Reference: https://blog.csdn.net/guyuealian/article/details/80570120
Reference: https://blog.csdn.net/qq_29462849/article/details/85262609
1. Opencv3.4.4 version; opencv_contribut3.4.4 additional library version
git download or axel download; refer to the specific download method (opencv compilation of TPU)
Link: https://pan.baidu.com/s/1Lv8ekKtF8S_K8bjuQHk6CQ Password: rq95
2. Compile command of python3: (For subsequent commands, refer to the opencv compile command of TPU)
cmake -D BUILD_opencv_python3=YES -D BUILD_opencv_python2=NO -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D BUILD_EXAMPLES=ON -D WITH_LIBV4L=ON -D WITH_GTK=ON -D PYTHON3_EXECUTABLE=/usr/bin/python3 -D PYTHON_INCLUDE_DIR=/usr/include/python3.5 -D PYTHON_LIBARARY=/usr/lib/python3.5/config-3.5m-x86_64-linux-gnu/libpython3.5m.so -D PYTHON3_NUMPY_INCLUDE_DIRS=/usr/local/lib/python3.5/dist-packages/numpy/core/include -D ENABLE_PRECOMPILED_HEADERS=ON -D OPENCV_ENABLE_NONFREE=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-3.4.4/modules/ ..
The compilation command of python2:
sudo cmake -D BUILD_opencv_python3=NO -D BUILD_opencv_python2=YES -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D BUILD_EXAMPLES=ON -D WITH_LIBV4L=ON -D WITH_GTK=ON -D PYTHON2_EXECUTABLE=/usr/bin/python2 -D PYTHON_INCLUDE_DIR=/usr/include/python2.7 -D PYTHON_LIBARARY=/usr/lib/python2.7/config-x86_64-linux-gnu/libpython2.7m.so -D PYTHON2_NUMPY_INCLUDE_DIRS=/usr/local/lib/python2.7/dist-packages/numpy/core/include -D ENABLE_PRECOMPILED_HEADERS=ON -D OPENCV_ENABLE_NONFREE=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-3.4.4/modules/ -D CUDA_GENERATION=Kepler ..
The above is the successfully compiled opencv; (cv2 can be used for both python2 and python3, although python is not used)
project(object_tracker)
cmake_minimum_required(VERSION 2.8)
aux_source_directory(. SRC_LIST)
#添加OPENCV库
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV 3.4.4 REQUIRED)
#显示OpenCV_INCLUDE_DIRS的值
message(${OpenCV_INCLUDE_DIRS})
set(ignoreMe "${FOO}${BAZ}${BAR}")
add_executable(${PROJECT_NAME} ${SRC_LIST})
target_link_libraries(object_tracker ${OpenCV_LIBS})
Cmakefile.txt file
#include<opencv2/opencv.hpp>
#include<opencv2/dnn.hpp>
#include <iostream>
#include<map>
#include<string>
#include<time.h>
using namespace std;
using namespace cv;
const size_t inWidth = 320;
const size_t inHeight = 300;
const float WHRatio = inWidth / (float)inHeight;
const char* classNames[]= {"background", "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "background", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe", "background", "backpack",
"umbrella", "background", "background", "handbag", "tie", "suitcase", "frisbee","skis", "snowboard", "sports ball", "kite", "baseball bat","baseball glove", "skateboard", "surfboard", "tennis racket",
"bottle", "background", "wine glass", "cup", "fork", "knife", "spoon","bowl", "banana", "apple", "sandwich", "orange","broccoli", "carrot", "hot dog", "pizza", "donut",
"cake", "chair", "couch", "potted plant", "bed", "background", "dining table", "background", "background", "toilet", "background","tv", "laptop", "mouse", "remote", "keyboard",
"cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "background","book", "clock", "vase", "scissors","teddy bear", "hair drier", "toothbrush"};
int main()
{
clock_t start, finish;
double totaltime;
Mat frame;
VideoCapture capture;
capture.open("/home/ubuntu/Flying_pets/software/object_tracker/a.mp4");
String weights = "/home/ubuntu/Flying_pets/software/object_tracker/ssd_mobilenet_v2_coco_2018_03_29.pb";
String prototxt = "/home/ubuntu/Flying_pets/software/object_tracker/ssd_mobilenet_v2_coco_2018_03_29.pbtxt";
dnn::Net net = cv::dnn::readNetFromTensorflow(weights, prototxt);
double total_fps = capture.get(CV_CAP_PROP_FRAME_COUNT);
while (capture.read(frame))
{
start = clock();
Size frame_size = frame.size();
Size cropSize;
if (frame_size.width / (float)frame_size.height > WHRatio)
{
cropSize = Size(static_cast<int>(frame_size.height * WHRatio),
frame_size.height);
}
else
{
cropSize = Size(frame_size.width,
static_cast<int>(frame_size.width / WHRatio));
}
Rect crop(Point((frame_size.width - cropSize.width) / 2,
(frame_size.height - cropSize.height) / 2),
cropSize);
cv::Mat blob = cv::dnn::blobFromImage(frame, 1 , Size(300, 300));
//cout << "blob size: " << blob.size << endl;
net.setInput(blob);
