智能机器人已经日益成为各种生产中不可或缺的主体,通过系统集成,可以使它以其灵活高效的特性组成各种各样的应用系统,提高了生产率,增强了柔性,适应了当今的发展趋势。
《智能机器人时代的自动化与系统集成》
机器人作业系统是以机器人作为加工和服务主体的作业系统,机器人只是整个作业系统的一部分,要全部进行系统集成使之构成一个有机整体,才能完成任务,满足工作需求。传统系统集成方法的局限并未能充分发挥智能机器人的优势,导致机器人系统的专用性增强,因此突破传统系统集成方法,建立新的机器人作业系统具有十分重要的意义。
针对智能机器人自动化和系统集成技术的探讨,NOKOV度量动作捕捉特邀其日本客户–日本大阪大学基础工学院长聘副教授,大阪大学共生智能系统研究中心研究员万伟伟老师,联合机器人大讲堂,分享相关知识。
本期分享要点如下
智能机器人规划与控制系统介绍
基于WRS系统的机器人快速集成方法
基于WRS系统的机器人快速集成应用
以下内容根据万伟伟教授直播分享实录整理
01智能机器人规划与控制系统介绍
传统机器人系统集成方法主要有示教板、力牵引以及虚拟空间仿真环境,这些方法会存在以下问题:一是无法适用于不同机械臂硬件设备;二是无法应用于变种变量的生产环境。
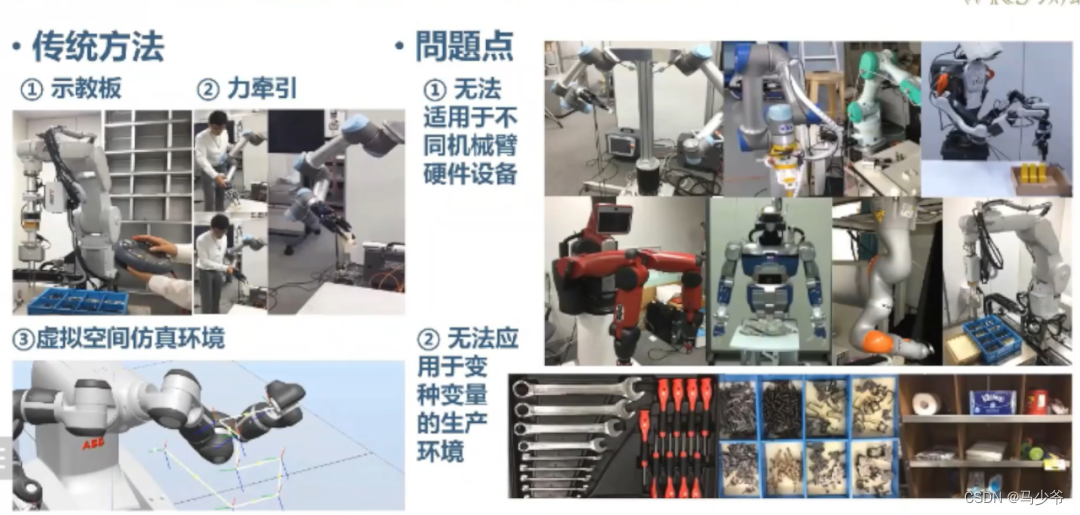
近年来,对传统集成方法的弊端,有人提出了一些解决方案,进而出现了一些新兴的创业企业,其技术基础在于视觉识别和运动规划,主要用于解决拿放、组装、搬运、加工、装配等问题,需要包括力传感器在内的多种传感器的合作来实现。

基于现有技术和已有开发经验的基础上,实验室考虑了以下框架用于机器人系统集成:
- 与机器人完全分离的教学
- 视觉识别与任务和动作的同时规划,使用强化学习解决传统方法难解决的搜索和优化问题
- 多模态传感器反馈,错误辨识和恢复,通过各种传感器的柔和调整误差,提高系统的鲁棒性
基于上述几种框架,该实验室自2016年起开发了一套开源软件系统——WRS,该软件基于ROS、RTM、Choreonoid、OpenRAVE开发,与ROS类似,也考虑了URDF的定义结构的通用性等特点,包含自主研发的规划、控制、通信及视觉等模块,其特征在于完全开源以及不断更新迭代、创新中。
