1、pyramid pooling模块(也叫PSP模块)
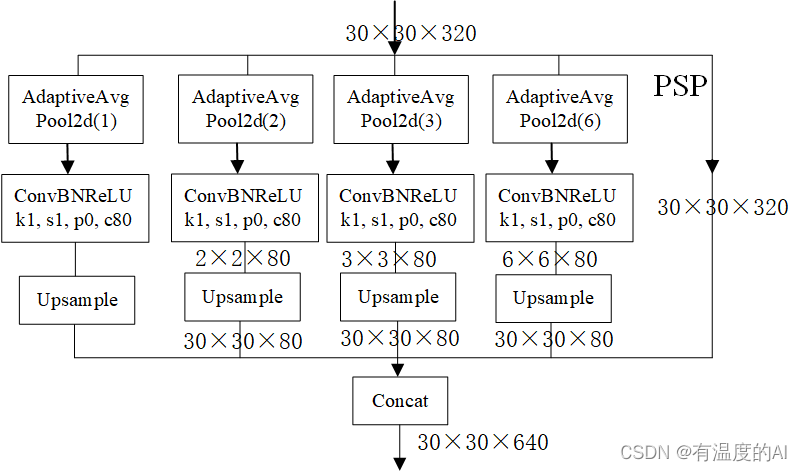
# 若输入为30*30*320
class PyramidPooling(nn.Module):
def __init__(self, in_channels, norm_layer, up_kwargs):
super(PyramidPooling, self).__init__()
self.pool1 = nn.AdaptiveAvgPool2d(1)
self.pool2 = nn.AdaptiveAvgPool2d(2)
self.pool3 = nn.AdaptiveAvgPool2d(3)
self.pool4 = nn.AdaptiveAvgPool2d(6)
out_channels = int(in_channels/4) #80
self.conv1 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv2 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv3 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv4 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
# bilinear interpolate options
self._up_kwargs = up_kwargs
def forward(self, x):
_, _, h, w = x.size()
feat1 = F.interpolate(self.conv1(self.pool1(x)), (h, w), **self._up_kwargs)
feat2 = F.interpolate(self.conv2(self.pool2(x)), (h, w), **self._up_kwargs)
feat3 = F.interpolate(self.conv3(self.pool3(x)), (h, w), **self._up_kwargs)
feat4 = F.interpolate(self.conv4(self.pool4(x)), (h, w), **self._up_kwargs)
return torch.cat((x, feat1, feat2, feat3, feat4), 1)2、strip pooling module
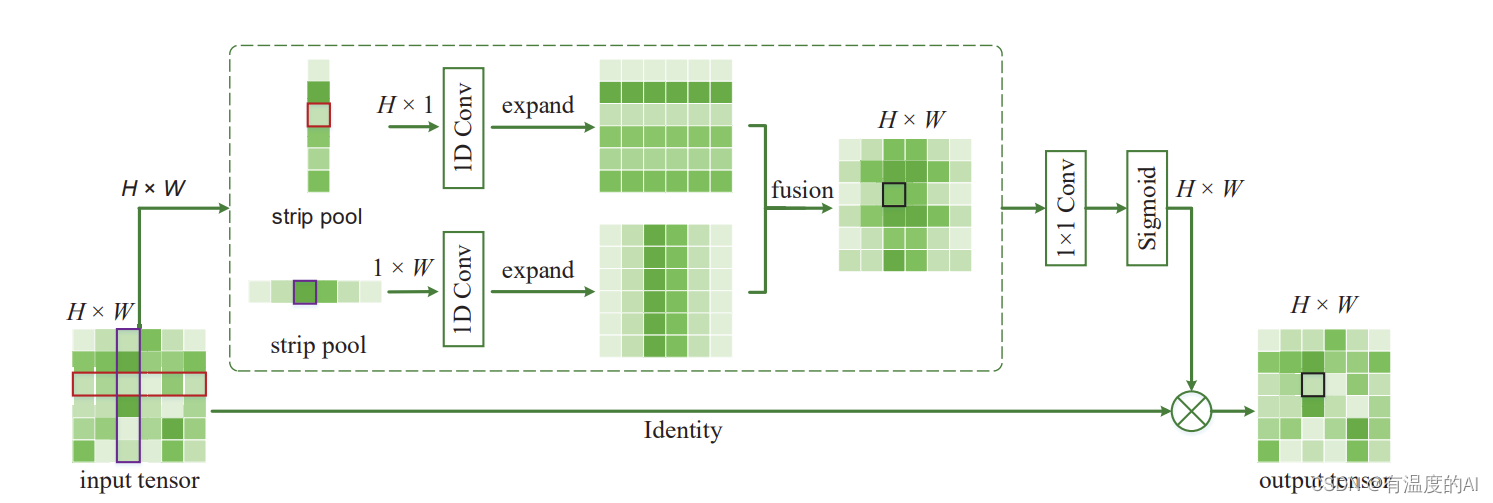
输入一个特征图,C×H×W,经过水平和竖直条纹池化后变为H×1和1×W,使用求平均的方法,对池化核内的元素值求平均,并以该值作为池化输出值;随后经过卷积对两个输出feature map分别沿着左右和上下进行扩充,扩充后两个特征图尺寸相同,对扩充后的特征图对应相同位置进行逐像素求和得到H×W的特征图;最后通过1×1的卷积与sigmoid处理后与原输入图对应像素相乘得到了最终的输出结果。
class StripPooling(nn.Module):
def __init__(self, in_channels, up_kwargs={'mode': 'bilinear', 'align_corners': True}):
super(StripPooling, self).__init__()
self.pool1 = nn.AdaptiveAvgPool2d((1, None))#1*W
self.pool2 = nn.AdaptiveAvgPool2d((None, 1))#H*1
inter_channels = int(in_channels / 4)
self.conv1 = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv2 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (1, 3), 1, (0, 1), bias=False),
nn.BatchNorm2d(inter_channels))
self.conv3 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (3, 1), 1, (1, 0), bias=False),
nn.BatchNorm2d(inter_channels))
self.conv4 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv5 = nn.Sequential(nn.Conv2d(inter_channels, in_channels, 1, bias=False),
nn.BatchNorm2d(in_channels))
self._up_kwargs = up_kwargs
def forward(self, x):
_, _, h, w = x.size()
x1 = self.conv1(x)
x2 = F.interpolate(self.conv2(self.pool1(x1)), (h, w), **self._up_kwargs)#结构图的1*W的部分
x3 = F.interpolate(self.conv3(self.pool2(x1)), (h, w), **self._up_kwargs)#结构图的H*1的部分
