DFS algorithm
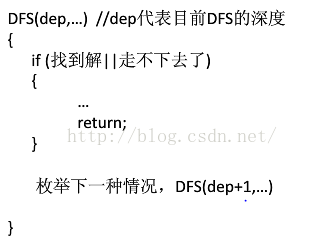

Thought: keep going deep, until you find a solution or you can't go any further
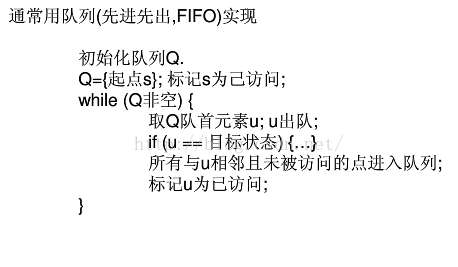
BFS algorithm
DFS: Use the stack to save undetected nodes. The nodes are accessed in depth-first order and pushed into the stack in turn, and popped out of the stack in reverse order for new detection.
BFS: Use a queue to store undetected nodes. Nodes are visited and enqueued in breadth-first order.
frame:
BFS
#include<cstdio>
#include<cstring>
#include<queue>
#include<algorithm>
using namespace std;
const int maxn = 100;
bool vst[maxn][maxn]; // access token
int dir[4][2] = {0,1,0,-1,1,0,-1,0}; // direction vector
struct State { // State data structure in BFS queue
int x, y; // coordinate position
int Step_Counter; // search step counter
};
State a[maxn];
bool CheckState(State s) { // constraint check
if(!vst[sx][sy] && ...) // conditions are met
return 1;
else // constraint violation
return 0;
}
void bfs(State st) {
queue <State> q; // BFS queue
State now, next; // define 2 states, current and next
st.Step_Counter = 0; // the counter is cleared
q.push(st); // enqueue
vst[st.x][st.y] = 1; // access token
while(!q.empty()) {
now = q.front(); // take the first element of the queue for expansion
if(now == G) { // The target state appears, this time is the minimum value of Step_Counter, you can exit
...... // do related processing
return;
}
for(int i = 0; i < 4; i++) {
next.x = now.x + dir[i][0]; // Generate the next state according to the rules
next.y = now.y + dir[i][1];
next.Step_Counter = now.Step_Counter+1; // increment the counter by 1
if(CheckState(next)) { // enqueue if the state meets the constraints
q.push(next);
vst[next.x][next.y] = 1; //Access flag
}
}
q.pop(); // The first element of the team is dequeued
}
return;
}
int main() {
......
return 0;
}
DFS:
/*
The DFS framework takes the 2D coordinate range as an example to reflect the realization idea of the DFS algorithm.
*/
#include<cstdio>
#include<cstring>
#include<cstdlib>
using namespace std;
const int maxn=100;
bool vst[maxn][maxn]; // access token
int map[maxn][maxn]; // coordinate range
int dir[4][2]= {0,1,0,-1,1,0,-1,0}; // direction vector, four directions around (x,y)
bool CheckEdge(int x,int y) { // Judgment of boundary conditions and constraints
if(!vst[x][y] && ...) // conditions are met
return 1;
else // conflicts with constraints
return 0;
}
void dfs(int x,int y) {
vst[x][y]=1; // mark the node as visited
if(map[x][y]==G) { // The target state G appears
...... // do the corresponding processing
return;
}
for(int i=0; i<4; i++) {
if(CheckEdge(x+dir[i][0],y+dir[i][1])) // Generate the next node according to the rules
dfs (x + dir [i] [0], y + dir [i] [1]);
}
return; // no lower search node, backtracking
}
int main() {
......
return 0;
}