02基于WRS系统的机器人快速集成方法
如何理解机器人系统的开发流程?通过一个WRS系统开发的案例来进行说。
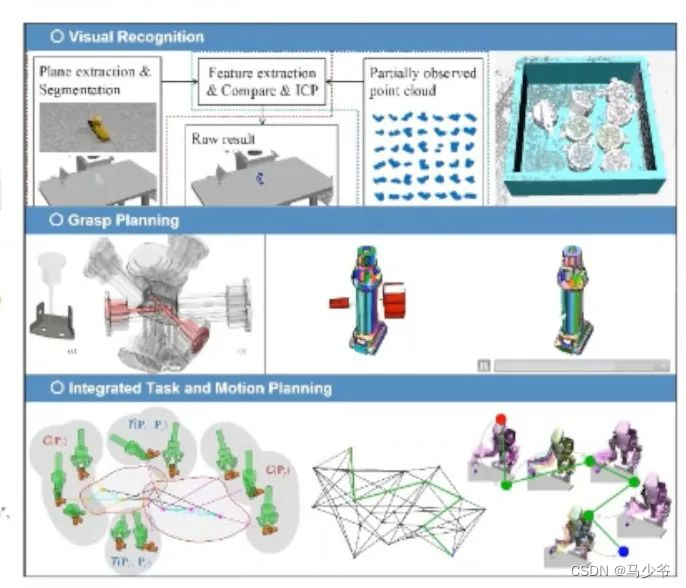
以代替工作台前工作的工人的机器人为例,其开发流程大致分为以下三步:1、视觉识别,用于识别物体位置和姿态,目前已有较多库函数;2、抓取规划,可以对物体表面曲率、粗糙度、弯折以及机械手可能的碰撞等进行计算,使机械手以一个较合理的姿态去抓取;3、集成任务和动作规划,其核心在于最优化其动作,达到只需下达一个指令后面就不需要操作的效果。
通过以上方法就可以由人的“教学”结果端对端到机器人的作业动作,解决机器人不能通用、变种变量生产等问题。在这种开发模式下,不用人来设计机器人动作,机器人就可以自己“决定”怎么做动作,甚至可以做到无力传感器控制情况下的对孔等装配操作,比如利用几何约束避免力控的方法,从而避免对机构以及传感器的破坏。
03基于WRS系统的机器人快速集成应用
我们可以从以下一些实例来了解基于WRS系统下的机器人快速集成方法的应用。
