPosition(0, 0, 1, 0, 0, 0, 0, 1, 0);
ui.screen->update();
}
// 设置属性管理窗口
void CloudViewer::setPropertyTable() {
QStringList header;
header << "Property" << "Value";
ui.propertyTable->setHorizontalHeaderLabels(header);
ui.propertyTable->setItem(0, 0, new QTableWidgetItem("Clouds"));
ui.propertyTable->setItem(0, 1, new QTableWidgetItem(QString::number(mycloud_vec.size())));
ui.propertyTable->setItem(1, 0, new QTableWidgetItem("Points"));
ui.propertyTable->setItem(1, 1, new QTableWidgetItem(""));
ui.propertyTable->setItem(2, 0, new QTableWidgetItem("Faces"));
ui.propertyTable->setItem(2, 1, new QTableWidgetItem(""));
ui.propertyTable->setItem(3, 0, new QTableWidgetItem("Total points"));
ui.propertyTable->setItem(3, 1, new QTableWidgetItem(QString::number(total_points)));
ui.propertyTable->setItem(4, 0, new QTableWidgetItem("RGB"));
ui.propertyTable->setItem(4, 1, new QTableWidgetItem(""));
}
void CloudViewer::setConsoleTable() {
// 设置输出窗口
QStringList header2;
header2 << "Time" << "Operation" << "Operation object" << "Details" << "Note";
ui.consoleTable->setHorizontalHeaderLabels(header2);
ui.consoleTable->setColumnWidth(0, 150);
ui.consoleTable->setColumnWidth(1, 200);
ui.consoleTable->setColumnWidth(2, 200);
ui.consoleTable->setColumnWidth(3, 300);
// ui.consoleTable->setEditTriggers(QAbstractItemView::NoEditTriggers); // 设置不可编辑
ui.consoleTable->verticalHeader()->setDefaultSectionSize(22); // 设置行距
ui.consoleTable->setContextMenuPolicy(Qt::CustomContextMenu);
}
void CloudViewer::consoleLog(QString operation, QString subname, QString filename, QString note) {
if (enable_console == false) {
return;
}
int rows = ui.consoleTable->rowCount();
ui.consoleTable->setRowCount(++rows);
QDateTime time = QDateTime::currentDateTime(); // 获取系统现在的时间
QString time_str = time.toString("MM-dd hh:mm:ss"); // 设置显示格式
ui.consoleTable->setItem(rows - 1, 0, new QTableWidgetItem(time_str));
ui.consoleTable->setItem(rows - 1, 1, new QTableWidgetItem(operation));
ui.consoleTable->setItem(rows - 1, 2, new QTableWidgetItem(subname));
