PCL基础_PCL< Point Cloud Library )
- 点云相关研究基础上建立起来的大型跨平台开源C++ 编程库
- 涉及点云获取滤波、分割、配准、检索、特征提取、识别 、追踪、曲面重建、可视化等,
- 支持多种操作系统,可在Windows 、Linux:, Android 、Mac 05 X 、部分嵌入式实时系统上运行.
- OpenCV 是2 D信息获取与处理的结晶,那么PCL 就在3 D 信且获取与处理上具有同等地位.PCL 是BSD 握权方式,可以免费进行商业和学术应用.
PCL的结构和内容
-
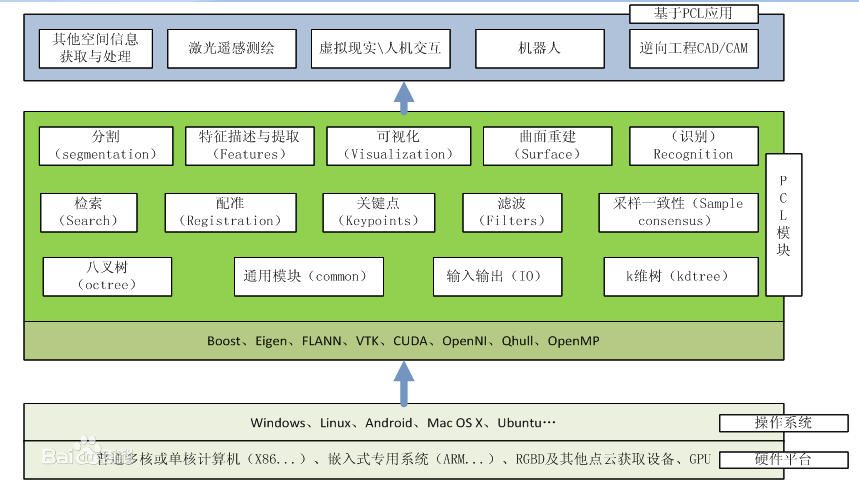
PCL 架构图如图,,对于3D 点云处理来说, PCL 完全是一个模块化的现代C+ + 模板库。其基于以下第三方库:Boost 、Eigen 、FLANN 、VTK 、CUDA 、OpenNI 、QHull , 实现点云相关的获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
-
PCL 中的所有模块和. 算法都是通过Boost 共享指针来传送数据,因而避免了多次复制系统中已存在的数据的需要。
-
从0.6 版本开始, PCL 就已经被移入到 Windows 、Mac OS 和Linux 系统,并且在Android 系统也已经开始投入使用,这使得PCL 的应用容易移植与多方发布。
-
从算法的角度, PCL 是指纳入了多种操作点云数据的三维处理算法,其中包括过滤、特征估计、表面重建、模型拟合和分割、定位搜索等。
-
在PCL中一个处理管道的基本接口程序如下:
-
- 创建处理对象〈例如过滤、特征估计、分割等) .
- 使用set l npu t C l o ud 通过输入点云数据,处理模块.
- 设置算法相关参数
- 调用计算(或过滤、分割等〉得到输出.
-
01 common
pcl_common中主要是包含了PCL库常用的公共数据结构和方法,比如PointCloud的类和许多用于表示点,曲面,法向量,特征描述等点的类型,用于计算距离,均值以及协方差,角度转换以及几何变化的函数。
common模块中的头文件
angles.h 定义了标准的C接口的角度计算函数
centriod.h 定义了中心点的估算以及协方差矩阵的计算
commo.h 标准的C以及C++类,是其他common 函数的父类
distance.h 定义标准的C接口用于计算距离
file_io.h 定义了一些文件帮助写或者读方面的功能。
random.h 定义一些随机点云生成的函数
geometry.h 定义一些基本的几何功能的函数
intersection.h 定义线与线相交的函数
norm.h 定义了标准的C方法计算矩阵的正则化
time.h 定义了时间计算的函数
Point_types.h 定义了所有PCL实现的点云的数据结构的类型
common模块中的基本函数
pcl::rad2deg(fllat alpha)
从弧度到角度
pcl::deg2rad(float aipha)
从角度到弧度
pcl::normAngle(float alpha)
正则化角度在(-PI,PI)之间
pcl::compute3DCentroid (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, 4, 1 > ¢roid)
计算给定一群点的3D中心点,并且返回一个三维向量
pcl::computeCovarianceMatrix (const pcl::PointCloud< PointT > &cloud, const Eigen::Matrix< Scalar, 4, 1 > ¢roid, Eigen::Matrix< Scalar, 3, 3 > &covariance_matrix)
计算给定的三维点云的协方差矩阵。
pcl::computeMeanAndCovarianceMatrix (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, 3, 3 > &covariance_matrix, Eigen::Matrix< Scalar, 4, 1 > ¢roid
计算正则化的3*3的协方差矩阵以及给定点云数据的中心点
pcl::demeanPointCloud (const pcl::PointCloud< PointT > &cloud_in, const Eigen::Matrix< Scalar, 4, 1 > ¢roid, pcl::PointCloud< PointT > &cloud_out)
pcl::computeNDCentroid (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > ¢roid)
利用一组点的指数对其进行一般的、通用的nD中心估计。
pcl::getAngle3D (const Eigen::Vector4f &v1, const Eigen::Vector4f &v2, const bool in_degree=false)
计算两个向量之间的角度
pcl::getMeanStd (const std::vector< float > &values, double &mean, double &stddev)
同时计算给定点云数据的均值和标准方差
pcl::getPointsInBox (const pcl::PointCloud< PointT > &cloud, Eigen::Vector4f &min_pt, Eigen::Vector4f &max_pt, std::vector< int > &indices)
在给定边界的情况下,获取一组位于框中的点
pcl::getMaxDistance (const pcl::PointCloud< PointT > &cloud, const Eigen::Vector4f &pivot_pt, Eigen::Vector4f &max_pt)
给定点云数据中点与点之间的最大距离的值
pcl::getMinMax3D (const pcl::PointCloud< PointT > &cloud, PointT &min_pt, PointT &max_pt)
获取给定点云中的在XYZ轴上的最大和最小值
pcl::getCircumcircleRadius (const PointT &pa, const PointT &pb, const PointT &pc)
计算由三个点pa、pb和pc构成的三角形的外接圆半径。