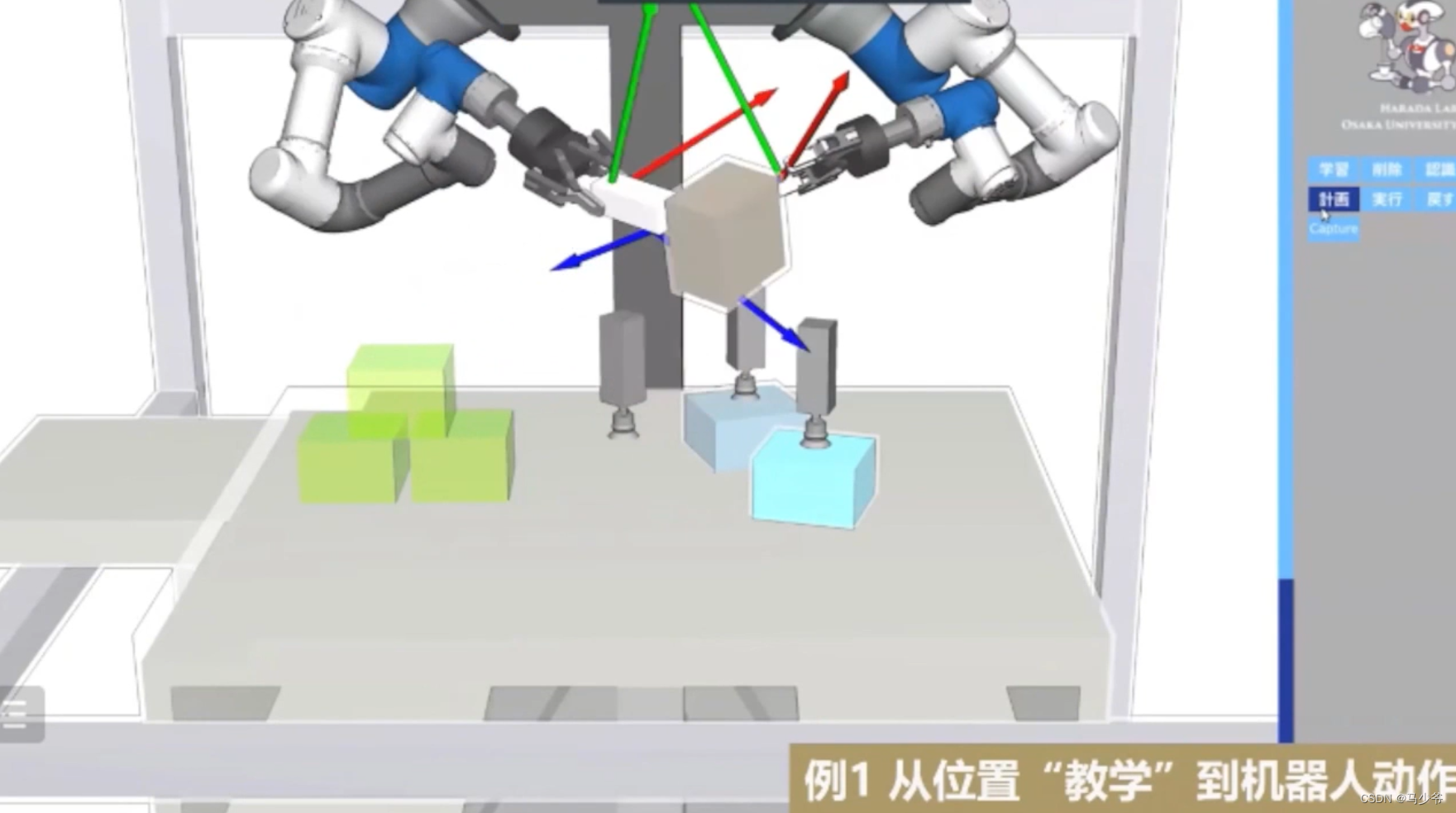
1、从位置“教学”到机器人动作。可以通过人手动堆放几个物体,为机器人设定目标,然后机器人就可以根据该目标,自动设计动作并及时进行反馈和修正,最终达到相同的堆放效果。
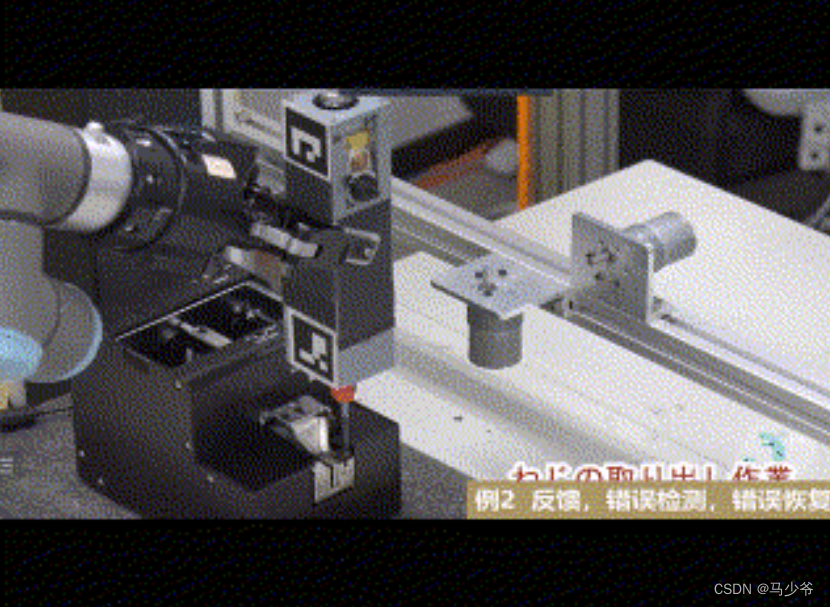
2、反馈、错误检测和错误恢复。例如给机器人指定拧螺钉位置让它自动工作,机器人可自主设计出动作以用于后续工业化生产。
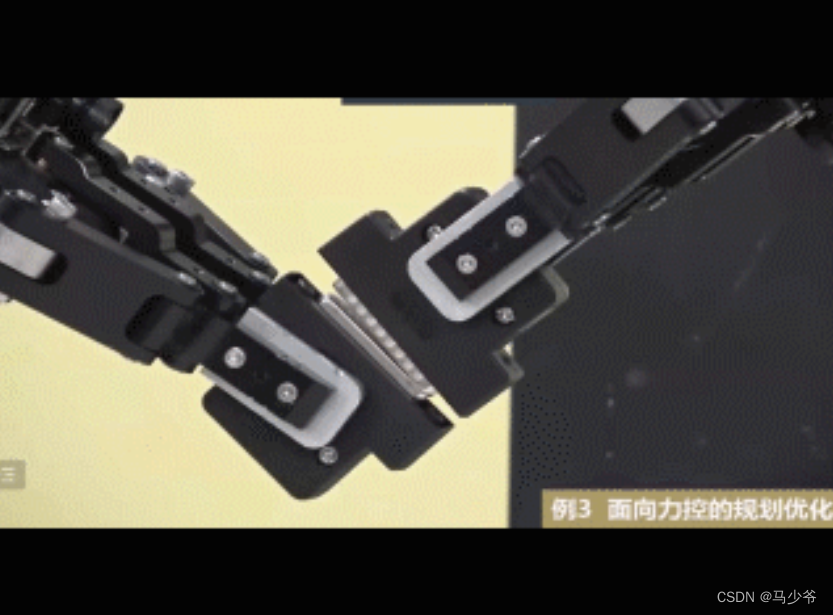
3、面向力控的规划优化。可通过力反馈进行有效的插入装配动作。
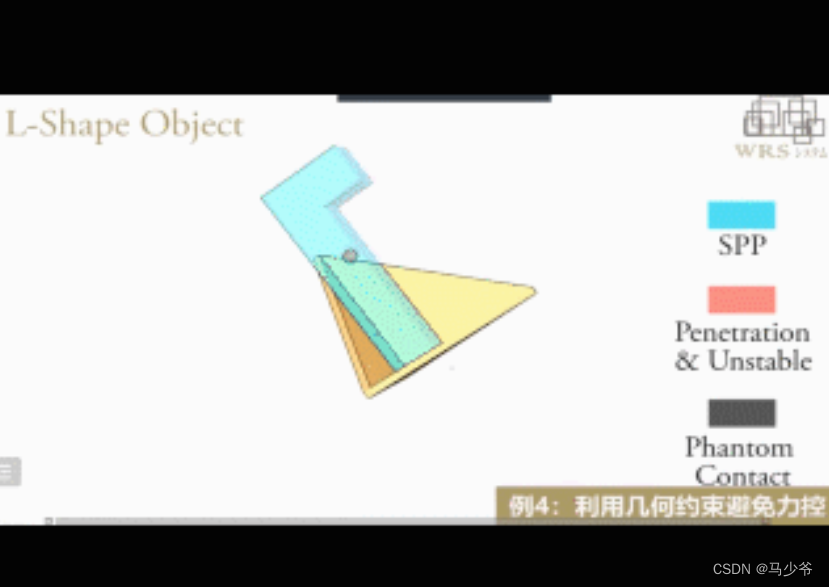
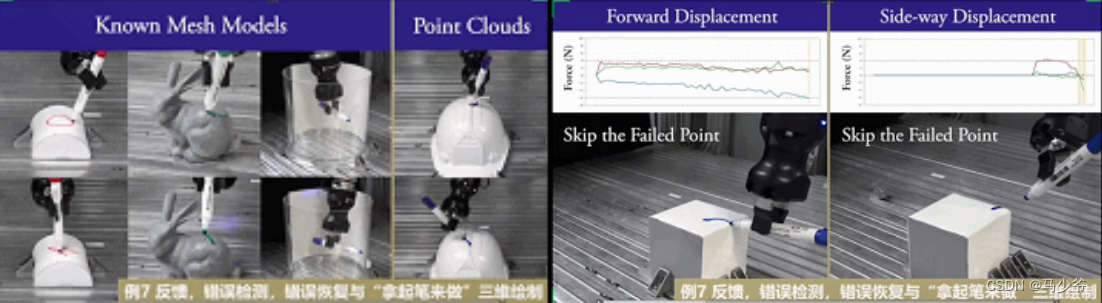
4、利用几何约束避免力控。利用力控可能会造成一定的工件损伤,对于表面要求比较高的精密设备装配,这个时候可能使用视觉反馈办法更加合适。几何约束方法可以方便地使机器人获得物体准确几何位置,可在不使用力反馈情况下使用较为简便地视觉检测方法高效实现定位装配。
