ROS可视化工具Rviz&显示电脑摄像头的视频
概要
安装Rviz,并利用它显示电脑摄像头的视频。
一、认识Rviz
RViz是ROS的三维可视化工具。它的主要目的是以三维方式显示ROS消息,可以将 数据进行可视化表达。例如,可以无需编程就能表达激光测距仪(LRF)传感器中的传感 器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等。

rviz : The ROS Visualization Tool ,即
机器人操作系统3D可视化工具。它的作用就是:一个虚拟世界,用来模拟机器人在现实世界的运行效果。
简单的说它就是ROS的一个模拟器软件。
二、安装Rviz
1、前期准备
找到虚拟机设置

单击USB控制器,将USB兼容性改为USB2.0

连接摄像头

查看是否可以正常使用
cheese#使用该命令会调用摄像头,同时会弹出一个界面显示摄像头的画面
#默认cheese应该是没有按照的,需要执行下面命令
sudo apt-get install cheese

2、安装
从源文件编译
首先下载
rosdep install rviz
编译
rosmake rviz

启动
运行下面命令
roscore
rosrun rviz rviz

也可以直接运行如下命令,效果一样
roscore
rviz
打开界面如下

3、界面简单介绍
界面整体

区域划分介绍

➊ 3D视图(3D view): 指屏幕的黑色部分。它是可以用三维方式查看各种数据的主屏幕。3D视图的背景颜 色、固定框架、网格等可以在左侧显示的全局选项(Global Options)和网格(Grid)项目中进行详细 设置。
➋ 显示屏(Displays): 左侧的显示屏是从各种话题当中选择用户所需的数据的视图的区域。如果单击屏幕4 左下方的[Add],选择屏幕将如图6-7所示。目前有大约30种不同的显示屏可供选择,我们将在下面的描述 中详细介绍。
➌ 菜单(Menu): 菜单位于顶部。用户可以选择保存或读取显示屏状态的命令,还可以选择各种面板。
➍ 工具(Tools): 工具是位于菜单下方的按钮,允许用户用各种功能按键选择多种功能的工具,例如 Interact、Move Camera、Select,Focus Camera、Measure、2D Pose Estimate、2D Navigation Goal 以及Publish Point等。
➎ 视图(Views): 设定三维视图的视点
■ Orbit:以指定的视点(在这里称为Focus)为中心旋转。这是默认情况下最常用的基本视图。
■ FPS(第一人称):显示第一人称视点所看到的画面。
■ ThirdPersonFollower:显示以第三人称的视点尾追特定目标的视图。
■ TopDownOrtho:这是Z轴的视图,与其他视图不同,以直射视图显示,而非透视法。
■ XYOrbit:类似于Orbit的默认值,但焦点固定在Z轴值为0的XY平面上。
➏ 时间(Time): 显示当前时刻(wall time)、ROS Time以及他们各自经过的时间。这主要用于仿真,如 果需要重新启动,请点击底部的[Reset]按钮。
显示屏的选择画面

最上面是display的类型。最下面是名称,必须是独一无二的。
显示自己属性

Status共有四种状态:OK,Warning,Error和Disable。 不同的状态,扩展内容里面会有说明。
使用RViz的过程中最常用的菜单应该是显示屏5菜单。该显示屏菜单用于选择三维视 图(3D View)画面所显示的信息


三、摄像头视频显示
1、安装相关功能包
安装uvc camera功能包
sudo apt-get install ros-melodic-uvc-camera

安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view


2、相关启动
启动Ros的核心程序
roscore

在另外的终端运行uvc_camera节点
rosrun uvc_camera uvc_camera_node
打开另外一个终端,查看话题消息
rostopic list

打印相机信息
rostopic echo /camera_info

3、Rviz配置
打开rviz
rviz

找到选项卡左下角的Add并点击

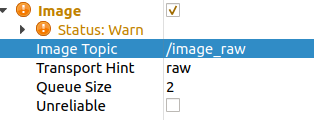
找到By display type下的Image,点击选择,然后点击OK添加

将image Topic的值更改为/image_raw
结果显示

如果无法打开摄像头,可以选择更改USB,然后再重新跑指令。
四、总结与参考资料
1、总结
本篇文章主要是对ROS可视化工具Rviz的简单介绍与使用,rviz算是一个3D模拟器,就相当于将生活中的事物在3D模型中显现。
2、参考资料
RViz学习笔记(一) - 安装
ROS学习(七):三维可视化工具(RViz).
ROS查询笔记本摄像头参数,利用rviz显示实时视频.