pcl::getMinMax (const PointT &histogram, int len, float &min_p, float &max_p)
获取点直方图上的最小值和最大值。
pcl::calculatePolygonArea (const pcl::PointCloud< PointT > &polygon)
根据给定的多边形的点云计算多边形的面积
pcl::copyPoint (const PointInT &point_in, PointOutT &point_out)
从Point_in把字段数据赋值到Point_out
pcl::lineToLineSegment (const Eigen::VectorXf &line_a, const Eigen::VectorXf &line_b, Eigen::Vector4f &pt1_seg, Eigen::Vector4f &pt2_seg)
获取两条三维直线之间的最短三维线段
pcl::sqrPointToLineDistance (const Eigen::Vector4f &pt, const Eigen::Vector4f &line_pt, const Eigen::Vector4f &line_dir)
获取点到线的平方距离(由点和方向表示)
pcl::getMaxSegment (const pcl::PointCloud< PointT > &cloud, PointT &pmin, PointT &pmax)
在给定的一组点中获得最大分段,并返回最小和最大点。
pcl::eigen22 (const Matrix &mat, typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定最小特征值及其对应的特征向量
pcl::computeCorrespondingEigenVector (const Matrix &mat, const typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定对称半正定输入矩阵给定特征值对应的特征向量
pcl::eigen33 (const Matrix &mat, typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定对称半正定输入矩阵最小特征值的特征向量和特征值
pcl::invert2x2 (const Matrix &matrix, Matrix &inverse)
计算2x2矩阵的逆。
pcl::invert3x3SymMatrix (const Matrix &matrix, Matrix &inverse)
计算3x3对称矩阵的逆。
pcl::determinant3x3Matrix (const Matrix &matrix)
计算3x3矩阵的行列式
pcl::getTransFromUnitVectorsZY (const Eigen::Vector3f &z_axis, const Eigen::Vector3f &y_direction, Eigen::Affine3f &transformation)
获得唯一 的3D旋转,将Z轴旋转成(0,0,1)Y轴旋转成(0,1,0)并且两个轴是正交的。
pcl::getTransformationFromTwoUnitVectorsAndOrigin (const Eigen::Vector3f &y_direction, const Eigen::Vector3f &z_axis, const Eigen::Vector3f &origin, Eigen::Affine3f &transformation)
得到将origin转化为(0,0,0)的变换,并将Z轴旋转成(0,0,1)和Y方向(0,1,0)
pcl::getEulerAngles (const Eigen::Transform< Scalar, 3, Eigen::Affine > &t, Scalar &roll, Scalar &pitch, Scalar &yaw)
从给定的变换矩阵中提取欧拉角
pcl::getTranslationAndEulerAngles (const Eigen::Transform< Scalar, 3, Eigen::Affine > &t, Scalar &x, Scalar &y, Scalar &z, Scalar &roll, Scalar &pitch, Scalar &yaw)
给定的转换中,提取XYZ以及欧拉角
pcl::getTransformation (float x, float y, float z, float roll, float pitch, float yaw)
从给定的平移和欧拉角创建转换矩阵
pcl::saveBinary (const Eigen::MatrixBase< Derived > &matrix, std::ostream &file)
保存或者写矩阵到一个输出流中
pcl::loadBinary (Eigen::MatrixBase< Derived > const &matrix, std::istream &file)
从输入流中读取矩阵
pcl::lineWithLineIntersection (const Eigen::VectorXf &line_a, const Eigen::VectorXf &line_b, Eigen::Vector4f &point, double sqr_eps=1e-4)
获取空间中两条三维直线作为三维点的交点。
pcl::getFieldIndex (const pcl::PCLPointCloud2 &cloud, const std::string &field_name)
获取指定字段的索引(即维度/通道)
pcl::getFieldsList (const pcl::PointCloud< PointT > &cloud)
获取给定点云中所有可用字段的列表
pcl::getFieldSize (const int datatype)
获取特定字段数据类型的大小(字节)。
pcl::concatenatePointCloud (const pcl::PCLPointCloud2 &cloud1, const pcl::PCLPointCloud2 &cloud2, pcl::PCLPointCloud2 &cloud_out)
连接 pcl::PCLPointCloud2类型的点云字段