I published the target detection algorithm improvement column before, but for what scenario it is applied to, what improvement method is needed to be effective for its own application scenario, and how many improvements can be published at what level of articles, in order to solve everyone's confusion, this series of articles aims to I will explain to you the SCI papers published in high-level academic journals , and introduce the corresponding SCI journals to help you answer your doubts and facilitate the submission of scientific research papers. For the series of articles interpreted, I will reproduce the innovative point code , and friends in need can pay attention to private messages and get them.

1. Summary
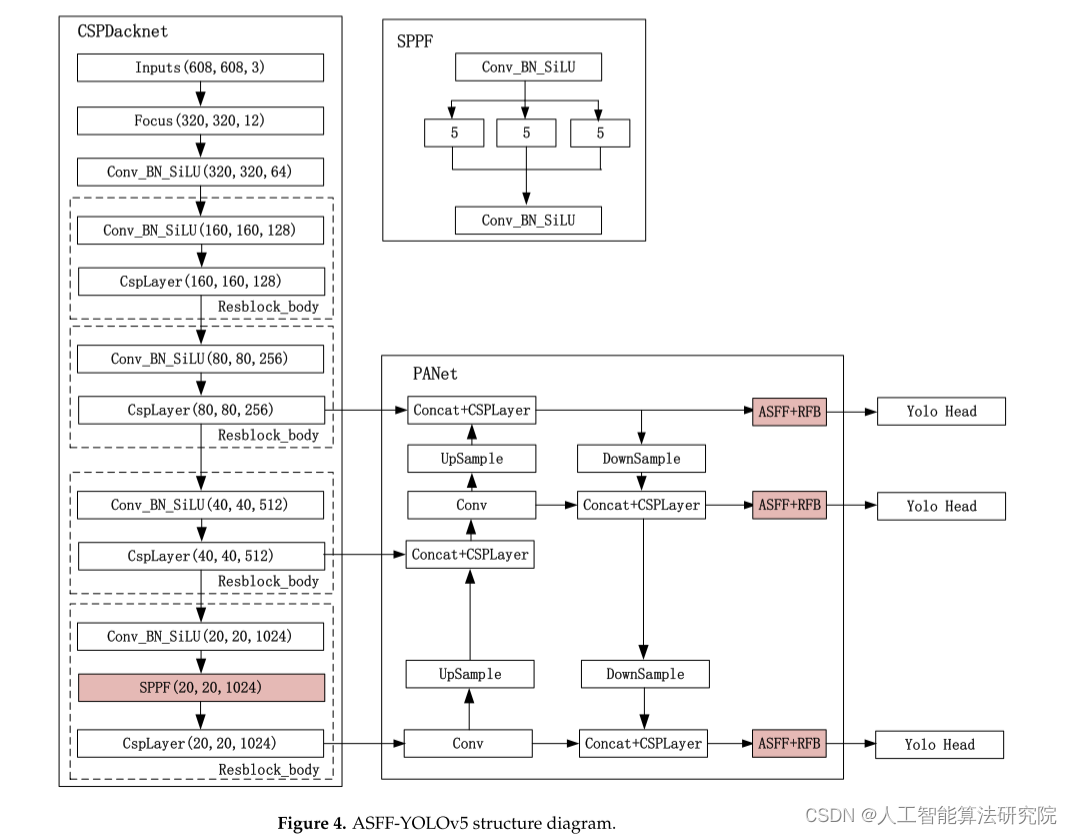
ASFF-YOLOv5: A multi-element detection method for road traffic in UAV images based on multi-scale feature fusion Road traffic elements are an important part of roads and the main elements of building a basic traffic geographic information database. However, the following problems still exist in the detection and recognition of road traffic elements: dense elements, poor multi-scale object detection, and small objects are easily affected by occlusion factors. To this end, an Adaptive Spatial Feature Fusion (ASFF) YOLOv 5 network (ASFF-YOLOv 5) is proposed for automatic identification and detection of multi-scale road traffic elements. First, the K-means++ algorithm is used to cluster and count the range of multi-scale road traffic elements to obtain the candidate frame size suitable for the data set. Then, the Spatial Pyramid Pooling Fast (SPPF) structure is used to improve classification accuracy and speed while enabling richer feature information extraction. A receptive field block (RFB) based ASFF strategy is proposed to improve feature scale invariance and enhance small object detection. Finally, the experimental effect was evaluated by calculating the mean precision (mAP). The experimental results show that the mAP value of this method is 93.1%, which is 19.2% higher than the original YOLOv 5 model.
