导言:
图神经网络(Graph Neural Networks,GNNs)和自动驾驶技术代表了人工智能领域的两大热点,它们的结合有望为智能交通系统带来质的飞跃。本文将深入研究图神经网络与自动驾驶的结合方向、各自的研究侧重点、目前的研究进展、应用的关键技术、潜在的实际场景、未来的发展趋势以及相关的学术链接。

1. 图神经网络与自动驾驶的结合方向:
1.1 图神经网络在自动驾驶中的应用:
- 场景感知与理解: 利用GNNs对复杂交通场景进行图结构建模,实现对车辆、行人、道路等要素的感知和理解。
- 路径规划优化: 使用图神经网络优化自动驾驶车辆的路径规划,考虑实时交通和道路状态。
1.2 自动驾驶的应用方向:
- 感知与决策融合: 实现车辆感知和决策模块的紧密结合,提高自动驾驶系统的智能水平。
- 模态融合: 将多模态数据融入图神经网络,使车辆更全面地理解环境。
1.3 结合方向:
- 交互式场景建模: 利用图神经网络建模车辆与周围环境的交互关系,提高系统对复杂场景的适应能力。
- 动态图结构处理: 针对实时变化的交通状况,研究图神经网络如何处理动态图结构。
2. 各自的侧重点:
2.1 图神经网络在自动驾驶中的侧重点:
- 图结构嵌入: GNNs注重如何将车辆、道路、交通信号等元素嵌入图结构中,以便进行有效的图神经网络学习。
- 边缘计算: 考虑在边缘设备上实现图神经网络的实时计算,减少对中心服务器的依赖。
2.2 自动驾驶的侧重点:
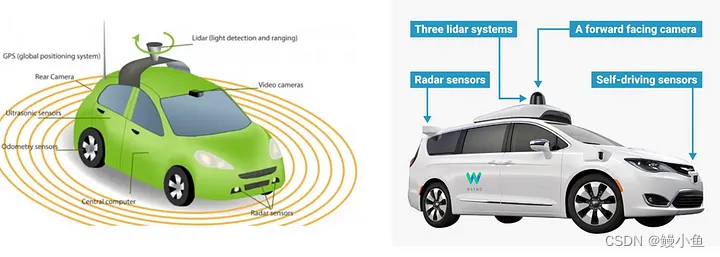
- 传感器融合: 自动驾驶系统聚焦传感器数据的融合,包括摄像头、激光雷达、毫米波雷达等多源信息的综合利用。
- 人机交互设计: 优化车辆与驾驶者之间的交互方式,保证安全而友好的自动驾驶体验。
3. 当前的研究和使用的技术:
3.1 图神经网络在自动驾驶中的研究进展:
- 空间-时间图神经网络: 研究在自动驾驶场景中构建能处理时空关系的图神经网络模型。
- 图神经网络用于车辆跟踪: 基于图神经网络的车辆跟踪算法,提高车辆感知的精度。
3.2 自动驾驶的技术创新:
- 端到端学习: 探索端到端学习方法,简化自动驾驶系统的设计和部署。
- 自监督学习: 利用自监督学习提高自动驾驶系统在未标记数据上的性能。
4. 可能应用的实际场景:
4.1 智能城市交通管理:
- 利用图神经网络优化城市交通流,提高交通效率和减少拥堵。
4.2 自动驾驶出租车服务:
- 基于图神经网络和自动驾驶技术实现智能出租车服务,提升城市出行体验。
5. 未来的发展趋势:
5.1 技术深度融合:
- 图神经网络和自动驾驶技术将更深度地融合,实现对复杂交通场景的全面理解和高效决策。
5.2 自我学习系统:
- 探索构建自我学习的自动驾驶系统,通过图神经网络对新场景进行快速学习。
6. 相关的学术链接:
- Graph Neural Networks in Autonomous Driving: A Survey
 https://scholar.google.co.jp/scholar?q=Graph+Neural+Networks+in+Autonomous+Driving:+A+Survey&hl=zh-CN&as_sdt=0&as_vis=1&oi=scholart
https://scholar.google.co.jp/scholar?q=Graph+Neural+Networks+in+Autonomous+Driving:+A+Survey&hl=zh-CN&as_sdt=0&as_vis=1&oi=scholart - Towards Data-Efficient Learning for Autonomous Vehicles with Graph Neural Networkshttps://scholar.google.co.jp/scholar?q=Towards+Data-Efficient+Learning+for+Autonomous+Vehicles+with+Graph+Neural+Networks&hl=zh-CN&as_sdt=0&as_vis=1&oi=scholart
结语:
图神经网络与自动驾驶的结合将推动智能交通系统向更高层次发展。期待在不久的将来,我们能见证这两者的完美融合,为人类出行带来更安全、便捷、智能的未来。
完结撒花:
愿图神经网络与自动驾驶的融合,为未来智能交通的发展铺平道路,让道路更加安全、畅通!