1、内容简介
略
298-可以交流、咨询、答疑,公式编辑不好用,需要word的可以私聊
2、内容说明
基于加速度的路面平整度指标
功率谱密度估计理论频谱密度函数是频域中描述信号特征的方法之一,它反映了信号所含分量的幅度和相位随频率的分布情况。此外还可以用能量谱或功率谱来描述信号。能量谱和功率谱是表示信号的能量或功率在频域中的变化情况,它对研究信号的能量(或功率)的分布,决定信号所占有的频带等问题都有重要的作用。
由于随机过程的持续时间是无限的,所以其总能量也是无限的,所以这类时间函数也就不能用频谱表示。这时,往往用功率谱来描述它的频域特性。信号的功率定义为:
(3-1)
如果信号的功率是有限值,则称此信号为功率的有限信号,简称功率信号。一切能量有限的信号平均功率为零,故一般所指的功率有限信号的能量必定是无限大。
对于随机过程,截取时间长度为的样本函数,称为的阶段函数,其实际记录为。由于截断函数是有限长的,存在傅里叶变换,因而有
(3-2)
(3-3)
即为的频谱函数。
将式(3-3)代入到式(3-1),并考虑到讨论的是实随机过程,是实函数,可得
(3-4)
式(3-4)的被积函数即被称为样本函数的功率谱密度函数,记为,因此,随机过程的平均功率可以由它的功率谱密度在整个频率域上积分得到,即
(3-5)
若随机过程是各态历经过程,则有
(3-6)
此时,样本函数的功率谱密度和随机过程的功率谱密度以概率1相等。
路面不平度功率谱密度大量测试结果证明,路面的功率谱密度函数具有负指数特性。所以标准(GB 7031-86和ISO/DIS 8608)中规定路面的功率谱密度表达式为:
(3-7)
式中:—— 功率谱密度,m3;
—— 参考空间频率,;
—— 空间频率,m-1;
—— 路面不平度的系数,m3,是路面的谱密度在处的值;
—— 频率指数,用以表示路面谱密度的频率结构,在双对数坐标里表现为谱密度的函数斜率。
根据标准所规定的内容,式(3-7)图形采用双对数坐标的形式来表示。采用对数的坐标来扩大表示的动态范围,与此同时还可以对高频端包含的低功率部分在图形上进行放大。
标准通过路面的功率谱密度量度将路面的不平度分为8级(图3-2)。分级频率指数。
图3-2 路面不平度分级图
是路面在垂直位移空间的功率谱密度。将它分别一阶和二阶求导,可以得到路面垂直位移的空间速度功率谱以及加速度功率谱,用它们来补充对路面平整度的统计特性,公式的下标d 、a和v分别是代表位移、加速度和速度。它们与的关系如下:
(3-8)
(3-9)
四分之一车辆模型根据文献,当双轴汽车四个自由度的振动模型悬挂质量分配系数接近于1时,前后悬架系统的垂直振动几乎是独立的[9],故而可以简化为如图3-2所示的两个自由度振动系统。该系统除具有车身部分的动态特性外,还能反应车轮部分在10~15Hz范围产生高频共振时的动态特性,更接近汽车悬挂系统的实际情况。虽然该系统经过高度简化,但是该系统在不使分析复杂化的前提下能够对车辆的动态响应提供较好的观察。如图3-3所示,此系统包括由主悬挂系统所支撑的悬挂质量,它再与车轴的非悬挂质量,两质量间以线刚度的弹簧和线性阻尼的减震器相连接;非悬挂质量通过具有线性弹簧的轮胎与地面相接触。
图3-3 四分之一车辆振动模拟系统
