БЛА Обзор
Беспилотный летательный аппарат, называемый дронов, английский Unmaned Aerial Vehicle, Л. Другими слова, беспилотные летательный аппарат без какого-либо выражал водителя, полет самолета автоматически балансировать эффективное управление бортовой компьютерной системы, а также предварительно установить или самолет, летящий через автоматическую генерацию сложных маршрутов, и автоматически выполнять задачи, связанные и обработку исключений во время полета. ЛИ, как правило, делится на полностью офф-лайн самолеты и половину от самолета, самолет может быть полностью в автономном режиме полностью без взаимодействия с системой заземления, автозаполнение один или несколько миссий, а также вернуть или посадки в установленных местах после выполнения задания, половина Offline во время автоматизированных миссий воздушного судна наземных систем (наземные станции) управление инструкции, ручное вмешательство его миссия, и аварийная система Декрета перемалывает в чрезвычайных ситуациях, такие, как: возвращение, посадка, саморазрушению и так далее. Можно сказать, что БПЛА может завершить миссию без водителя бортовой компьютер систем воздушных судов и наземных систем в сочетании друг с другом. С точки зрения может быть полностью из-под контроля управления в реальном времени земли, которая состоит из планера, систем питания, самобалансирующейся систем, навигационных систем, систем планирования маршрута, системы восприятия, системы исполнения миссии, наземных станций и систем связи. С использованием точки зрения, беспилотные летательные аппараты в основном используются в военных целях или специальной гражданской.
В последние годы, в связи с непрерывным развитием с открытым исходным кодом беспилотного летательного аппарата управления полетом и автопилотом, технология стала зрелой, десятки тысяч талантливых людей в мире свой код БЛА проект с открытым исходным кодом. Создание больше и больше обычных людей может легко выйти на поле. Как правило, ЛИ делятся на три категории: Самолеты , одновинтовые вертолеты , мульти-ротор вертолет . Ранее, самолеты и вертолеты теория доминирующий, мульти-ротор за последнее десятилетие созрела, сборка простое, гибкое переопределение, постепенно стал фаворитом Л.
Самолеты
Положитесь двигательной система (передний или задний тянущий винт винта), чтобы генерировать импульс движения вперед, так, чтобы самолет быстрой перемотки вперед. Когда воздушное судно вперед, скорость достигается потоком воздуха в воздушное судно размах крыльев (принцип Бернулли) генерируется повышенное напряжение, когда напряжение больше, чем силы тяжести фюзеляжа, воздушное судно находится в полете поднимается. Крыло летает (рулон) о главном крыла балансировки полагается, чтобы отрегулировать размер угла стреловидности, продольный (основной тон) балансовый руля полагается угол стреловидности регулируется, направление (товарное) зависят от вертикального руля регулируется, конечно, фиксированное самолеты заголовок обычно полагаются на сочетание разбега и движения основного тона, чтобы закончить, это не наши основные направления исследований, а не повторять их здесь.
Преимущества: долгий срок службы, высокая скорость.
Недостатки: ВПП, не может взлетать и садиться вертикально.

Одновинтовой вертолет
Именуется одновинтовой вертолета вертолета. Мы говорим здесь одного ротора и многократным ротора в механической конструкции, теории управления, теории полета существенно отличаются, пожалуйста, не запутать читателя. Одновинтовой вертолет (далее по тексту в качестве вертолета) система первичной мощности имеет только один большой воздушный винт, главная роль заключается в обеспечении восходящего полета импульса, поэтому, когда возрастающая сила тяжести больше, чем фюзеляж, воздушное судно находится на подъеме. И потому, что существует только одна активная сила вертолет пропеллера, когда движущая сила двигателя вращается с высокой скоростью, вращение тела пропеллера будет производить противодействующую силу - анти-крутящий момент. Под действием анти-крутящий момент, самолет будет иметь противоположное направление вращения гребных спинов. Для решения спины вертолета, необходимо добавить горизонтальный хвост небольшого пропеллера самолета, который производит в основном используется, чтобы вытащить тело противодействует спина, когда вертолет должен изменить курс, вы также можно регулировать с помощью хвостового ротора. В дополнение к активной силы электродвигателя и двигателя хвоста, как правило, есть три сервоприводы, активная сила для изменения высоты основного тона, крену и тангажу, генерируемого таким образом, что отношение тела, так что самолет вперед полета, или лететь в левый задний, правый полет.
Преимущество: VTOL, зависание.
Минусы: малое время автономной работы, сложная механическая структура, управление затруднено, медленный полет.