Mat output = net.forward();
//cout << "output size: " << output.size << endl;
Mat detectionMat(output.size[2], output.size[3], CV_32F, output.ptr<float>());
frame = frame(crop);
float confidenceThreshold = 0.50;
for (int i = 0; i < detectionMat.rows; i++)
{
float confidence = detectionMat.at<float>(i, 2);
if (confidence > confidenceThreshold)
{
size_t objectClass = (size_t)(detectionMat.at<float>(i, 1));
int xLeftBottom = static_cast<int>(detectionMat.at<float>(i, 3) * frame.cols);
int yLeftBottom = static_cast<int>(detectionMat.at<float>(i, 4) * frame.rows);
int xRightTop = static_cast<int>(detectionMat.at<float>(i, 5) * frame.cols);
int yRightTop = static_cast<int>(detectionMat.at<float>(i, 6) * frame.rows);
ostringstream ss;
ss << confidence;
String conf(ss.str());
Rect object((int)xLeftBottom, (int)yLeftBottom,
(int)(xRightTop - xLeftBottom),
(int)(yRightTop - yLeftBottom));
rectangle(frame, object, Scalar(0, 255, 0), 2);
//cout << "objectClass:" << objectClass << endl;
String label = String(classNames[objectClass]) + ": " + conf;
//cout << "label"<<label << endl;
int baseLine = 0;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
rectangle(frame, Rect(Point(xLeftBottom, yLeftBottom - labelSize.height),
Size(labelSize.width, labelSize.height + baseLine)),
Scalar(0, 255, 0), CV_FILLED);
putText(frame, label, Point(xLeftBottom, yLeftBottom),FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 0));
}
}
finish = clock();
totaltime = finish - start;
cout << "Frames per second : " << totaltime/total_fps << endl;
namedWindow("result", 0);
imshow("result", frame);
char c = waitKey(5);
if (c == 27)
{ // ESC退出
break;
}
}
capture.release();
waitKey(0);
return 0;
}main.cpp main file
opencv calls tensorflow's model for target recognition;
Link: https://pan.baidu.com/s/1gk6rBeTEZG_oJ6wV6p92FQ Password: dgfh
Only two models are supported for the time being, v3 strives to try them out early;
Model generation process:
1 Download the model file: https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/detection_model_zoo.md
2 Execute the script file in opencv3.4 + the configuration file of the tensorflow community:
(Frozen_inference_graph.pb was renamed ssd_mobilenet_v2_coco_2018_03_29.pb)
ubuntu@ubuntu:~/Downloads/opencv-3.4.4/samples/dnn$ python3 tf_text_graph_ssd.py --input ../../../ssd_mobilenet_v2_coco_2018_03_29/ssd_mobilenet_v2_coco_2018_03_29.pb --config ../../../ssd_mobilenet_v2_coco_2018_03_29/pipeline.config --output ../../../ssd_mobilenet_v2_coco_2018_03_29/ssd_mobilenet_v2_coco_2018_03_29.pbtxt
Number of classes: 90
Number of layers: 6
Scale: [0.200000-0.950000]
Aspect ratios: [1.0, 2.0, 0.5, 3.0, 0.333299994469]
Reduce boxes in the lowest layer: True
box predictor: convolutional
Input image size: 300x300
ubuntu@ubuntu:~/Downloads/opencv-3.4.4/samples/dnn$
Then write these two sentences in the code:
String weights = "/home/ubuntu/Flying_pets/software/object_tracker/ssd_mobilenet_v2_coco_2018_03_29.pb";
String prototxt = "/home/ubuntu/Flying_pets/software/object_tracker/ssd_mobilenet_v2_coco_2018_03_29.pbtxt";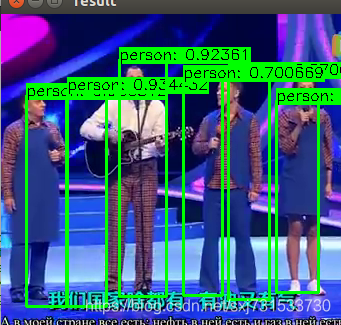
The video recognition effect is okay, it can run in real time
————————————————————————————————————
Trying to convert the ssd_mobilenet_v3_small_coco model
A related blog proposes that three types of nodes cannot exist in the transition from pb model to dnn model:
# if pb include div,sub,argmax ,the opencv can't using pb models
import tensorflow as tf
import os
import re
out_path='./'
model_dir = './'
model_name = 'ssd_mobilenet_v3_small_coco_2019_08_14.pb'
def create_graph():
with tf.gfile.FastGFile(os.path.join(out_path+ model_name), 'rb') as f:
graph_def = tf.GraphDef()
graph_def.ParseFromString(f.read())
tf.import_graph_def(graph_def, name='')
create_graph()
tensor_name_list = [tensor.name for tensor in tf.get_default_graph().as_graph_def().node]
for tensor_name in tensor_name_list:
if re.search( r'div', tensor_name, re.M|re.I):
print (tensor_name)
elif re.search( r'sub', tensor_name, re.M|re.I):
print (tensor_name)
elif re.search( r'argmax', tensor_name, re.M|re.I):
print (tensor_name)The check.py test passed, avoiding a questioning pit raised by a blogger;
Although the model generated pbtxt was successfully generated, it still cannot be executed, but there are still problems. It is under investigation and has submitted a question to opencv~I am researching~~~