https://mp.weixin.qq.com/s/akZcJFJInI0KrCPQu9Hlxw
By 超神经
对于叠叠乐( Jenga )这种积木游戏,想必很多人都深有体会,因为稍有不慎,辛辛苦苦堆起来的积木塔就毁于一旦。这样的事情,交给 AI 和机器人来做,会怎么样呢?
Es scheint, dass Teams für künstliche Intelligenz immer gerne Durchbrüche durch Spiele finden. Der vom MIT-Team entwickelte Roboterarm begann auch mit Spielen in der dreidimensionalen Welt.
In Jenga werden die Blöcke im Allgemeinen zuerst mit drei Blöcken zu einer Schicht gestapelt, und die Blöcke werden versetzt, um einen Turm zu bilden, und dann werden die Blöcke von unten extrahiert und oben auf dem Turm platziert, um einen höheren Blockturm zu erzeugen.
Das Jenga-Spiel ist ein Test für Geduld, Gleichgewicht, Kraft usw. Für viele Menschen (insbesondere Studenten, die zum Händeschütteln neigen) ist dieses Spiel zu schwierig. Der vom MIT entwickelte Roboter überwindet diese Aufgabe leicht durch Erkennung, Algorithmen, Push-Pull, Ausrichtung und andere Operationen.
Wo ist es heilig?
Menschen sagen immer, dass sie "Hand schütteln", daher besteht die Forschung an Roboterarmen darin, einige raffinierte oder risikoreiche Operationen durchzuführen. Einer der Mitglieder des Projektteams, Alberto Rodriguez, Assistenzprofessor am Institut für Maschinenbau am MIT, wies darauf hin, dass der Schlüssel zu diesem Roboter darin besteht, dass er Vision und Berührung perfekt kombiniert.
Diese Technologie ist nicht nur im Science Robotics Journal, sondern
auch in den heutigen Mittagsnachrichten von CCTV enthalten.
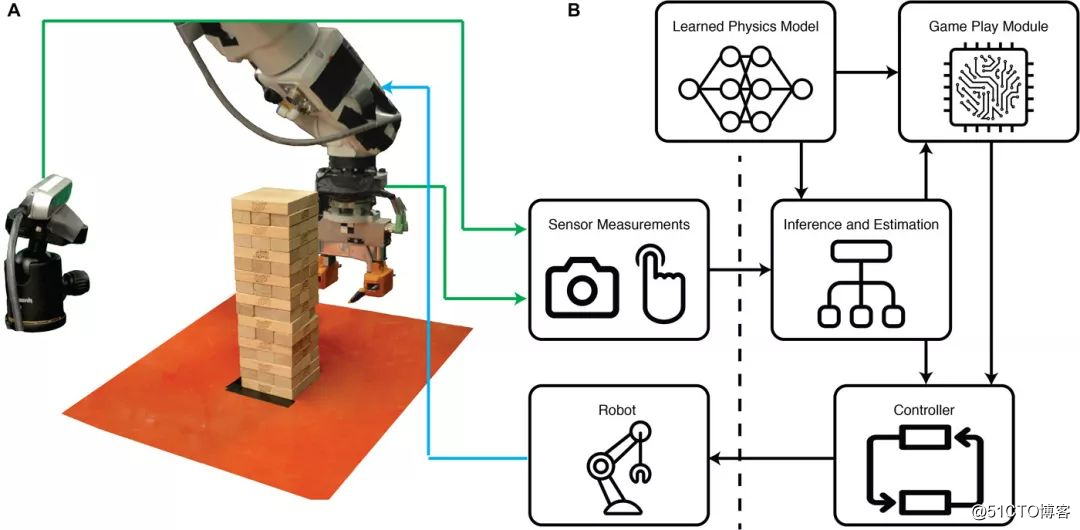
Aber vom Aussehen her ähnelt dieser Roboter einigen gängigen Applikationsmaschinen, wie ein gewöhnlicher mechanischer Arm, ist jedoch mit einem weichen Zahngreifer, einem Kraftmessarmband und einer externen Kamera ausgestattet, was recht ist Yu gab ihm Hände, Berührung und Augen.
Bei der Arbeit wird der Greifer zum Bedienen der Bausteine verwendet und kann auch den Tastsinn zurückmelden, das Sensorarmband wird zum Steuern der Betätigungskraft der Bausteine verwendet, die Kamera wird zum Sammeln visueller Bilder verwendet.
Neben diesen Formen, die es dem Roboter ermöglichen, die Bausteine flexibel zu bewegen, ist es am wichtigsten, eine "Seele" zu haben, die sich von den vorherigen Roboterforschern unterscheidet. Sie verwenden neue Algorithmen, um sie bei dieser Aufgabe besser zu machen.
Laut MIT-Forschern verwendet dieser Roboter keine traditionellen KI-Lernmethoden, sondern verwendet kreativ hierarchische Modelldynamiken, um ein Clustering-Lernmodell zu erstellen.
