MATLAB和ADAMS联合仿真:轨迹规划控制和姿态反馈控制
D-H坐标分析法:分析四足机器人运动学正/逆问题,掌握足端相对于机身的位姿与关节旋转变量的关系
欧拉-拉格朗日法:推导单腿连杆系统的动力学方程,了解杆件受力与转动角度/角速度以及角加速度之间的关系
总思路

四足机器人运动学和动力学分析。利用连杆 D-H 坐标法对四足机器人的连杆系统做一个运动学的分析,把足端的位姿关系与机身坐标系关联起来,并且能够通过逆运算推算出连杆各个关节角的大小;介绍了欧拉-拉格朗日方程在典型连杆结构中动力学分析的方法,并且在复杂的四足机器人结构中,选用了一个简单的单腿双连杆结构进行动力学的分析,得出了关节力矩与转动角度、角速度、角加速度之间的关系。
四足机器人运动控制的研究。针对第三章中存在的问题,选用一种复合摆线来规划四足机器人的足端运动轨迹,并且利用 MATLAB 中的 Simmechanics 工具箱得以仿真实现;介绍了 ADAMS/MATLAB 的联合仿真方式,并且以联合仿真的方式实现了足端轨迹规划的四足机器人三角步态的设计,在此基础上还实现了轨迹跟踪 PID 控制和滚转角反馈控制,并取得了一定的控制效果
运动学与动力学分析
坐标系定义
定义世界坐标系W ,机身坐标系 B ,以及足端坐标系 E ,坐标系方向均符合右手法则。同时定义臀关节坐标系 1 ,髋关节坐标系 2 ,膝关节坐标系 3 ,足坐标系 e 以上三个坐标系坐标原点分别位于三个关节位置,Z轴方向为关节的旋转轴方向,X轴方向沿连杆方向,Y轴方向由右手法则确定。
Tips:运动学分析就是根据每个坐标系之间的变换矩阵可以说明彼此的关系,我们需要使用的逆运动学就是可以确定足坐标系e然后根据每相邻两个的变换逆矩阵反推出每个关节的角度

运动学分析
正向运动学问题:是通过四足机器人连杆参数与关节变量推导机身坐标系下的足端位置;
逆向运动学问题:是由足端位置推导得出各个关节变量
说明:
四足机器人的关节角度或者关节力矩常被作为关节变量参与运动学的分析,我们采用电机作为关节驱动装置,故以关节角度表示关节变量
D-H参数法
介绍:
首先在各个连杆上分别设置坐标系,
然后根据连杆的自身结构与前后关系构造四阶的齐次变换矩阵(D-H 矩阵),最后再由连杆坐标的不断传递计算系统任意坐标系之间的位置关系,得到四足机器人的运动学方程
D-H矩阵说明:
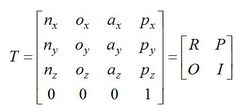
D-H 矩阵由旋转矩阵 R 与位置矩阵 P 构成,分别反映了相对坐标系对于参考坐标系的旋转与位置关系。其中,旋转矩阵 R 由矩阵 N、O、A 构成,分别表示相对坐标系的 x、y、z 三轴对于参考坐标系的方向余弦
D-H矩阵由4大部分构成,R-旋转矩阵,P-位置矩阵,O-透视矩阵,I-比例变换。
其中,n矩阵为相对坐标系x轴对于参考坐标系的方向余弦。o矩阵为相对坐标系y轴对于参考坐标系的方向余弦。a矩阵为相对坐标系z轴对于参考坐标系的方向余弦。P为相对坐标系对于参考坐标系的位置向量。O为全为0的矩阵,I在一般情况下为[1],在相对坐标系对参考坐标系除了旋转之外还有长度变化的时候I值不为1,其值为变化后的长度与变化前的基准长度的比值

求解D-H矩阵的方法:
①列出连杆参数表
②代入D-H矩阵一般表达式
说明:si = sinθi ;ci = cosθi (i是下标)

关于变换矩阵T、旋转矩阵R、位置矩阵 P 联系

运动学D-H参数
机器人中每个连杆均可用连杆长度(a)、连杆转角( α)、连杆偏距(d )和关节角(θ)这四个运动学参数来描述。
连杆偏距(d )和关节角(θ)描述连杆之间的关系
连杆长度(a)、连杆转角(α)描述本身特征
说明:
对于转动关节,仅θ是变量,其他三个参数都不变化
对于移动关节,仅d是变量,其他三个参数都不变化

步态研究
常见概念
支撑相:机器人腿与地面接触,为机器人提供支撑力的同时产生摩擦力驱动机器人行进的状态;
摆动相:机器人腿处于悬空摆动的状态;
步态周期 T:机器人每条腿全部完成一次支撑相和摆动相的时间;
占空比 β(占地系数):机器人每条腿的支撑相在步态周期中的比值;
步幅 S:机器人腿从刚开始进入支撑相到刚开始进入摆动相的时间内立足点所行进的距离

