Based on the yolo target detection algorithm, the vehicle and pedestrian detection in the road ahead can be estimated, and the distance between the target and the vehicle can be estimated
1. Video display
yolo vehicle distance 1
Subscribe to the column to get the source code (provide complete code, no need to read below)
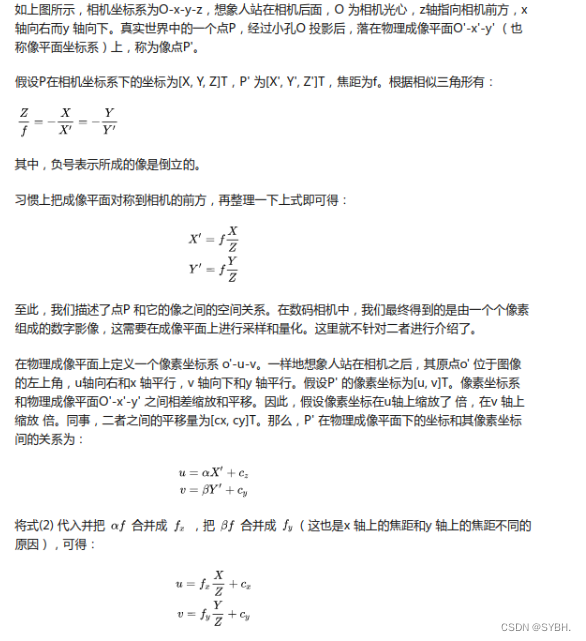
2. The principle of monocular distance measurement
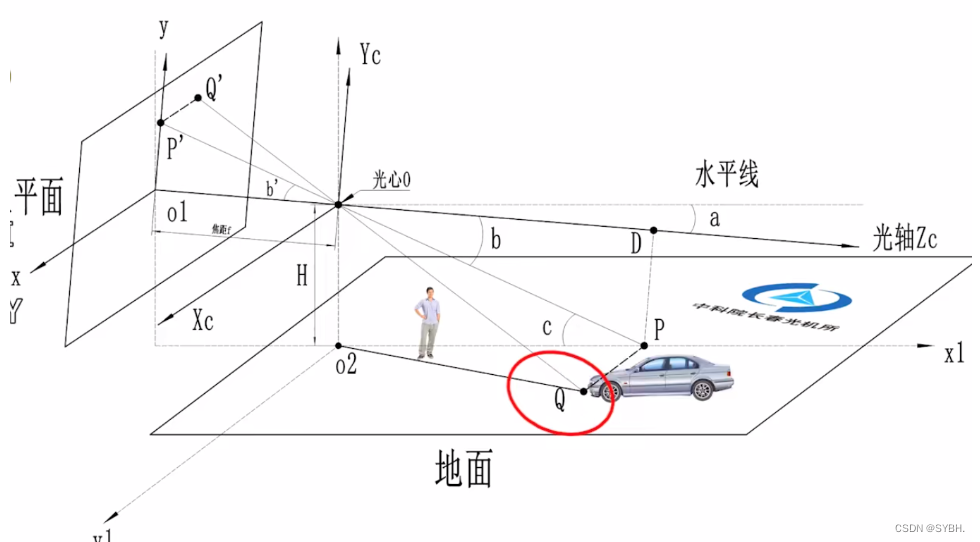
There is a vehicle in the picture, and the vehicle is on the ground, its grounding point Q must be on the ground. Then the depth of point Q can be solved. The specific solution steps are too lazy to type the formula, so I took a screenshot. In the monocular ranging process, the Q point on the actual object corresponds to the Q' point on the imaged picture, and the distance between the Q' point and the o1 point along the y-axis is o1p'. Divide this distance o1p' by the y-axis pixel focal length fy (unit is pixel), and then find the arctan to get the angle b'. Then it is easy to understand by following the steps in the figure.