x4 = self.conv4(F.relu_(x2 + x3))#结合1*W和H*1的特征
out = self.conv5(x4)
return F.relu_(x + out)
3、Mixed Pooling Module
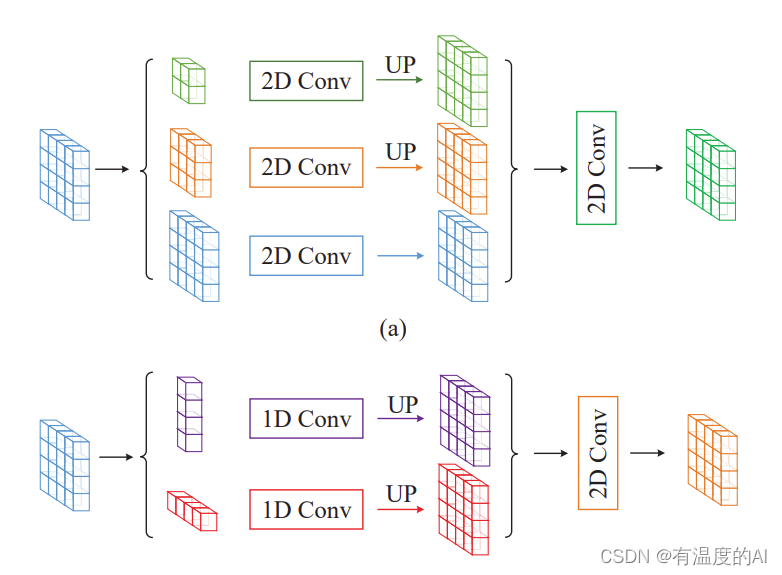
如果将网络中的所有pooling操作全部换成strip pooling操作,则会导致原来非长条物体的检测效果变差。因此,将strip pooling和pyramid pooling结合起来,构造mixed pooling module模块,兼顾长条形和非长条形物体的效果,同时捕获不同位置之间的短距离和长距离依赖关系。MPM包括传统空间池化和条形池化两个子模块,分别用于捕获短距离(局部)依赖和长距离依赖,从而更好地适应于不同形状物体。
class MPM(nn.Module):
def __init__(self, in_channels, pool_size, up_kwargs={'mode': 'bilinear', 'align_corners': True}):
super(MPM, self).__init__()
inter_channels = int(in_channels / 4)
# 空间池化
self.pool1 = nn.AdaptiveAvgPool2d(pool_size[0])
self.pool2 = nn.AdaptiveAvgPool2d(pool_size[1])
# strip pooling
self.pool3 = nn.AdaptiveAvgPool2d((1, None))
self.pool4 = nn.AdaptiveAvgPool2d((None, 1))
self.conv1_1 = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv1_2 = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv2_0 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels))
self.conv2_1 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels))
self.conv2_2 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels))
self.conv2_3 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (1, 3), 1, (0, 1), bias=False),
nn.BatchNorm2d(inter_channels))
self.conv2_4 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (3, 1), 1, (1, 0), bias=False),
nn.BatchNorm2d(inter_channels))
self.conv2_5 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv2_6 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.ReLU(True))
self.conv3 = nn.Sequential(nn.Conv2d(inter_channels * 2, in_channels, 1, bias=False),
nn.BatchNorm2d(in_channels))
# bilinear interpolate options
self._up_kwargs = up_kwargs
def forward(self, x):
b, c, h, w = x.size()
x1 = self.conv1_1(x)
x2 = self.conv1_2(x)
x2_1 = self.conv2_0(x1)
x2_2 = F.interpolate(self.conv2_1(self.pool1(x1)), size=[h, w], **self._up_kwargs)
x2_3 = F.interpolate(self.conv2_2(self.pool2(x1)), size=(h, w), **self._up_kwargs)
x2_4 = F.interpolate(self.conv2_3(self.pool3(x2)), size=(h, w), **self._up_kwargs)
x2_5 = F.interpolate(self.conv2_4(self.pool4(x2)), size=(h, w), **self._up_kwargs)
# PPM branch output
x1 = self.conv2_5(F.relu_(x2_1 + x2_2 + x2_3))
# MPM output
x2 = self.conv2_6(F.relu_(x2_5 + x2_4))
out = self.conv3(torch.cat([x1, x2], dim=1))
return F.relu_(x + out)