Lecture 8: Noise and Error 噪声和误差
8.1 Noise and Probabilistic Target 噪音和概率目标
我们原有的机器学习流程如下图:
- 有一个未知的目标函数 ,还有一个未知的分布 ,训练样本的输入 根据 生成,训练样本的输出 根据 生成。
- 我们要给机器学习系统一个比较好的假设空间 ,也就是说,这个 ,要保证 有限,但是 也不能过小,要适当。
- 然后我们要给机器学习系统同喂一个演算法 , 会在 中找到它认为最接近目标 的
- 找到这个 后,我们的机器学习流程就走完了。
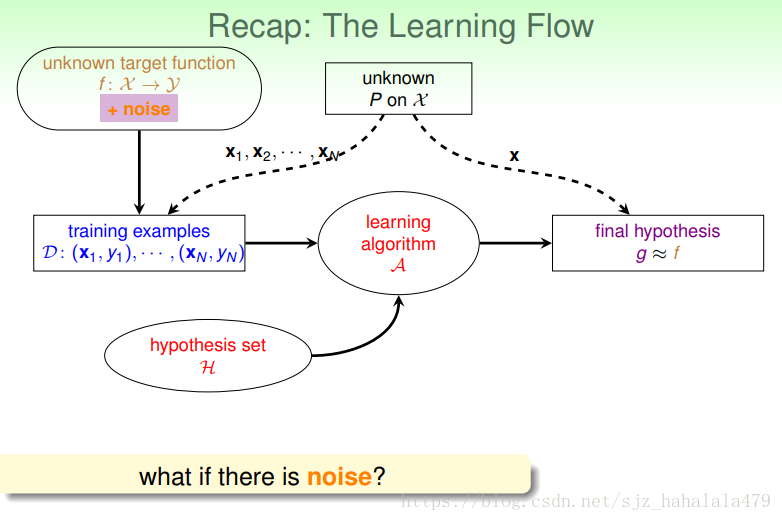
但是,我们之前考虑的,都是没有噪声和杂质的训练数据;如果有噪声,这个机器学习流程还适用吗?我们之前计算的 还适用吗?
之前在 的 算法里简短地介绍了噪声。这里,我们更加全面地描述噪声。噪声一般分为三种情况:
- :被误标记的输出
- :同样的输入,被标记为不同的分类
- :输入特征本身不准确
我们回过头来,看之前计算
时,使用的“从桶中抽取橘色球和绿色球”的例子:
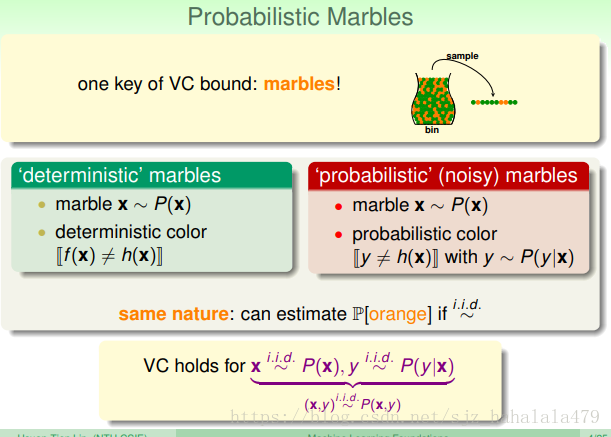
- 之前,从桶中取球,取出的球的颜色是确定的,即“deterministic”的。
- 之前,我们取弹珠,是按照分布 取的;弹珠的颜色,根据假设 与 是否相等,不一样,漆橘色,一样,漆绿色
- 如果加上了噪声,取出的球的颜色就不是确定的了,而是概率性的,因为我们也不知道,这个球它的颜色是本身就应该是这个颜色,还是说本不该是这个颜色,被误涂成了这个颜色。也就是说,我们无法完全通过球的颜色判断 与 的关系。
- 但是,由于噪声还是少数情况,所以,我们还是可以通过不同球颜色的比例来推断 的概率。
- 现在,
的分布是服从
的。
,指在
的条件下
