/*!
Kalman filter.
The class implements standard Kalman filter \url{http://en.wikipedia.org/wiki/Kalman_filter}.
However, you can modify KalmanFilter::transitionMatrix, KalmanFilter::controlMatrix and
KalmanFilter::measurementMatrix to get the extended Kalman filter functionality.
*/
class CV_EXPORTS_W KalmanFilter
{
public:
//! the default constructor
CV_WRAP KalmanFilter();
//! the full constructor taking the dimensionality of the state, of the measurement and of the control vector
CV_WRAP KalmanFilter(int dynamParams, int measureParams, int controlParams=0, int type=CV_32F);
//! re-initializes Kalman filter. The previous content is destroyed.
void init(int dynamParams, int measureParams, int controlParams=0, int type=CV_32F);
//! computes predicted state
CV_WRAP const Mat& predict(const Mat& control=Mat());
//! updates the predicted state from the measurement
CV_WRAP const Mat& correct(const Mat& measurement);
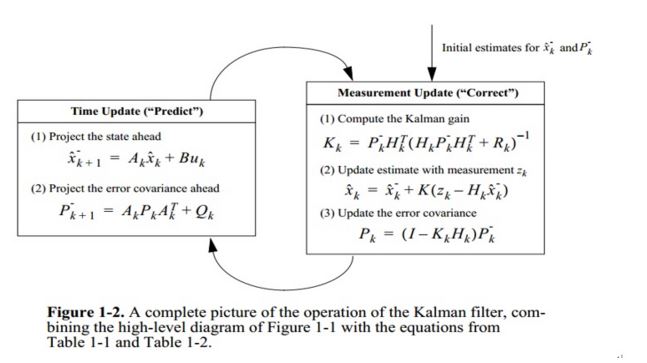
Mat statePre; //!< predicted state (x'(k)): x(k)=A*x(k-1)+B*u(k)
Mat statePost; //!< corrected state (x(k)): x(k)=x'(k)+K(k)*(z(k)-H*x'(k))
Mat transitionMatrix; //!< state transition matrix (A)
Mat controlMatrix; //!< control matrix (B) (not used if there is no control)
Mat measurementMatrix; //!< measurement matrix (H)
Mat processNoiseCov; //!< process noise covariance matrix (Q)
Mat measurementNoiseCov;//!< measurement noise covariance matrix (R)
Mat errorCovPre; //!< priori error estimate covariance matrix (P'(k)): P'(k)=A*P(k-1)*At + Q)*/
Mat gain; //!< Kalman gain matrix (K(k)): K(k)=P'(k)*Ht*inv(H*P'(k)*Ht+R)
Mat errorCovPost; //!< posteriori error estimate covariance matrix (P(k)): P(k)=(I-K(k)*H)*P'(k)
// temporary matrices
Mat temp1;
Mat temp2;
Mat temp3;
Mat temp4;
Mat temp5;
};
namespace cv
{
KalmanFilter :: KalmanFilter () {}
KalmanFilter::KalmanFilter(int dynamParams, int measureParams, int controlParams, int type)
{
/** full constructor
dynamParams: the dimension of the state vector
measureParams: the dimension of the observation matrix
controlParams: the dimension of the controller
type: matrix data type: default CV_32F
*/
init(dynamParams, measureParams, controlParams, type);
}
// initialize the filter
void KalmanFilter::init(int DP, int MP, int CP, int type)
{
CV_Assert( DP > 0 && MP > 0 );
CV_Assert( type == CV_32F || type == CV_64F );
CP = std::max(CP, 0);
statePre = Mat::zeros(DP, 1, type); // A predicted value of the state, (a priori estimate), DPx1 dimension
statePost = Mat::zeros(DP, 1, type); // updated state estimate, (posterior estimate)
transitionMatrix = Mat::eye(DP, DP, type); // state transition matrix (A), DPxDP
processNoiseCov = Mat::eye(DP, DP, type); // covariance matrix of process noise (Q)
measurementMatrix = Mat::zeros(MP, DP, type); // measurement matrix (H)
measurementNoiseCov = Mat::eye(MP, MP, type); // Covariance matrix of observation noise (R)
errorCovPre = Mat::zeros(DP, DP, type); // covariance matrix P'(k) of the error of the prior estimate
errorCovPost = Mat::zeros(DP, DP, type); // covariance matrix P(k) of the error of the posterior estimate
gain = Mat::zeros(DP, MP, type); // Kalman gain matrix(K(k))
if( CP > 0 )
controlMatrix = Mat::zeros(DP, CP, type); // control matrix (B)
else
controlMatrix.release();
temp1.create(DP, DP, type);
temp2.create(MP, DP, type);
temp3.create(MP, MP, type);
temp4.create(MP, DP, type);
temp5.create(MP, 1, type);
}
// Calculate the state predicted value, giving a priori estimate of the state
const Mat& KalmanFilter::predict(const Mat& control)
{
// update the state: x'(k) = A*x(k)
statePre = transitionMatrix*statePost;
if( control.data )
// x'(k) = x'(k) + B*u(k)
statePre += controlMatrix*control;
// update error covariance matrices: temp1 = A*P(k)
// Step 1: Pass the covariance matrix of the posterior error at the previous moment to the current moment through the state transition matrix
temp1 = transitionMatrix*errorCovPost;
// P'(k) = temp1*At + Q
// Step 2: Add the current process noise P'(k) = temp1*At + Q
gemm (temp1, transitionMatrix, 1, processNoiseCov, 1, errorCovPre, GEMM_2_T);
// handle the case when there will be measurement before the next predict.
statePre.copyTo(statePost);
errorCovPre.copyTo(errorCovPost);
return statePre;
}
// Update the one-step predicted value of the state based on the observation data and the observation error, and give the posterior estimate of the state
const Mat& KalmanFilter::correct(const Mat& measurement)
{
// temp2 = H*P'(k)
temp2 = measurementMatrix * errorCovPre;
// temp3 = temp2*Ht + R
gemm (temp2, measurementMatrix, 1, measurementNoiseCov, 1, temp3, GEMM_2_T);
// temp4 = inv(temp3)*temp2 = Kt(k)
solve(temp3, temp2, temp4, DECOMP_SVD);
// K(k)
gain = temp4.t();
// temp5 = z (k) - H * x '(k)
temp5 = measurement - measurementMatrix*statePre;
// x(k) = x'(k) + K(k)*temp5
statePost = statePre + gain*temp5;
// P(k) = P'(k) - K(k)*temp2
errorCovPost = errorCovPre - gain*temp2;
return statePost;
}
}