一,中断:


二,IO方式:MIO EMIO GPIO

MIO分配在bank0和bank1直接与PS部分相连,EMIO分配在bank2和接和PL部分相连。除了bank1是22-bit之外,其他的bank都是32-bit。所以MIO有53个引脚可供我们使用,而EMIO有64个引脚可供我们使用。
使用EMIO的好处就,当MIO不够用时,PS可以通过驱动EMIO控制PL部分的引脚,接下来就来详细介绍下EMIO的使用。
EMIO的使用和MIO的使用其实是非常相似的。区别在于,EMIO的使用相当于,是一个PS + PL的结合使用的例子。所以,EMIO需要分配引脚,以及编译综合生成bit文件。
1 MIO与EMIO概念
MIO:多功能IO接口,属于Zynq的PS部分,在芯片外部有54个引脚。这些引脚可以用在GPIO、SPI、UART、TIMER、Ethernet、USB等功能上,每个引脚都同时具有多种功能,故叫多功能。
EMIO:扩展MIO,依然属于Zynq的PS部分,只是连接到了PL上,再从PL的引脚连到芯片外面实现数据输入输出。
2 MIO与EMIO的使用例程(双串口、双网口等的实现)
以双串口为例:
实现功能:
① 实现数据直接从PS的MIO口接收与发送
② 通过PL口实现数据的接收与发送
③ 实现数据的双串口接收与发送(即PS可同时从两个UART口接收或发送数据)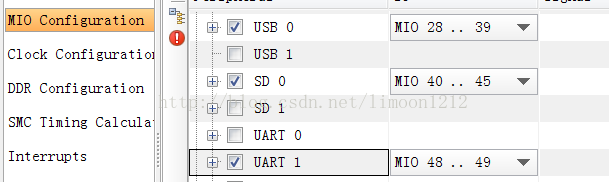
例如:https://blog.csdn.net/wangjie36/article/details/104765783
三,BRAM或FIFO或EMIF
1,通过BRAM实现PL/PS之间交互







2,通过AXI-Stream FIFO完成PS和PL部分的数据交互
S_AXI,PS读写FIFO数据接口;AXI_STR_TXC,发送控制端口;AXI_STR_TXD,发送数据端口;AXI_STR_RXD,接收数据端口
AXI DATA FIFO,读接口AXI4-FILL,写接口AXI4-FULL。
AXI-Stream FIFO,读接口PS AXI4-LITTLE,写接口PL AXI4-LITTLE。

使用AXI-Stream FIFO,FCLK_CLK0使用100MHz时,有警告。50MHz,125MHz没有发现警告

3,通过 EMIF 进行 PS 与 PL 间数据交互



四,AXI DMA:PS通过AXI-lite向AXI DMA发送指令,AXI DMA通过HP通路和DDR交换数据,PL通过AXI-S读写DMA的数据。
此处详细讲,很多内容敬请期待一步步更新:
首先PS通过AXI-lite配置DMA的工作模式,然后,PS将数据写入DDR,再然后,PS控制DMA读出之前写入的数据,将数据流写入FIFO(读完后DMA会向PS发送中断),再然后,PS控制DMA将FIFO的数据流再通过AXI总线写回DDR(写完后DMA会向PS发送中断),PS判断写入的数据和读出的数据是否一致。


