首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
Halcon 第八章『相机标定与三维重建』◆第1节:线性代数和矩阵
企业开发
2022-07-01 23:15:01
阅读次数: 0
一、行列式介绍
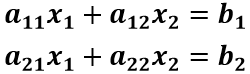
1、解方程组,标准的二元一次方程组
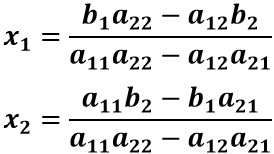
当
时,求得方程组的解为:
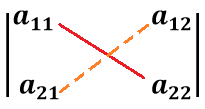
2、引入行列式概念
上述二阶行列式的定义,可以用对角线法则来记忆。
把
到
的实联线称为主对角线,
猜你喜欢
转载自
blog.csdn.net/qq_45336030/article/details/125436538
Halcon 第八章『相机标定与三维重建』◆第1节:线性代数和矩阵
Halcon 第八章『相机标定与三维重建』◆第3节:相机标定原理
Halcon 第八章『相机标定与三维重建』◆第4节:标定板介绍
Halcon 第八章『相机标定与三维重建』◆第2节:立体视觉的基础
Halcon 第八章『相机标定与三维重建』◆第5节:使用助手进行标定的步骤
Halcon 第八章『相机标定与三维重建』◆第7节:set_origin_pose变换的原因以及图像变换
Halcon 第八章『相机标定与三维重建』◆第6节:set_origin_pose算子的计算原理
Halcon 第八章『相机标定与三维重构』◆第7节:set_origin_pose变换的原因以及图像变换
halcon标定
halcon 相机标定
Halcon 单相机标定
Halcon 3D 三维重建
HALCON双目三维重建实验
Halcon标定与自标定
Halcon标定板标定
halcon和halcon XL适用的图像尺寸
Halcon标定步骤
halcon自标定
halcon 九点标定
halcon 相机外触发
Halcon相机标定程序注释
Halcon之单相机的标定
Halcon相机标定及畸变矫正
halcon一维测量
Halcon 2 维测量
halcon常用算子(1)
HALCON学习笔记1
HALCON算子1
Halcon 记录1
HALCON学习笔记 1
今日推荐
技术解析 GPT-4o:即时语音交互的突破与 GenAI 发展策略
开源大模型与闭源大模型
微信小程序授权登录获取用户的openid
亿级流量系统架构设计与实战
人工智能时代的程序设计教学与课程设计
纽交所技术问题致伯克希尔 (BRK.A) 显示跌近 100%
探索 api.maynor1024.live:一站式 AI 服务平台
AI一键去衣技术:窥见深度学习在图像处理领域的革命(最后有彩蛋)
艾体宝案例 | 使用Redis和Spring Ai构建rag应用程序
Apple M1 vs 高通8Gen2 vs Apple A12Z各方面比较
【升职加薪必备架构图】Springboot学习路线汇总_springboot四层架构流程图
与Apollo共创生态:Apollo7周年大会自动驾驶生态利剑出鞘
周排行
面试爱奇艺,竟然挂在第5轮……
scala方法和函数的区别
NYIST--2018大一新生第一次周赛题解
java如何通过client客戶端http实现get/ post请求传递json参数到restful 服务接口
RabbitMQ 队列类型
2018-2019-1 20165311 20165329 20165334 实验一 开发环境的熟悉
iOS打包工具 配置相应的文件路径 一键打包到指定位置
【每日一题】替换空格
【转载】FPGA配置方式
旅行青蛙
每日归档
更多
2024-06-03(52)
2024-06-02(4)
2024-06-01(60)
2024-05-31(47)
2024-05-30(4)
2024-05-29(65)
2024-05-28(2)
2024-05-27(56)
2024-05-26(6)
2024-05-25(68)