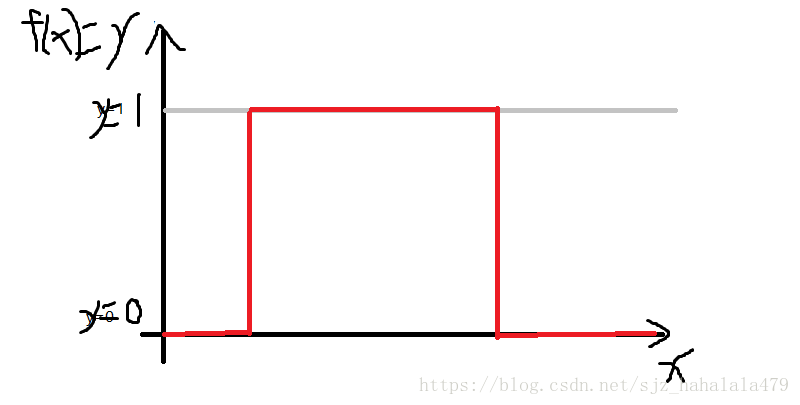
出现的概率分布。我们还是举二分类的例子,如果是
函数分布,
的值只有1和0两种,即:
可以看到上图,y的值只有1和0。
而如果是 ,也就是Y是服从一个条件概率分布的话,效果如图:
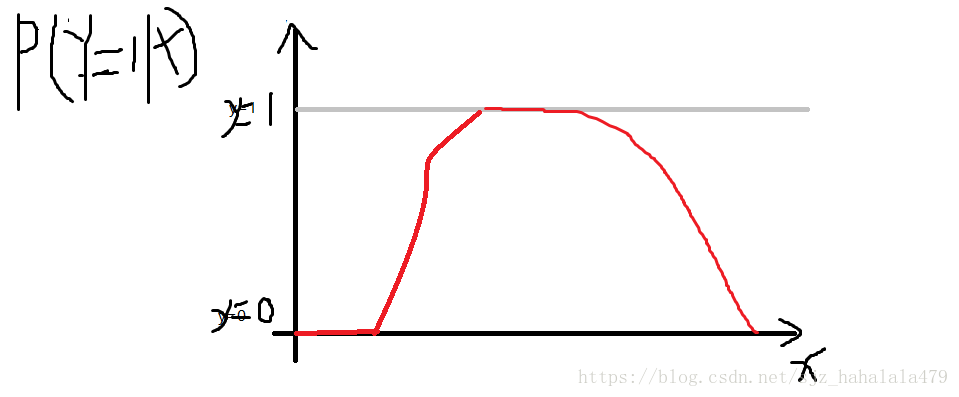
图中可以看到这个 的概率随着x的变化时不断变化的。我们可以看成,由于噪声的作用,使得 这件事情变得不确定起来。
但是,由于 的取值是相互独立的,也就是 服从于 ,且是独立同分布的;之前也说道 服从于分布 ,也是独立同分布的。我们仍可以通过数学方法证明,存在噪声的 对,同样适用于
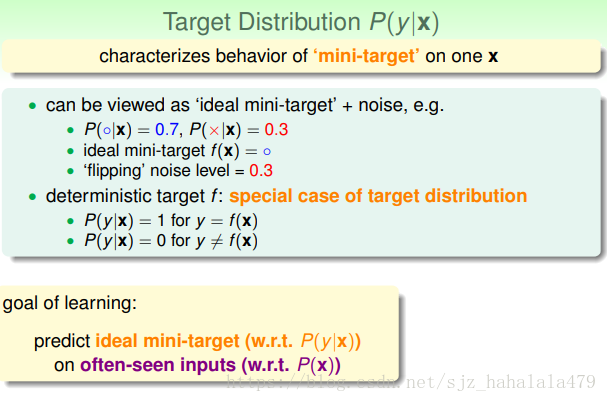
我们把 叫做目标分布,这个目标分布,他描述的是,在一个 上,我们理想的“迷你目标”是什么。
举个图上的例子,在某个点
上
我们说,这个点的理想目标是
剩下 的概率,我们视为噪声误差。
确定的目标函数
,可以看作目标分布
的特殊情况。
还是以“桶中橘色绿色球”为例,如果
- 就是1
- 就是0
所以,机器学习的目标变成了:
在输入
上,预测它的理想化迷你目标分布
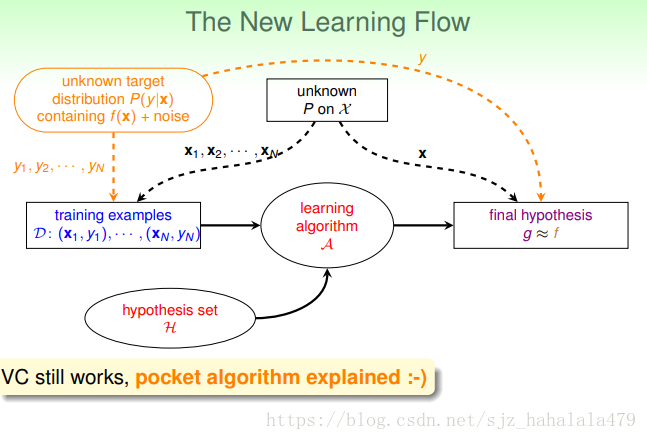
所以,新的机器学习流程图如上。
它的变化,就是左上角的目标函数,变成了目标分布。
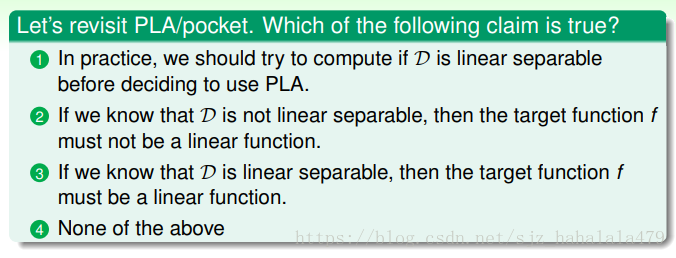
这个Fun Time问题还是很值得思考的。首先1是不对的,因为如果我们事先可以确定样本 是线性分割的,那么我们顺便可以确定那条线长什么样,就不需要PLA了;2也不正确,因为 可能有噪声的存在,使得不线性分割,但目标函数仍有可能是线性函数;3不正确的原因是, 样本可能存在样本偏差,万一换一个 就不线性可分了呢?