Multi-ротора вертолета
由三个、四个或更多螺旋桨所组成的无机。最典型、最常见的就是四旋翼直升机(以后简称四旋翼)。四旋翼有四个轴,安装四个螺旋桨,同样可以由螺旋桨的高速旋转产生向上的拉力实现垂直起降。但与直升机不同的是,多旋翼的前进、后退、向左、向右飞行靠的是四个螺旋桨不同的转速,而不是像直升机那样靠改变主动力桨的螺距,因为四旋翼桨的螺距是固定的,桨的尺寸也是固定的。四旋翼的四个轴的轴距通常也是相同的,所以其动力体系通常也是对称的。三旋翼、六旋翼、八旋翼或其它多旋翼除了将动力和力矩分配到多个螺旋桨的方案不同之外,与四旋翼没有本质上的区别。可以说,学习并掌握了四旋翼之后,也就可以举一反三的懂得了其它多旋翼的原理与动力系统。
优点:可以垂直起降,空中悬停,结构简单,操作灵活。
缺点:续航时间短,飞行速度慢。

四旋翼飞行器结构
四轴飞行器四个电机呈十字形排列, 驱动四片桨旋转产生向上的推力。四个电机轴距几何中心的距离相等, 当对角两个轴产生的升力相同时能够保证力矩的平衡, 四轴不会向任何一个方向倾转; 而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡, 保证了四轴航向的稳定。
与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
根据用户自定义的机头的位置不同,四轴飞行器可以分为x模式和+模式。x模式的机头方向位于两个电机之间,而+模式的机头方向位于某一个电机上。x和+就是表示正对机头方向时飞行器的形状。如下图所示。x模式要难飞一点,但动作更灵活。+模式要好飞一点,动作灵活差一点,所以适合初学者。特别注意,x模式和+模式的飞控安装是不同的。如果飞控板安装错误,会剧烈的晃动,根本无法飞。

空气动力原理
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。基本运动状态分别是:
- 垂直运动;
- 俯仰运动;
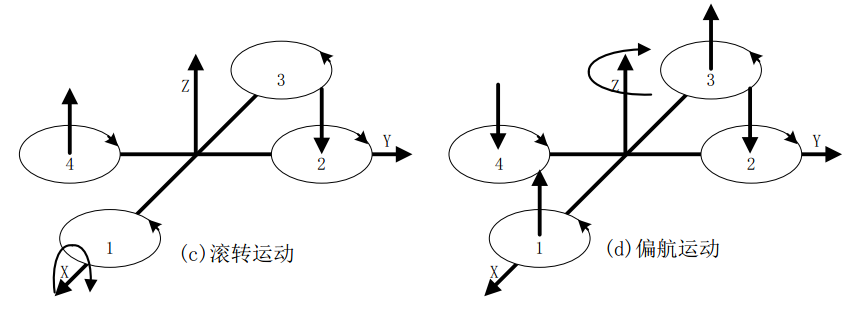
- 滚转运动;
- 偏航运动;
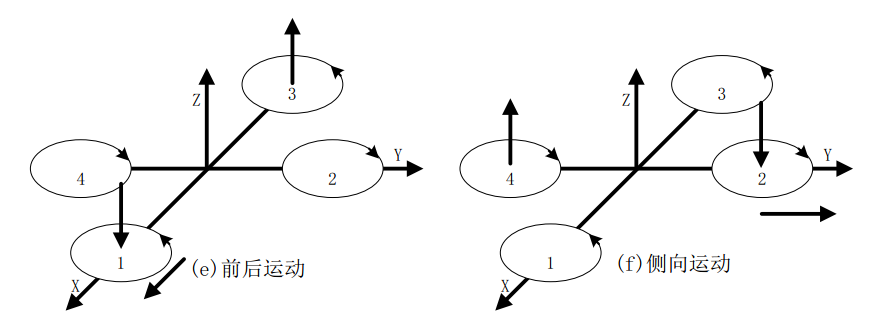
- 前后运动;
- 侧向运动。
在图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
垂直运动:垂直运动相对来说比较容易。在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
俯仰运动:在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。

滚转运动:与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
偏航运动:四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
倾向运动:在图f中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。
总得来说就是控制四个电机的速度了。然后相应的提高速度和减慢速度就可以让四轴动起来了。
参考:
https://www.zhihu.com/org/chen-yang-wu-ju-ke-ji/posts?page=2
http://bbs.eeworld.com.cn/thread-449222-1-1.html
https://blog.csdn.net/AASDSADAD/article/details/72872357