Dies hat den Vorteil, dass es nicht mehr von einer großen Datenmenge abhängt, sondern eine Echtzeitanalyse basierend auf den Rückkopplungsdaten durchführen kann, während Kontakt aufgenommen und erkannt wird, während der Plan zum Verschieben des nächsten Blocks vorhergesagt wird.
Wie spielt es Jenga?
Tatsächlich kann der Roboter das scheinbar komplexe Jenga-Spiel bewältigen, und Cluster-Lernen ist der Schlüssel.
Die traditionelle Methode zur Lösung dieses Spiels besteht darin, alle Beziehungen zwischen den Bausteinen, Robotern und Bausteintürmen zu sammeln, um den besten Weg zu berechnen. Dies wird jedoch offensichtlich eine große Datenmenge mit sich bringen, und die Berechnungsschwierigkeiten werden erheblich erhöht.
In dieser Studie wurde der Roboter ausgewählt, um die Art und Weise zu imitieren, wie Menschen Spiele spielen. Der erste besteht darin, zu versuchen, die Daten zu kennzeichnen und zu gruppieren. Beurteilen Sie dann die Machbarkeit der neuen Operation, indem Sie sie mit den markierten Daten vergleichen.
Lassen Sie den Roboter zunächst einem Bausteinturm zugewandt sein, wählen Sie die Bausteine nach dem Zufallsprinzip aus und drücken Sie sie mit einer relativ geringen Kraft heraus. Bei jedem Vorgang des Herausdrückens und Zeichnens der Bausteine zeichnet der Computer die entsprechenden visuellen Daten und Kraftdaten sowie das Operationsergebnis auf Markiere es.
In dieser Studie wurden ungefähr 300 Versuche unternommen, und es wurden genügend Daten gesammelt, und dann wurden die Daten verarbeitet. Hier wird Clustering verwendet, und Vorgänge mit ähnlichen Daten und Ergebnissen werden in einer Gruppe zusammengefasst, um das spezifische Bausteinverhalten darzustellen.
Verschiedene Gruppen repräsentieren unterschiedliche Grade der Bedienbarkeit, was auch der Standard für die Messung jeder Operation ist. Beispielsweise repräsentiert ein Datensatz einen Versuch des Roboters auf einem Baustein, der schwer zu bewegen ist, während ein anderer Datensatz einen Versuch auf einem Baustein darstellt, der leichter zu bewegen ist.
Für jeden unterschiedlichen Datensatz wird entsprechend ein einfaches Modell angegeben. Durch die Kombination dieser Modelle entspricht der Roboter dem Lernen in Echtzeit.

Schließlich kann die eigentliche Übung ausgeführt werden. Wenn der Roboterarm die Bausteine herausdrückt, verwendet er die Kamera und das Armband, um visuelle und taktile Informationen zu empfangen, und vergleicht dann das empfangene Feedback mit den vorherigen Daten. Wenn die Daten einem guten Ergebnis entsprechen, Führen Sie diesen Vorgang einfach aus. Wenn die Gefahr eines Zusammenbruchs besteht, geben Sie diesen Vorgang auf.
Nicht nur Jenga
MIT-Forscher wiesen darauf hin, dass Roboter zwar in der Lage waren, dieses Spiel in ihrer Forschung zu spielen, dass jedoch einige Verbesserungen erforderlich sind, wenn sie im Wettbewerb mit menschlichen Meistern eingesetzt werden. Denn in dieser Forschung konzentriert sich der KI-Roboter auf die Lösung des Problems der physischen Interaktion, wodurch das Problem gelöst wird, ob dieser Baustein extrahiert und darauf platziert werden kann. Das Jenga-Spiel erfordert jedoch noch einige Strategien, bei denen die damit verbundenen Schritte berücksichtigt und analysiert werden.
Aber das MIT-Forschungsteam hatte diese Idee offensichtlich nicht. Vielleicht hat es für sie nicht viel Wert, einen Meister von Jenga zu schaffen. Laut dem Teamforscher Rodríguez wird die Technologie in tatsächlichen Arbeitsumgebungen berücksichtigt, beispielsweise bei der Herstellung von Robotern am Fließband.
Wie auch immer, wir sagen oft, dass unsere Hände zittern. Dann lassen Sie professionelle "Leute" diese professionellen Dinge tun. Warten wir, bis wir vom Neujahrsessen überwältigt werden.
Super nervöse Enzyklopädie
Clustering
Clustering ist eine maschinelle Lerntechnik zum Gruppieren von Daten. Im Allgemeinen werden Datenobjekte in mehrere Klassen oder Cluster (Cluster) gruppiert, sodass Objekte im selben Cluster einen höheren Grad an Ähnlichkeit aufweisen, während Objekte in verschiedenen Clustern sehr unterschiedlich sind.
Für einen bestimmten Satz von Datenpunkten kann ein Clustering-Algorithmus verwendet werden, um jeden Datenpunkt in eine bestimmte Gruppe zu klassifizieren. Theoretisch sollten Datenpunkte, die zur gleichen Gruppe gehören, ähnliche Attribute und / oder Eigenschaften aufweisen. Clustering ist eine unbeaufsichtigte Lernmethode.