8.2 Error Measure 错误度量
机器学习的目标是使学习到的假设
尽可能地接近于目标函数
,如何去衡量
的相近程度呢?我们之前给出的方法是计算
,
越小,代表在训练样本
外,
的表现就越相似。

这里
我们使用的
,有三个特性
- out-of-sample:我们考虑的 是训练样本外抽样的 或未知的 。
- pointwise: 我们可以在每个点 上对 进行评估。
- classification:我们之前限定在二元分类方法,即判断 。我们常常把”classification error” 也叫做 “0/1 error”。
更一般地,我们将 之间的错误衡量,称为 。
很多时候,我们进行错误衡量的方式,是先计算每个点上的错误度,然后把这些错误加起来,再平均,我们把这种错误衡量的方式叫做”Pointwise error measure”。
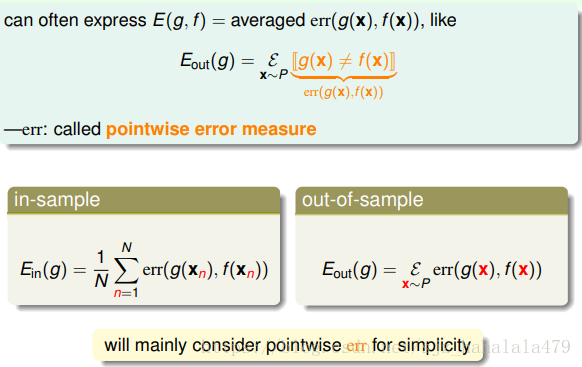
如果是“in-sample”,我们的平均计算方法,就是求和再比上样本量。如果有噪声的话,这里的
可以用
替换。
如果是“out-of-sample”,我们就是计算这个分布的期望。如果有噪声的话,使用
替代
;使用
替代
。
大多时候,使用“pointwise err”就足够了。
有两种重要的”pointwise err”衡量方式:
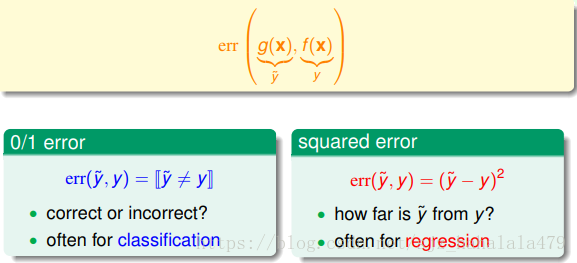
一种是”0/1 error”,主要用在分类问题上;
一种是”squared error”,主要用在回归问题上。
我们需要慎重地考虑错误衡量的选择方式。上节提到,我们为每个点 给出了一个理想的”mini-target”。这个点最终是如何被机器学习演算法选取出来的呢?和 和”err”有关。
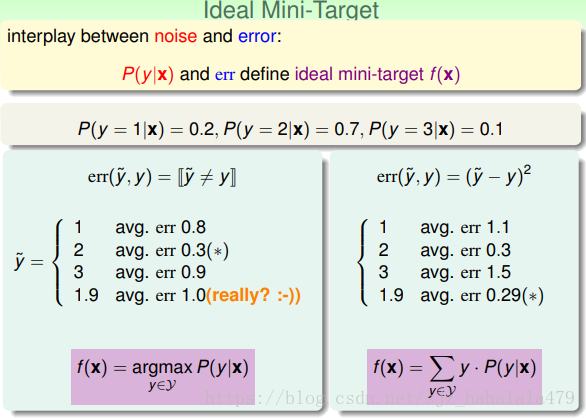
如图所示的例子,同样的
