1.rqt_graph 出现错误
sudo gedit 文件名.后缀2.catkin_make出现错误
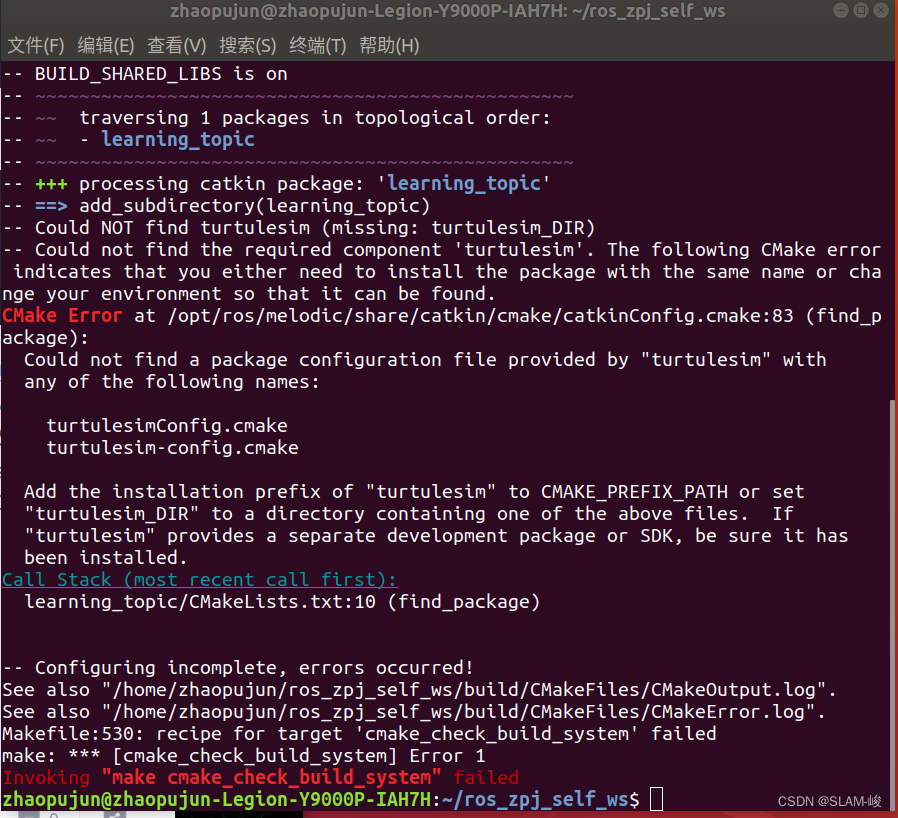
仔细看 是找不到turtulesim!!!! 应该是turtlesim!!!!单词打错了!!!
在learning_topic中修改CMakelists.tet中findpakage和package.xml中depend的单词
再次catkin_make问题解决,编译后不要忘记source一下
参考:
ros学习_0412_publisher的编程实现_王思笨的博客-CSDN博客_could not find turtlesim (missing: turtlesim_dir)话题模型#mermaid-svg-YuzkFB3dg6vf11ON .label{font-family:'trebuchet ms', verdana, arial;font-family:var(--mermaid-font-family);fill:#333;color:#333}#mermaid-svg-YuzkFB3dg6vf11ON .label text{fill:#333}#mermaid-svg-YuzkFB3dg6vf11ON .node rect,#mermaid-svg-YuzkFhttps://blog.csdn.net/m0_54218171/article/details/1156116143 rosrun learning_topic <订阅者的文件pose>出现错误,找不到编译后的文件,tab键也不好用
(subscriber时出现的问题)
ctrl+H 打开隐藏的 .bashrc文件,加入source自己的工作空间目录,便解决了!