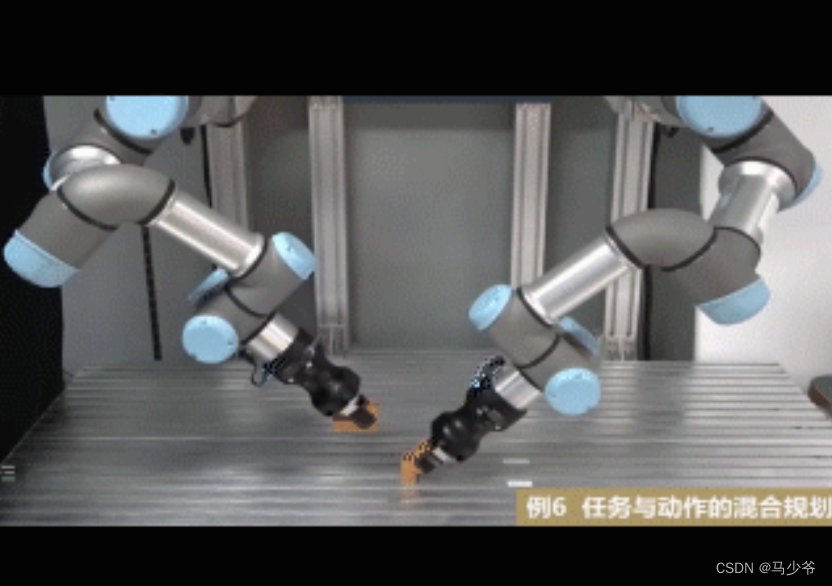
5、任务与动作的混合规划。以一个堆积木地作业为例,机器人可以在堆的过程中,进行手扶保持的操作,以维持组装不坍塌。
6、为机器人设计工具。为了提高机器人通用性,对于机器人的末端执行器,需尽量减少更换,这样,为了实现不同工作任务下的精细操作,万老师他们实验室设计了和固定的机械手匹配的各种专用工具,例如下图中,机器人两只手分别持有吸盘和夹具,可进行多种多样的操作。
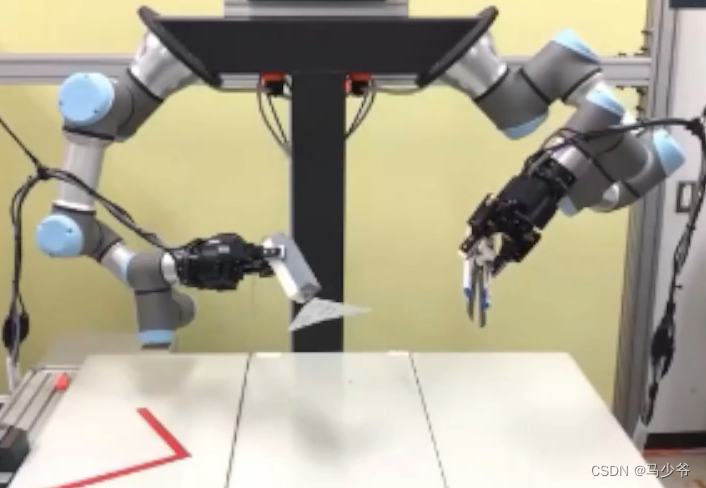
另外,还设计有将机器人机械手横向按压运动转化为转动的工具装置,这样可以在不添加其他用电设备的情况下轻松进行拧螺钉等操作。

7、通过反馈和错误检测进行三维作图,这样可以在建筑物或者其他表面不是完全平面的物体表面进行作画。
8、通过识别、规划、力控等完成和人类一样复杂的工作。例如采用滑轮组和绳索将石板翻面的操作。

9、人机合作。机器人做机器人擅长的,人做人擅长的,这样可以大大提高工作效率。

文章来源: leaderobot