当车辆以一定的速度沿路表纵剖面轨迹行驶时,在路面不平度的激励作用下,系统产生振动。悬挂质量与非悬挂质量垂直位移坐标为、,坐标原点选在各自的平衡位置,考虑各自的自由体受力图,可以分别求得悬挂质量和非悬挂质量的微分方程式如下:
(3-10)
(3-11)
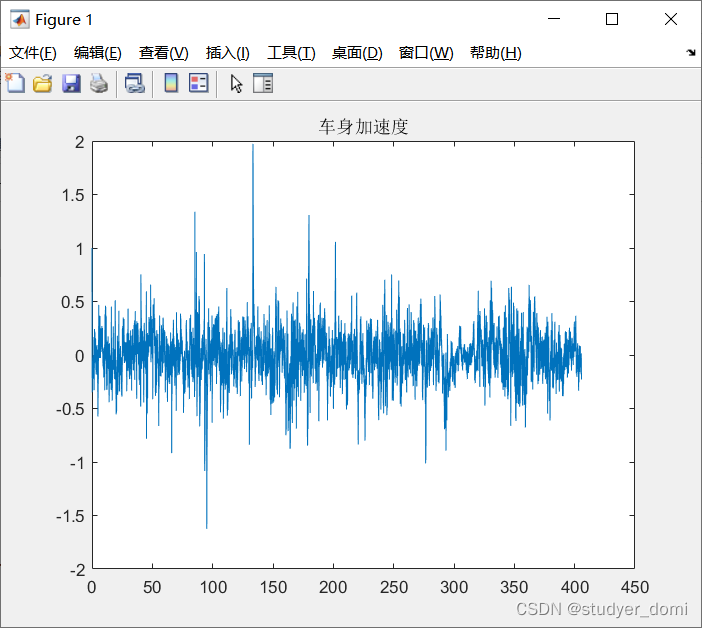
而由手机测得的垂直振动加速度:
(3-12)
对式(3-10)~(3-11)方程两边进行傅里叶变换,代入各复振幅:
可得
(3-13)
令:,,,,,代入是(3-13)消去,则得到系统悬挂质量加速度输出对路面位移输入的传递函数的模为:
(3-14)
基于车身加速度的路面功率谱密度由3.2.2节知,公路部门对于路面功率谱密度函数是采用空间频率来描述的,是波长的倒数,单位为。当车辆以一定车速通过一段道路时,在车速的作用下把空间域的路面平整度变换成时间域的激励,其关系为。式中,表示时间激励频率,单位为,表示车速,单位为。而时间频率带宽与空间频率带宽的关系为:。
由3.2.1节可知,功率谱密度的物理意义是单位频带内的“能量”(均方值),所以空间频率下的功率谱密度可以表示为:
(3-15)
式中:—— 路面谱在频带内所包含的“能量”。
在一定车速下,时间频率带宽与空间频率带宽成正比,两者包含的路面垂直位移谐量成分相同,所以换算为时间频率的功率谱密度可表示为:
(3-16)
将及式(3-15)代入式(3-16),即可得到空间功率谱密度与时间功率谱密度的换算式:
(3-17)
大量测量表明,路面平整度是符合震源随机场基本假设的零均值局部均匀各态历经的高斯随机场,转换到时间域中则为平稳随机过程,根据线性时不变系统理论,系统响应也为平稳随机过程[16],故系统悬挂质量加速度输出与路面位移输入的自功率谱密度函数与传递函数之间存在如下关系:
(3-18)
又角频率与自然频率关系式为,而传递函数已在3.2.3节中求得,如式(3-14)所示,故而基于车身加速度值的路面功率谱密度函数为:
(3-19)
加速度功率谱密度与国际平整度之间的关系
对于平稳随机过程,自相关函数和功率谱密度构成傅里叶变换对[52],对于路面平整度函数有
(3-20)
式中,为路面平整度垂直位移自功率谱密度函数,为路面平整度垂直位移自相关函数。
又
(3-21)
当时,由式(3-20)得:
(3-22)
由式(3-21)得:
(3-23)
所以当时,即路面平整度均方值等于其自功率谱密度在全频域上的积分。此处为双边谱密度,而在实际工程中,常把负频率范围内谱密度折算得到正频率范围内,即
(3-24)
所以
(3-25)
又均方值与标准差存在如下关系:,通常将近似为零,得到路面平整度标准差与加速度功率谱密度之间的关系为:
(3-26)
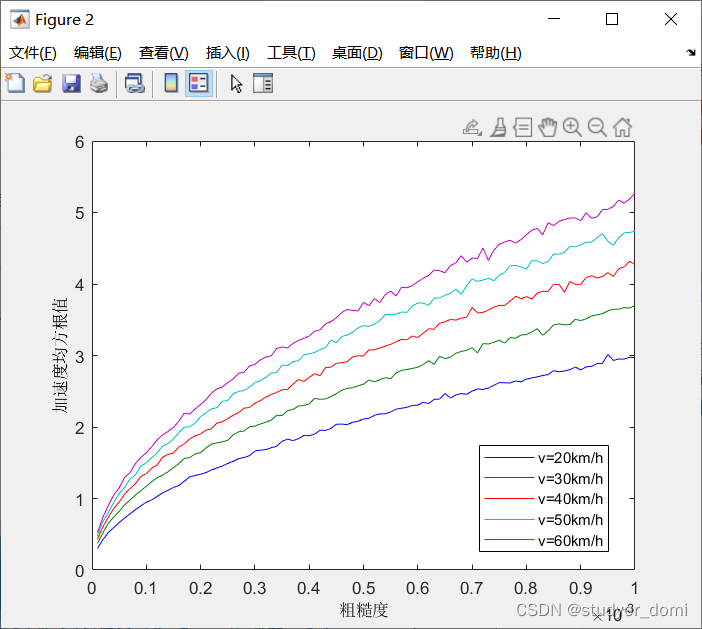
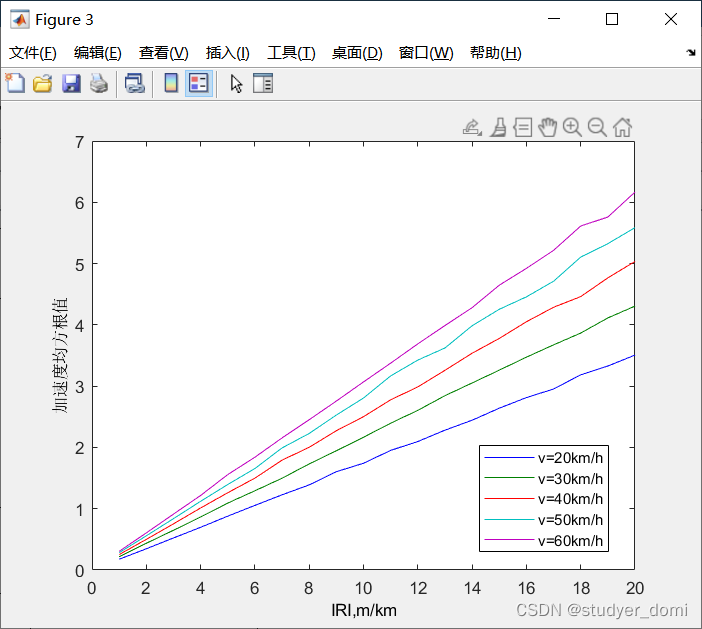
由交通部公路科学研究所对国际平整度指数和平整度标准差之间的换算关系研究知[53],两者存在线性相关关系,即。
联系式(3-39),令,可知与也近似满足线性关系,故
(3-27)
式中:为拟合系数。
3、仿真分析
略
4、参考论文
基于汽车车身垂直加速度的典型道路路面谱识别研究