2. Network model and core innovation points
1. Use the K-means++ algorithm to cluster and count the range of multi-scale road traffic elements to obtain the size of the candidate frame suitable for the data set.
2. Spatial Pyramid Pool Fast (SPPF) structure, used to improve classification accuracy and speed, while achieving richer feature information extraction.
3. Propose an ASFF strategy based on the receptive field block (RFB) to improve the feature scale invariance and enhance the detection effect of small targets.
3. Experimental results (partial display)
1. Comparative experiments: In order to verify the effectiveness of the method, this paper compares the classic object detection network algorithms. SSD, Retinanet, Faster R-CNN, YOLOv 3 YOLOv 4, YOLOv 5 networks as well as previous studies are selected for comparative experiments with the proposed method.
In experiments, the values of AP, precision, recall, and mAP evaluation metrics are calculated and compared when training on multivariate datasets of road traffic. As shown in Table 3, the recognition accuracy of multivariate road traffic under different network models is counted. Among them, the increased mAP value is calculated by comparing each network with the proposed method.
2. Ablation Experiment
In order to verify the effectiveness of the algorithm, ablation experiments are carried out on multi-element road traffic datasets, and the experimental results after fusion of K-means++, SPPF and ASFF are compared. Calculate and compare AP, precision, recall and mAP values. The results of the ablation test are shown in Table 5.

Experimental results show that the above ablation experiments can achieve good zebra crossing detection results without detection errors or missed detections. However, the above-mentioned ablation experiments all missed detection when detecting street parking spaces, and the number of missed detection street parking spaces was between 3 and 11. From the overall results, although the average detection accuracy of the YOLOv 5 + SPPF method is the highest, the number of missed detection spots is the most serious, which is 11. Compared with the serious missed detection in the ablation experiment, this method only missed 3 times, which is the method with the least number of missed detections in the ablation experiment. The detection accuracy rate of this method is 93.5%, and the difference between the two is only 0.28 for occluded roadside parking spaces, but the missed detection rate is greatly reduced. Experiments show that this method maintains the detection accuracy while ensuring the correctness of detection, especially in the detection of occluded small targets and parallel dense small targets.
5. Experimental conclusion
Aiming at the problems of extracting traffic element information from UAV remote sensing image with less data, low degree of automation but high requirements, small element scale, and easy to be disturbed by the environment, a method of extracting traffic element information from UAV remote sensing image based on ASFF-YOLOv5 is proposed. algorithm. The algorithm adopts the adaptive spatial feature fusion method based on the receptive field module, makes full use of different scale information, improves the invariance of feature scale, and improves the detection effect of small objects. When detecting multiple road traffic elements, the mAP of the proposed method reaches 93.1%, i.e. 19. It is 2% higher than the original YOLOv5 network. Comparative experiments and ablation experiments show that this method can solve the problem of false detection and missed detection of multi-element road traffic, improve the detection accuracy of small and dense objects in multi-element roads, and provide a new solution for the construction of basic geographic traffic information database. plan.
Note: The original text of the paper is from ASFF-YOLOv5: Multielement Detection Method for Road Traffic in UAV Images Based on Multiscale Feature Fusion This article is only for academic sharing. If there is any infringement, please contact the background to delete the article.
Interpretation of the series of articles, I have reproduced the innovative code, friends in need are welcome to pay attention to private message me to get ❤ .