ui.consoleTable->setItem(rows - 1, 3, new QTableWidgetItem(filename));
ui.consoleTable->setItem(rows - 1, 4, new QTableWidgetItem(note));
ui.consoleTable->scrollToBottom(); // 滑动自动滚到最底部
}
// QTreeWidget的item的点击相应函数
void CloudViewer::itemSelected(QTreeWidgetItem* item, int count) {
count = ui.dataTree->indexOfTopLevelItem(item); // 获取item的行号
for (int i = 0; i != mycloud_vec.size(); i++)
{
viewer->updatePointCloud(mycloud_vec[i].cloud, mycloud_vec[i].cloudId);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, mycloud_vec[i].cloudId);
}
// 提取当前点云的RGB,点云数量等信息
int cloud_size = mycloud_vec[count].cloud->points.size();
unsigned int cloud_r = mycloud_vec[count].cloud->points[0].r;
unsigned int cloud_g = mycloud_vec[count].cloud->points[0].g;
unsigned int cloud_b = mycloud_vec[count].cloud->points[0].b;
bool multi_color = true;
if (mycloud_vec[count].cloud->points.begin()->r == (mycloud_vec[count].cloud->points.end() - 1)->r) // 判断点云单色多色的条件(不是很严谨)
multi_color = false;
ui.propertyTable->setItem(0, 1, new QTableWidgetItem(QString::number(mycloud_vec.size())));
ui.propertyTable->setItem(1, 1, new QTableWidgetItem(QString::number(cloud_size)));
int faces = mycloud_vec[count].meshId.size() != 0 ? mycloud_vec[count].mesh->polygons.size() : 0;
ui.propertyTable->setItem(2, 1, new QTableWidgetItem(QString::number(faces)));
ui.propertyTable->setItem(3, 1, new QTableWidgetItem(QString::number(total_points)));
ui.propertyTable->setItem(4, 1, new QTableWidgetItem(multi_color ? "Multi Color" : (QString::number(cloud_r) + " " + QString::number(cloud_g) + " " + QString::number(cloud_b))));
// 选中item所对应的点云尺寸变大
QList<QTreeWidgetItem*> itemList = ui.dataTree->selectedItems();
int selected_item_count = ui.dataTree->selectedItems().size();
for (int i = 0; i != selected_item_count; i++) {
int cloud_id = ui.dataTree->indexOfTopLevelItem(itemList[i]);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
2, mycloud_vec[i].cloudId);
}
// mycloud = mycloud_vec[count];
ui.screen->update();
}
// consoleTable 右击响应事件
void CloudViewer::popMenuInConsole(const QPoint&) {
QAction clearConsoleAction("Clear console", this);
