-
ARM处理器工作状态及工作模式
-
ARM处理器的寄存组织
-
ARM处理器的异常
1.1处理器的工作状态
处理器的三种状态:
ARM状态:所有指令均为32位宽度
Thumb状态:指令为16位,代码密度更大,占用内存小
调试状态:处理器停机调试时
除Cortex-M系列处理器外,所有ARM处理器复位后开始执行代码是总是ARM状态
Cortex-M处理器只有Thumb-2指令集,所以没有ARM状态
ARM与Thumb间的转换:
1)BX指令
ARM状态 -> Thumb状态:将操作数寄存器最低位设置为1
2)BX指令
Thumb状态 -> ARM状态:将操作数寄存器最低位设置为0
1.2处理器的工作模式
| 工作模式 | 功能说明及CPSR[M4:M0] |
|---|---|
| 用户模式User | 程序正常执行工作状态 10000 |
| 快速中断模式FIQ | 处理高速中断,用于高速数据传输或通道处理 10001 |
| 外部中断模式IRQ | 普通中断处理 10010 |
| 管理模式SVC | 操作系统的保护模式,处理软中断SWI 10011 |
| 中止模式ABT | 处理存储器故障,实现虚拟存储器和存储器保护 10111 |
| 未定义指令模式UND | 处理未定义的指令陷阱,用于支持硬件协处理器仿真 11011 |
| 系统模式SYS | 运行特权级的操作系统任务 11111 |
2.1ARM状态下寄存器组织
ARM处理器共有37个寄存器,包括31个通用寄存器(含PC)和6个状态寄存器
1)通用寄存器(均为32位)
R0-R7:不分组寄存器
R8-R12:共两组 10个寄存器,标有fiq的代表FIQ专用,与其他模式地址重叠但内容不冲突
R13-R14:除用户模式和系统模式分别为SP(堆栈指针)和LR(程序链接寄存器)
2)状态寄存器
CPSR和SPSR
状态码格式:
30 29 28 27 26 …8 7 6 5 4 3 2 1 0
N Z C V Q … … . I F T M4 M3 M2 M1 M0
CPSR分为4个域:
标志域F(31:24)
状态域S(23:16)
扩展域X(15:8)
控制域C(7:0)
Thumb状态下的寄存器组织
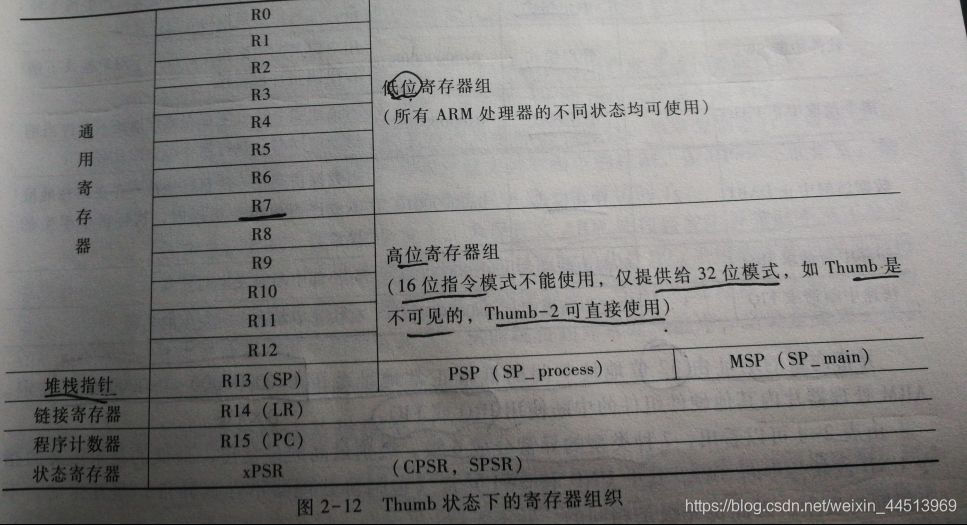
高位寄存器R8-R12在Thumb状态下不可见
2.3带MMU的ARM处理器中的控制寄存器
控制寄存器CP15:控制C0-C15共16个系统控制寄存器
3.1ARM 的异常
程序正常执行的过程中,每执行一条ARM指令PC值加4,每执行一条Thumb指令PC值加2
1)ARM异常种类,向量及优先级
- 复位RESET:管理模式,0x00000000
- 数据访问中止DABT:中止模式,0x00000010
- 快速中断请求FIQ:快速中断模式,0x0000001C
- 外部中断请求IRQ:外部中断模式,0x00000018
- 指令预取中止PABT:中止模式,0x0000000C
- 软件中断SWI:管理模式,0x00000008;未定义的指令UND:未定义指令中止模式,0x00000004
2)ARM异常中断响应过程
- 将CPSR的值保存到将要执行的异常中断对应的各自SPSR中
- 设置当前状态寄存器CPSR的相应位
设置CPSR中M4-M0进入相应工作模式
- 将引起异常指令的下一条地址(断点地址)保存到新的异常工作模式LR(R14),
- 给程序计数器PC强制赋值,转入向量地址
3)从异常处理程序返回
复位发生后,系统自动从0x00000000开始重新执行程序,故复位异常处理程序执行完无需返回
- 恢复原来被保护的用户寄存器
- 将CPSR_mode寄存器值复制到CPSR中
- 根据异常类型将PC值恢复为断点地址
- 清除CPSR中的中断禁止标志I,F,开放外部中断IRQ和快速中断FIQ
程序状态字和断点地址的恢复必须同时进行
为使ARM处理器发生异常时不至于处于未知状态,首先要进行异常向量的初始化处理