1. 学习目标:
| 目标 | OpenCV函数 |
| 均值滤波 | blur() |
| 高斯滤波 | GaussianBlur() |
| 中值 | medianBlur() |
| 双边 | bilateralFilter() |
2. OpenCV理论
平滑,也称为模糊。
平滑的原因有很多。 我们将重点关注平滑以减少噪声。
要执行平滑滤波操作,我们将对图像应用滤波器filter。 最常见的滤波器类型是线性的,其中输出像素的值, 输入像素值的加权和
:
为滤波器
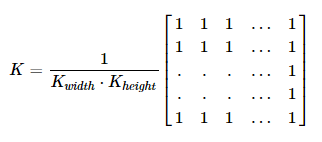
Normalized Box Filter(均值滤波)
这个过滤器是最简单的。 每个输出像素是其内核邻域的平均值(所有这些像素都具有相同的权重)
内核如下:
Gaussian Filter
最常用的滤波器(尽管不是最快的)。 通过将输入数组中的每个点与高斯核进行卷积,然后将它们相加以产生输出数组来完成高斯滤波。
只是为了让图片更清晰,还记得一维高斯内核是怎样的吗?
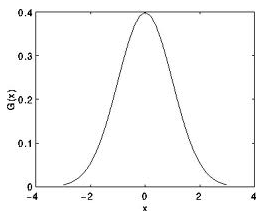
假设图像是1维,可以注意到位于中间的像素将具有最大权重。 随着它们与中心像素之间的空间距离的增加,其邻居的权重减小。
注意
请记住,2D高斯滤波核可以表示为:
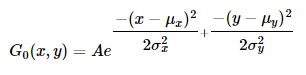
学过概率的同学应该知道,这是标准高斯函数。, μ 为均值, σ2为方差。
Median Filter
中值滤波器遍历信号的每个元素(在这种情况下是图像),并用其相邻像素的中值(位于评估像素周围的方形邻域中)替换每个像素。
Bilateral Filter
到目前为止,我们已经解释了一些主要目标是平滑输入图像的滤镜。 但是,有时滤波器不仅可以消除噪音,还可以平滑边缘(这不是想要的结果,边缘对图像很重要)。 为了避免这种情况(至少在某种程度上),我们可以使用双边滤波器。
以与高斯滤波器类似的方式,双边滤波器还考虑具有分配给它们中的每一个的权重的相邻像素。 这些权重有两个分量,第一个是高斯滤波器使用的相同权重。 第二个组件考虑了相邻像素和评估像素之间的强度差异。
有关更详细的说明,请查看此链接Bilateral Filtering for Gray and Color Images
3. Code
介绍
1. 导入图像
2. 应用4中滤波器
#include <iostream>
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
int DELAY_CAPTION = 1500;
int DELAY_BLUR = 100;
int MAX_KERNEL_LENGTH = 31;
Mat src; Mat dst;
char window_name[] = "Smoothing Demo";
int display_caption( const char* caption );
int display_dst( int delay );
int main( int argc, char ** argv )
{
namedWindow( window_name, WINDOW_AUTOSIZE );
const char* filename = argc >=2 ? argv[1] : "../data/lena.jpg";
src = imread( filename, IMREAD_COLOR );
if(src.empty())
{
printf(" Error opening image\n");
printf(" Usage: ./Smoothing [image_name -- default ../data/lena.jpg] \n");
return -1;
}
if( display_caption( "Original Image" ) != 0 )
{
return 0;
}
dst = src.clone();
if( display_dst( DELAY_CAPTION ) != 0 )
{
return 0;
}
if( display_caption( "Homogeneous Blur" ) != 0 )
{
return 0;
}
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
blur( src, dst, Size( i, i ), Point(-1,-1) );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}
if( display_caption( "Gaussian Blur" ) != 0 )
{
return 0;
}
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
GaussianBlur( src, dst, Size( i, i ), 0, 0 );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}
if( display_caption( "Median Blur" ) != 0 )
{
return 0;
}
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
medianBlur ( src, dst, i );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}
if( display_caption( "Bilateral Blur" ) != 0 )
{
return 0;
}
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
bilateralFilter ( src, dst, i, i*2, i/2 );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}
display_caption( "Done!" );
return 0;
}
int display_caption( const char* caption )
{
dst = Mat::zeros( src.size(), src.type() );
putText( dst, caption,
Point( src.cols/4, src.rows/2),
FONT_HERSHEY_COMPLEX, 1, Scalar(255, 255, 255) );
return display_dst(DELAY_CAPTION);
}
int display_dst( int delay )
{
imshow( window_name, dst );
int c = waitKey ( delay );
if( c >= 0 ) { return -1; }
return 0;
}4. 代码详解
Normalized Block Filter:
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
blur( src, dst, Size( i, i ), Point(-1,-1) );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}OpenCV提供函数blur()以使用此过滤器执行平滑。 我们指定4个参数(更多细节,请参阅参考资料):
src:源图像
dst:目标图像
size(w,h):定义要使用的内核的大小(宽度为w像素,高度为h像素)
point(-1,-1):表示锚点(被评估的像素)相对于邻域的位置。 如果存在负值,则将内核的中心视为锚点。
Gaussian Filter:
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
GaussianBlur( src, dst, Size( i, i ), 0, 0 );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}由函数GaussianBlur()执行:这里我们使用4个参数(更多细节,检查OpenCV引用):
src:源图像
dst:目标图像
size(w,h):要使用的内核的大小(要考虑的邻居)。 w和h必须是奇数和正数,否则将使用σx和σy参数计算大小。
σx:x中的标准偏差。 写0表示使用内核大小计算σx。
σy:y的标准偏差。 写0表示使用内核大小计算σy。
Median Filter:
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
medianBlur ( src, dst, i );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}- i: 内核的大小(只有一个,因为我们使用方形窗口)。 一定是奇数。
Bilateral Filter
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{
bilateralFilter ( src, dst, i, i*2, i/2 );
if( display_dst( DELAY_BLUR ) != 0 )
{
return 0;
}
}Provided by OpenCV function bilateralFilter() We use 5 arguments:(官方介绍)
-
d:每个像素邻域的直径。
σColor:颜色空间的标准偏差。
σSpace:坐标空间的标准差(以像素为单位)
Result