QAction enableConsoleAction("Enable console", this);
QAction disableConsoleAction("Disable console", this);
connect(&clearConsoleAction, &QAction::triggered, this, &CloudViewer::clearConsole);
connect(&enableConsoleAction, &QAction::triggered, this, &CloudViewer::enableConsole);
connect(&disableConsoleAction, &QAction::triggered, this, &CloudViewer::disableConsole);
QPoint pos;
QMenu menu(ui.dataTree);
menu.addAction(&clearConsoleAction);
menu.addAction(&enableConsoleAction);
menu.addAction(&disableConsoleAction);
if (enable_console == true) {
menu.actions()[1]->setVisible(false);
menu.actions()[2]->setVisible(true);
}
else {
menu.actions()[1]->setVisible(true);
menu.actions()[2]->setVisible(false);
}
menu.exec(QCursor::pos()); // 在当前鼠标位置显示
}
// 清空 consoleTable
void CloudViewer::clearConsole() {
ui.consoleTable->clearContents();
ui.consoleTable->setRowCount(0);
}
// 允许使用 consoleTable
void CloudViewer::enableConsole() {
enable_console = true;
}
// 禁用 consoleTable
void CloudViewer::disableConsole() {
clearConsole();
enable_console = false;
}
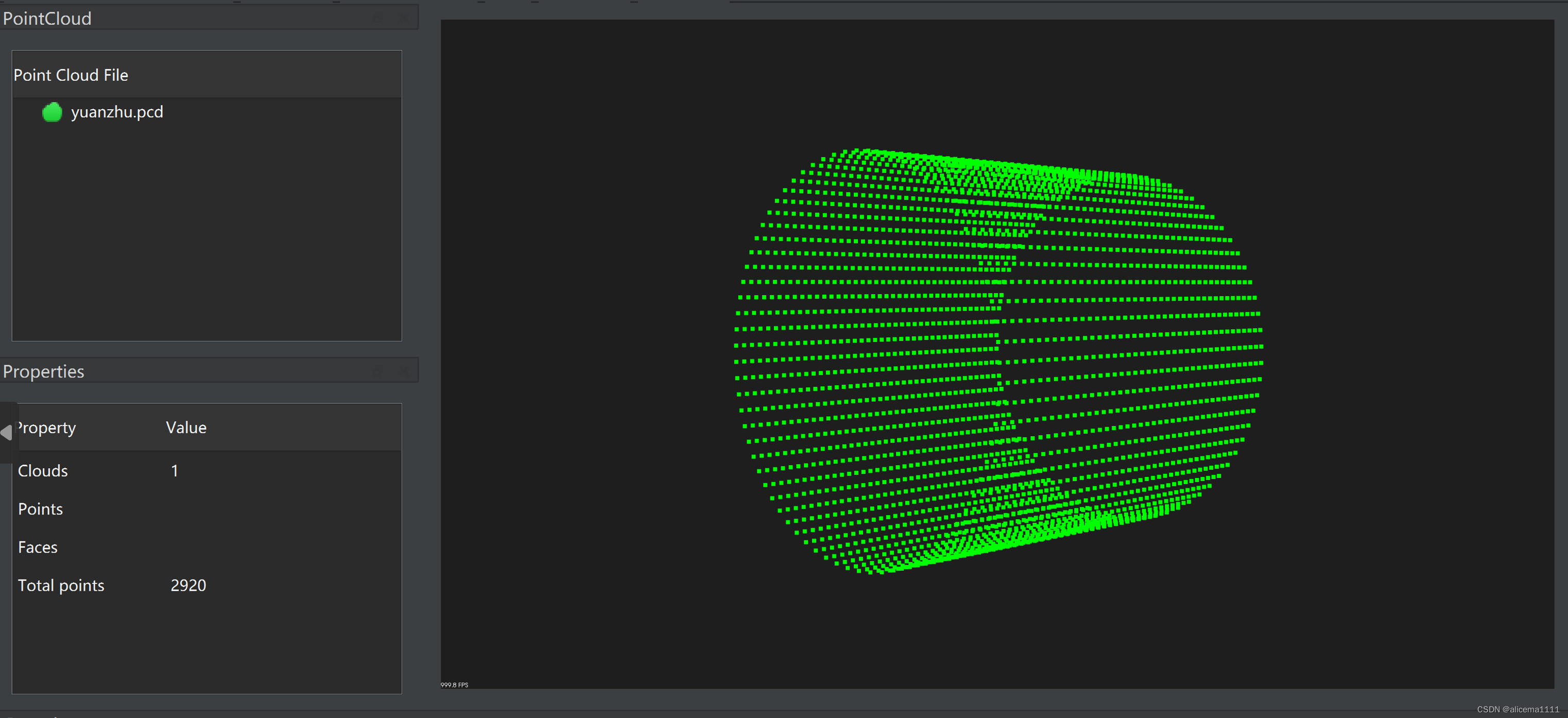
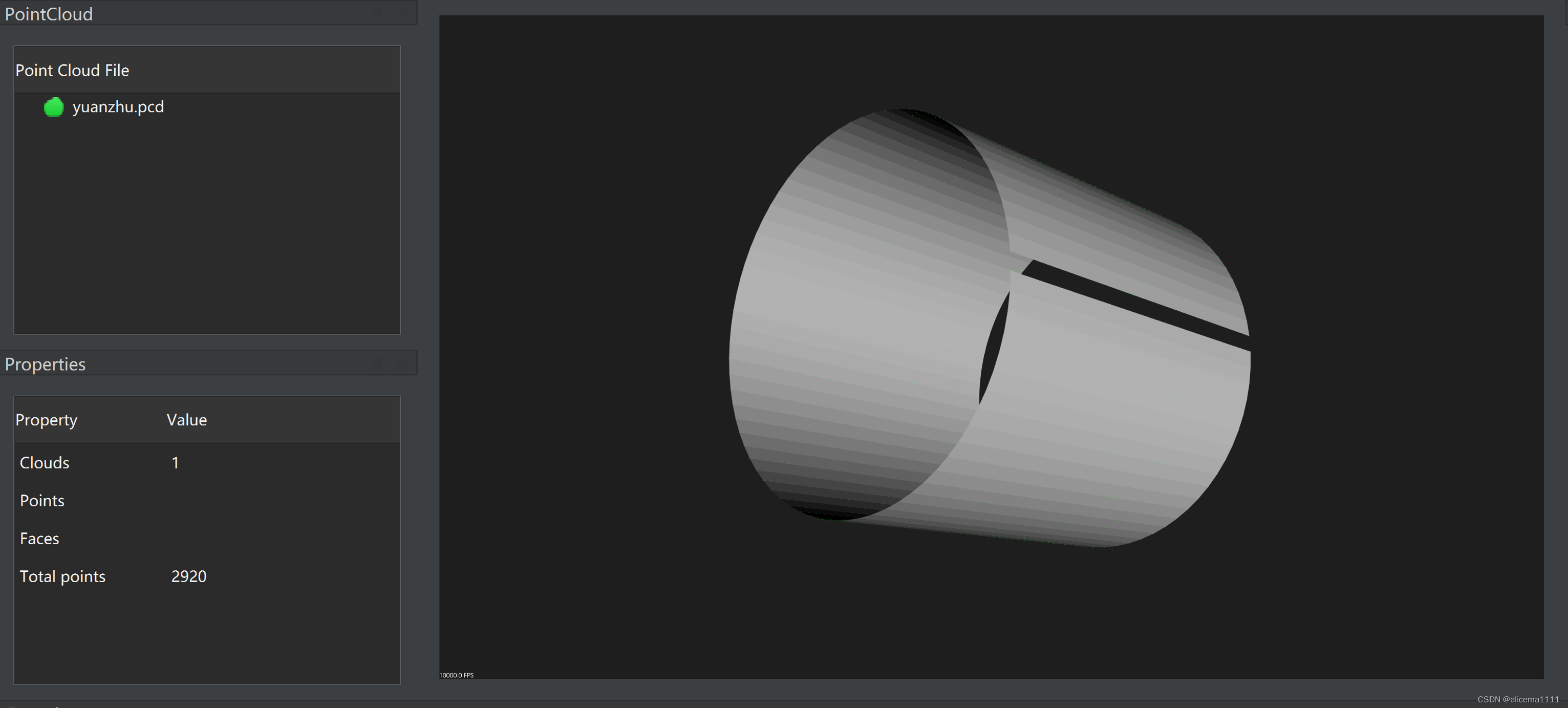
3. Running results

3. Online assistance:
If you need to install the operating environment or remote debugging, see the personal QQ business card at the bottom of the article, and professional and technical personnel will assist remotely!
1) Remote installation and operation environment, code debugging
2) Qt, C++, Python entry guide
3) Interface beautification
4) Software production
Current article link: Python+Qt desktop and webpage human customer service communication tool_alicema1111's blog-CSDN blog
Blogger recommended article: python face recognition statistics qt form - CSDN Blog
Blogger recommended article: Python Yolov5 flame smoke recognition source code sharing - CSDN blog
Personal blog homepage: alicema1111's blog_CSDN blog-Python, C++, bloggers in the field of web pages
Click here for all the blogger’s articles : alicema1111’s Blog_CSDN Blog-Python, C++, Bloggers in the Web Field