对角步态:
对角步态每条腿的占空比为 0.5,处于对角线位置的腿有着相同的相位,也就是同时处于支撑相或者摆动相,机器人运动的过程中至少有两条腿处于支撑状态,为了保证一定的稳定性,需要具有合适的速度,当处于一个小跑的状态时,能耗特性最好
三角步态:
三角步态的占空比为 0.75,每条腿先后有四分之一个周期的相位差,运动过程中至少有三条腿处于支撑状态,是一种慢速爬行且最具有稳定性的步态之一。左前腿(LF)——右后腿(RB)——右前腿(RF)——左后腿(LB)时,三角步态的稳定裕度最大,最稳定
骝蹄步态:
骝蹄步态是保持同侧两条腿一同支撑或者摆动,主要应用于一些特殊路面环境的行走,由于行走时受的倾斜力较大,需要保持较快的速度以及承载更大的扭矩;跳跃步态是一种类似猎豹急速奔跑的步态,前侧腿或者后侧腿处于同一种状态,前行速度很快,要求的机器人硬件性能也很高
机械结构分类
四足机器人的机械结构分为全膝式、全肘式、前肘后膝式(内膝肘式)以及前膝后肘式(外膝肘式)。本文所采用的关节结构为内膝肘式,有研究表明内膝肘式的机器人更加具有稳定
如何根据x/y/z轴反映实际运动情况
x轴:四足机器人前进方向
y轴:四足机器人竖直向上的方向,滚筒通道
z轴:偏航方向,由于没有臀关节,四足机器人会随着时间逐渐偏离原来的轨道,并且在运动的过程中伴随有一个振幅为 12.5mm 的左右偏航摆动
(关于偏航、滚筒概念参考博客https://blog.csdn.net/guyubit/article/details/52995676)
x轴质心位移曲线

X 轴反应了四足机器人的前进方向,在 5 秒的仿真时间内走了大约 1m 的路程,速度约等于 20cm/s,与上一小节中设计的速度基本一致
y轴质心位置曲线

Y 轴的曲线反应了四足机器人在滚转通道的运动情况,保持有一个振幅为 2mm 的上下滚转振动
z轴质心位置曲线

Z 轴的曲线反应了四足机器人在偏航通道的运动情况,由于没有设置臀关节变量,四足机器人会随着时间逐渐偏离原来的轨道,并且在运动的过程中伴随有一个振幅为 12.5mm 的左右偏航摆动
力矩曲线简要分析

图 3.13~3.15 的振荡曲线分别体现了力在 X、Y、Z 轴方向上对膝关节的力矩大小,图中的一些突变峰值曲线是由于运动过程中,当关节角度出现在首末位置上时,雅克比矩阵的模值大小趋于 0,这个状态称为雅克比奇异状态,受力会出现突变现象。除了这些突变的峰值外,在 Z 轴方向上受力的力矩大小明显要小于其他两个方向,这也是四足机器人主要是直线运动的原因
运动参数的确定


运动学和动力学分析
思路图:

运动控制
强大的环境适应能力,需足端的摆动轨迹在机器人运动中是有一定要求的,必须考虑以下因素
①足端轨迹的高宽比,它能够直接反应出运动曲线的特性,运动能力越强的机器人,
高宽比就越大,但是机器人的前进速度就越差
???②第二个因素是足端轨迹的弧长。如果曲线宽度是一个给定值,那么足端轨迹的曲线长度越
长,那么在摆动相的时间就越长,进一步牵扯到摆动腿的抬腿速度,从而影响四足机器人的前
行速度。如果曲线长度越短,对应的抬腿时间越短,四足机器人跨越障碍物的能力就越差。
③面对不同的路面时,需要选择不同的足端轨迹
驱动方式
四足机器人中常用的驱动方式主要有:气动驱动、液压驱动以及电机驱动
气动驱动:
是一种较为简单的驱动方式,利用气压来驱动关节运动。气压装置结构简单,功率较小,拥有较高的可靠性和性价比,但是由于空气的可压缩性,在承受负载的情况下很难精确控制气缸的位置。
液压驱动:
液压驱动的工作原理是通过油泵生成的工作油液压产生推力,来驱动机器人关节的运动,
具有输出功率大、平稳驱动并且不需要减速机构的特点。液压驱动能够产生较大的扭矩,一般
采用液压驱动的机器人都有较强的负载能力,但是液压系统也经常存在漏油和噪声大的问题,
维护起来比较麻烦,不适合用在小型机器人上
电机驱动:
电机驱动则是一种将电磁能转化为动能的驱动方式,电机将产生的力矩在减速机构的配合
下驱动负载做功。电机驱动是目前机器人应用最广泛的方式,具有控制简单,精度高,运动平
稳等特点(舵机PWM占空比改变实现舵机转动位置控制,输入电压改变舵机扭矩与速度控制)
四足机器人设计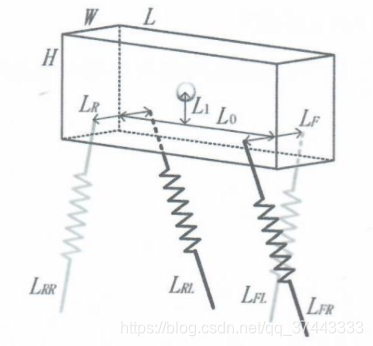
LF/LFR和LF/L0较小(即窄身体)灵活性好L1较小,重心低稳定性好,但是会限制腿侧摆的幅度,建议H/4<=L1<=H/2
选择高力矩密度电机、低阻抗传导、低转动惯量的腿
高力矩密度电机:
一般电机只有转速高才功率密度高,所以一般设计成高转速电机+高减速比减速器的结构
低阻抗传导:
腿部采用较低减速比的减速器或者不采用减速器,可以直接把输出轴受到力矩传递给输入轴的电机,实现输出轴的直接力矩控制
低转动惯量的腿:
保证腿的结构刚度,尽可能减少腿的质量,并把腿的质量几种到髋关节
几个常用结论
1、四足机器人腿越长越稳、机身质量越大越稳
2、迈步频率越快越稳