配上不同的错误衡量方式,选取的”ideal mini-target”也是不同的。
一般来说,如果是分类问题,“ideal mini-target”是概率最大的那个
;而如果是回归问题,”ideal mini-target”是平均值/加权平均值。
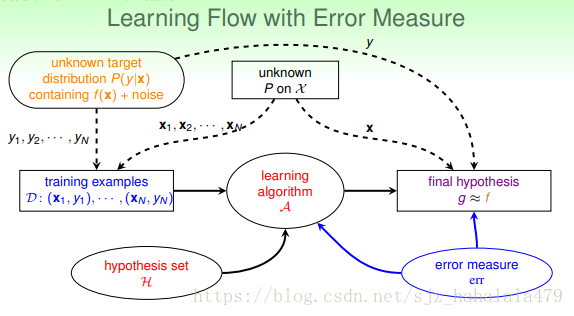
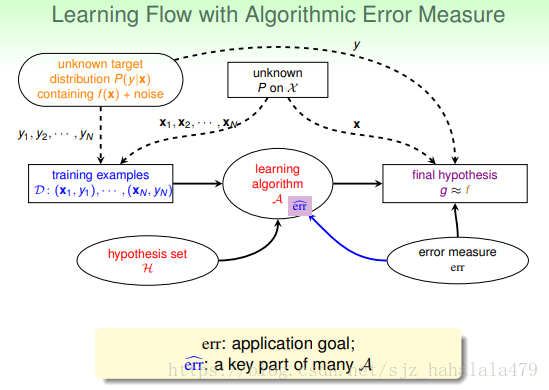
更新后的学习流程,增加了错误衡量组件;即我们需要告诉演算法如何衡量错误。

最后,林教授提到,扩展的”vc bound”对于大多数假设和错误衡量都是适用的。但是具体的推导过于繁琐和复杂,这里不再赘述。
8.3 Algorithmic Error Measure 演算法的错误衡量
根据不同的应用,我们需要选择不同的错误衡量方式。
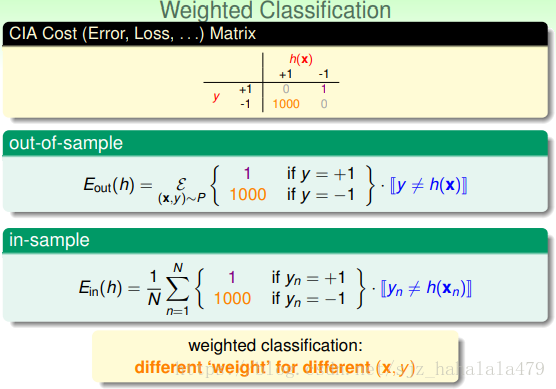
比如同样是分类问题,超市销售的指纹识别和CIA安保的指纹识别衡量是不同的。
二元分类问题,有两种分类错误的情形。
- false accept: 错误地接受;根据结果本来应该拒绝的,系统却错误地接受了。即 。
- false reject:错误地拒绝;根据结果本来应该接受的,系统却错误地拒绝了。即 。
下图是描述二元分类四种情况的混淆矩阵。
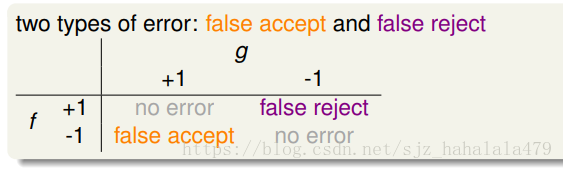
“0/1 error “对两种类型的错误等价地进行处罚。
但是如上文所说,不同的分类问题,错误衡量的方式是不同的。
- 比如,超市打折:一个顾客被错误地拒绝打折,和一个顾客被错误地接收打折,给超市带来的损失是不同的。错误地拒绝,顾客会很生气,超市会损失客源;错误地接受,超市只是少赚点钱,而且可以通过另外的渠道追回损失。这样看来,给”false reject”类型的错误应该设置更高的权重,因为犯这种错误的损失更大。
