0. 写在最前面
因为日常看代码经常能看到tf相关的一些函数,转来转去,绕得很晕,有不懂的就仔细查一下,将自己的理解整理出来,这篇是关于 tf::MessageFilter的。
message_filters,顾名思义是消息过滤器;tf::MessageFilter,顾名思义是tf下的消息过滤器。消息过滤器为什么要用tf呢?tf::MessageFilter可以订阅任何的ROS消息,然后将其缓存,直到这些消息可以转换到目标坐标系,然后进行相应的处理(一般在回调函数中处理)。说白了就是消息订阅+坐标转换。实际上,后者继承于前者: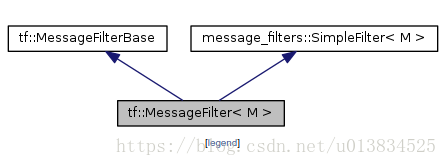
示例一(amcl中激光雷达的回调):
tf_ = new TransformListenerWrapper();
message_filters::Subscriber<sensor_msgs::LaserScan>* laser_scan_sub_;
tf::MessageFilter<sensor_msgs::LaserScan>* laser_scan_filter_;
laser_scan_sub_ = new message_filters::Subscriber<sensor_msgs::LaserScan>(nh_, scan_topic_, 100);
laser_scan_filter_ = new tf::MessageFilter<sensor_msgs::LaserScan>(*laser_scan_sub_,
*tf_,
odom_frame_id_,
100);
laser_scan_filter_->registerCallback(boost::bind(&AmclNode::laserReceived, this, _1));
void AmclNode::laserReceived(const sensor_msgs::LaserScanConstPtr& laser_scan){
this->tf_->transformPose(base_frame_id_, ident, laser_pose);//这个函数的意思是,ident在base_frame_id下的表示为laser_pose
}
示例二(leg_detector中激光雷达的回调):
TransformListener tfl_;
message_filters::Subscriber<sensor_msgs::LaserScan> laser_sub_;
tf::MessageFilter<sensor_msgs::LaserScan> laser_notifier_;
laser_sub_(nh_, "scan", 10)
laser_notifier_(laser_sub_, tfl_, fixed_frame, 10)
laser_notifier_.registerCallback(boost::bind(&LegDetector::laserCallback, this, _1))
laser_notifier_.setTolerance(ros::Duration(0.01));
void laserCallback(const sensor_msgs::LaserScan::ConstPtr& scan){
tfl_.transformPoint(fixed_frame, loc, loc);
}
示例三(参考一中的示例):
class PoseDrawer
{
public:
PoseDrawer() : tf_(), target_frame_("turtle1")
{
point_sub_.subscribe(n_, "turtle_point_stamped", 10);
tf_filter_ = new tf::MessageFilter<geometry_msgs::PointStamped>(point_sub_, tf_, target_frame_, 10);
tf_filter_->registerCallback( boost::bind(&PoseDrawer::msgCallback, this, _1) );
} ;
private:
message_filters::Subscriber<geometry_msgs::PointStamped> point_sub_;
tf::TransformListener tf_;
tf::MessageFilter<geometry_msgs::PointStamped> * tf_filter_;
ros::NodeHandle n_;
std::string target_frame_;
// Callback to register with tf::MessageFilter to be called when transforms are available
void msgCallback(const boost::shared_ptr<const geometry_msgs::PointStamped>& point_ptr)
{
geometry_msgs::PointStamped point_out;
try
{
tf_.transformPoint(target_frame_, *point_ptr, point_out);
}
catch (tf::TransformException &ex)
{
printf ("Failure %s\n", ex.what()); //Print exception which was caught
}
};
};
int main(int argc, char ** argv)
{
ros::init(argc, argv, "pose_drawer"); //Init ROS
PoseDrawer pd; //Construct class
ros::spin(); // Run until interupted
};
以上的程序都需要添加以下头文件:
#include "ros/ros.h" #include "tf/transform_listener.h" #include "tf/message_filter.h" #include "message_filters/subscriber.h"可以看到示例一、二、三结构都是差不多:
- 定义数据:TransformListener、message_filters::Subscriber、tf::MessageFilter
- 用消息的名称来初始化message_filters::Subscriber
- 用tf、message_filters::Subscriber、目标坐标系来初始化tf::MessageFilter
- 给tf::MessageFilter注册callback。
- 编写callback,并在回调中完成坐标转换。至此完成消息订阅+坐标转换
在看message_filters的主页过程中发现,它可以做的远比以上说的多,比如:
An example is the time synchronizer, which takes in messages of different types from multiple sources, and outputs them only if it has received a message on each of those sources with the same timestamp.
有兴趣的自己可以看看。
参考:
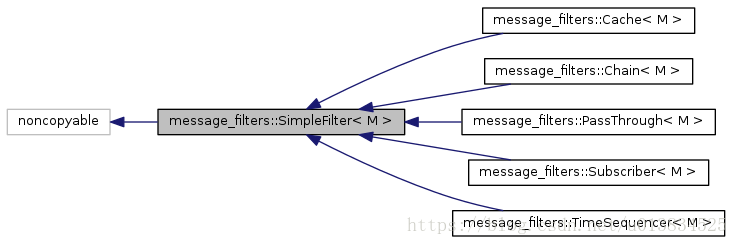
ROS官方message_filters::SimpleFilter文档