Tries为测试次数,TxBufferPtr的地址为DMA发送的数据到设备的地址,RxBufferPtr地址则是设备发给DMA的存储地址,MAX_PKT_LEN为一次测试的测试长度,数据从0x55开始递增。
一次测试的过程:
PS的 for 循环产生数据—>PS的数据写入DDR—>PS配置DMA接收通道—>PS配置DMA发送通道(数据开始发送)—>发送的数据经过FIFO回到DMA—>DMA中断到达后观察数据—>进行下一次测试
五,DDR3:通过对AXI HP接口的操作来实现。
PL实现AXI4接口,通过S AXI HP接口读取ps侧DDR3数据. 例程功能:PL,PS向指定地址写数据,对方来读。
AXI-DMA:实现从PS内存到PL高速传输高速通道AXI-HP<---->AXI-Stream的转换
AXI-Datamover:实现从PS内存到PL高速传输高速通道AXI-HP<---->AXI-Stream的转换,完全由PL控制的,PS是完全被动的。
AXI-VDMA:实现从PS内存到PL高速传输高速通道AXI-HP<---->AXI-Stream的转换,是专门针对视频、图像等二维数据的。
AXI-CDMA IP: 这个是由PL完成的将数据从内存的一个位置搬移到另一个位置,无需CPU来插手。和Stream没有关系。
六,AXI_HP总线:只能单向传输,从PL到PS端,适用于大数据传输。
1,无DMA的HP总线:https://blog.csdn.net/wangjie36/article/details/119297947
2,使用DMA的HP总线:https://blog.csdn.net/wangjie36/article/details/119110701
七,AXI_GP总线:可以从PS到PL传输,也可以PL到PS传输,适用于数据量不大的数据传输。
https://blog.csdn.net/wangjie36/article/details/115486926
八,内部回环串口
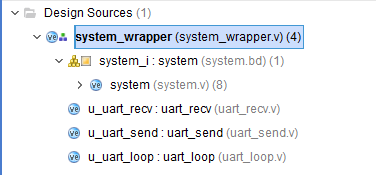
module system_wrapper
(
//uart_rtl_0_rxd,
//uart_rtl_0_txd,
uart_rtl_1_rxd,
uart_rtl_1_txd,
sys_clk,
sys_rst_n);
//input uart_rtl_0_rxd;
//output uart_rtl_0_txd;
input uart_rtl_1_rxd;
output uart_rtl_1_txd;
input sys_rst_n;
input sys_clk;
wire [7:0]gpio_rtl_0_tri_o;
wire uart_rtl_0_rxd;
wire uart_rtl_0_txd;
wire uart_rtl_1_rxd;
wire uart_rtl_1_txd;
system system_i
(
.uart_rtl_0_rxd(uart_rtl_0_rxd),
.uart_rtl_0_txd(uart_rtl_0_txd),
.uart_rtl_1_rxd(uart_rtl_1_rxd),
.uart_rtl_1_txd(uart_rtl_1_txd));
//parameter define
parameter CLK_FREQ = 100000000; //定义系统时钟频率
parameter UART_BPS = 115200; //定义串口波特率
//wire define
wire uart_recv_done; //UART接收完成
wire [7:0] uart_recv_data; //UART接收数据
wire uart_send_en; //UART发送使能
wire [7:0] uart_send_data; //UART发送数据
wire uart_tx_busy; //UART发送忙状态标志
//*****************************************************
//** main code
//*****************************************************
// assign uart_rxd=uart_rtl_0_txd;
// assign uart_txd=uart_rtl_0_rxd;
//串口接收模块
uart_recv #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口接收波特率
u_uart_recv(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_rxd (uart_rtl_0_txd),//uart_rtl_0_txd
.uart_done (uart_recv_done),
.uart_data (uart_recv_data)
);
//串口发送模块
uart_send #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口发送波特率
u_uart_send(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_en (uart_send_en),
.uart_din (uart_send_data),
.uart_tx_busy (uart_tx_busy),
.uart_txd (uart_rtl_0_rxd )//uart_rtl_0_rxd
);
//串口环回模块
uart_loop u_uart_loop(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.recv_done (uart_recv_done), //接收一帧数据完成标志信号
.recv_data (uart_recv_data), //接收的数据
.tx_busy (uart_tx_busy), //发送忙状态标志
.send_en (uart_send_en), //发送使能信号
.send_data (uart_send_data) //待发送数据
);
endmodule
九,AXI4转各种接口:比如转IIC,转SPI等等
https://blog.csdn.net/wangjie36/article/details/119224642
十,其它自定义IP