引子
本文将分析《手把手教你看懂并理解Arduino PID控制库》中第四个问题:突然开启或者关闭PID控制对系统的影响。
问题定义
先看问题的图示:
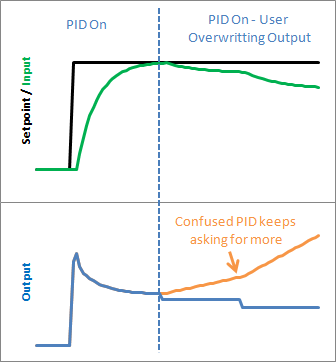
图中,蓝色的竖虚线表示在时间轴上,PID控制由开启状态转为关闭的状态。如果我们对于关闭PID采取的操作是强制设定输出为“PID由开启转关闭对应的输出值或更小或为0”。由于输出被设为定值,由于输出的“力度”不够,那么被控量会缓慢减少。但对于PID控制器来说,他会不知道PID已经关闭了,由于被控量见笑了,他就会努力增加输出,以求改变这种态势。但现实是残酷的,为何我“放肆”增加输出,被控量却没有按照我设定的方向发展。此时,若突然又将PID打开了,将会有一个极大的输出对系统作用,稳定性降低。
解决方案
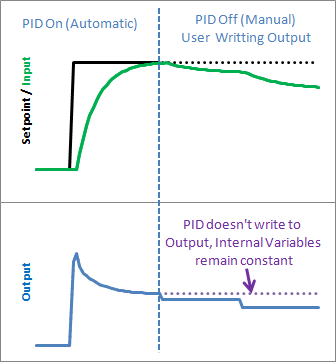
上述问题,并不是一个大问题,其实在关闭PID控制的时候,仅需要退出PID计算循环,让各控制参量仍保持原样即可。if(!inAuto) return; 和 setMode函数完成了上述功能。
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
double outMin, outMax;
bool inAuto = false;
#define MANUAL 0
#define AUTOMATIC 1
void Compute()
{
if(!inAuto) return;
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
{
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
}
}
void SetTunings(double Kp, double Ki, double Kd)
{
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
}
void SetSampleTime(int NewSampleTime)
{
if (NewSampleTime > 0)
{
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
}
}
void SetOutputLimits(double Min, double Max)
{
if(Min > Max) return;
outMin = Min;
outMax = Max;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
}
void SetMode(int Mode)
{
inAuto = (Mode == AUTOMATIC);
}结论
NOTE:如有不足之处请告知。^.^
下一章将介绍如果在系统运行过程中,突然改变PID控制参数对系统的影响
PS:转载请注明出处:欧阳天华