- 如果是CIA门禁系统识别人员呢。一个人员被错误地接收进入系统,比一个人员被错误地拒绝进入系统,造成的损失大多了。所以,这种情形,给”false accept”类型的错误,应设置更高的权重。
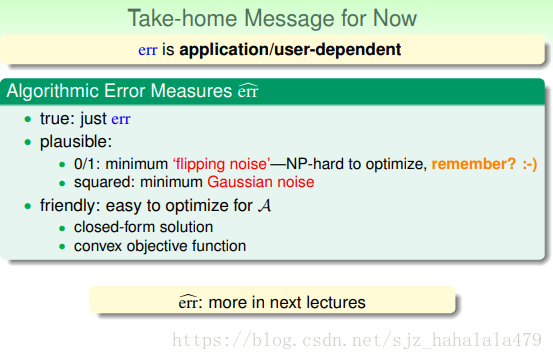
所以,我们说:错误衡量”err”是依赖于应用的,也是依赖于客户的选择的。在设计演算法的错误衡量 时
- 最好的情形就是需要什么样的错误衡量”err”,就让 即可。但是,很多时候,无法使用“err”作为我们的 。因为,客户一般很难将自己需要的“err”用数学化的语言表现出来。比如,我们跑去问CIA,“false accept”错误的权重你们觉得多少合理,1000或5000?他们自己其实也没概念。
- 所以,在设计演算法的
时,通常采用替代的办法。有两种替代方式,一种是plausible的,即说服我们自己的有意义的错误替代:
- “0/1 error”:之前有提到,使用这种错误衡量方法。是最小化”flipping noise”。
- “squared error”:如果我们相信噪声服从高斯分布,那么我们可以通过最小化“Gaussian noise”来最小化错误度。
- 但是,“0/1 error”的优化是NP hard的,不好优化。我们可以选用另一种friendly的替代方式,方便优化。
- 凹凸函数
- 封闭的解
现在我们将系统的学习流程再做一个更新。加入了 。这里 是我们真正的错误衡量目标;而 是我们认为的 的有效替代。
8.4 Weighted Classification 带权重的分类
在二元分类中,根据不同的应用情景,有不同的错误衡量方式。对于“false reject”和“false accept”两种类型的错误,也会赋予不同的权重。
这种带权重形式的分类问题,应该如何学习呢?
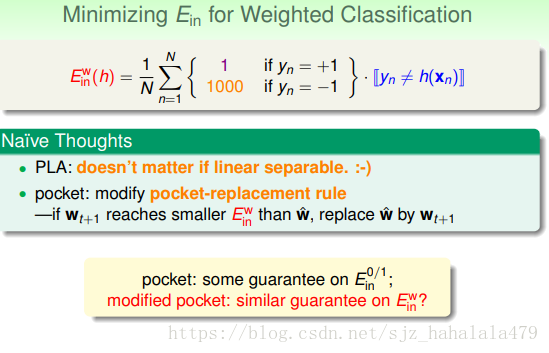
直观的想法是
- PLA可以直接用。因为我们没有改变样本的分布,只要样本线性可分,我们总能使找到 的那条线。
- 大多数情况样本会有噪声,这时候要用到pocket。pocket算法修改一部分步骤也可以直接用。
- 就是当 得到了比 更小的 时,将 。这里其实就是用新的 替代了元算法中的 。
- 虽然我们直观上认为这样做是没问题的。但是我们能给出理论上的证明吗?
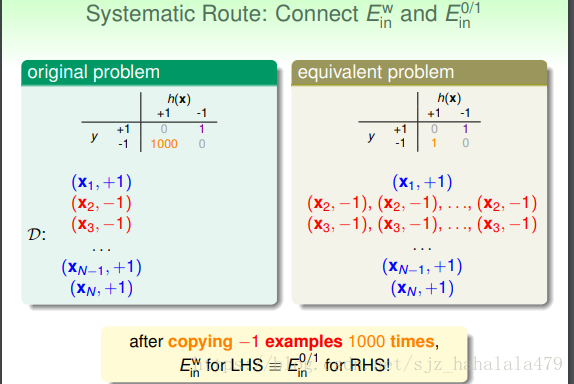
如图,我们可以看到,将 的点复制1000遍后(即扩大了数据样本空间 ),左式的 和右式是相等的。

但是,直接copy(硬拷贝)很费计算机空间。我们可以使用“虚拷贝”的方法,在概率上给check到“-1”样本的机会扩大1000倍,这样使用“weighted pocket algorithm”,我们就可以解决“weighted classification”的问题。
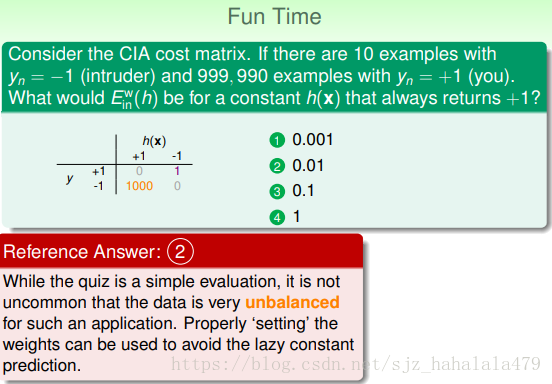
Fun Time这个问题涉及到机器学习实战中的很普遍的一个情景,就是正负样本不平衡。调整正负样本的权重是一个很有效的解决方式。