1. Введение
1 Фоновый анализ системы расписания движения автобусов.
Поскольку строительство городских транспортных объектов отстает от темпов роста спроса на движение, условия городского движения ухудшаются день ото дня. Транспортные заторы в различной степени возникают на основных транспортных развязках и некоторых дорогах с интенсивным движением Проблема стала узким местом, ограничивающим городское развитие.
Городская транспортная система - это открытая и сложная система, состоящая из городских дорожных сетей, транспортных средств и систем управления. Есть много способов решить проблему городского трафика. Например, текущие меры по ограничению количества пассажиров являются одним из лучших методов. Благодаря операции ограничения количества людей количество людей, которые ходят на автобусе пешком, увеличивается, поэтому как решить проблему с автобусом? планирование особенно необходимо. Разумное решение проблемы системы расписания общественного транспорта - сложная задача, которая требует учета сложных факторов, таких как люди, транспортные средства, дороги и т. Д. Следовательно, необходимо использовать высокотехнологичные технические методы для более эффективного решения проблем городского дорожного движения. В настоящее время интеллектуальные транспортные системы (ИТС) стали одним из важных способов решения этой проблемы.
Интеллектуальное планирование движения транспортных средств является одной из типичных проблем, которые необходимо решить при интеллектуальной диспетчеризации транспортных средств общественного транспорта. В контексте интеллектуальной транспортной системы (ИТС) составление расписания автобусов является основным содержанием городского общественного транспорта. диспетчеризация и ежедневное управление диспетчеризацией общественного транспорта. Важная основа для нормальной работы транспортных средств - это также основная основа для работы диспетчеров и водителей автобусов. Разумное расписание движения автобусов может помочь автобусным компаниям повысить эффективность использования транспортных средств, снизить эксплуатационные расходы и сократить время ожидания пассажиров для повышения качества обслуживания.
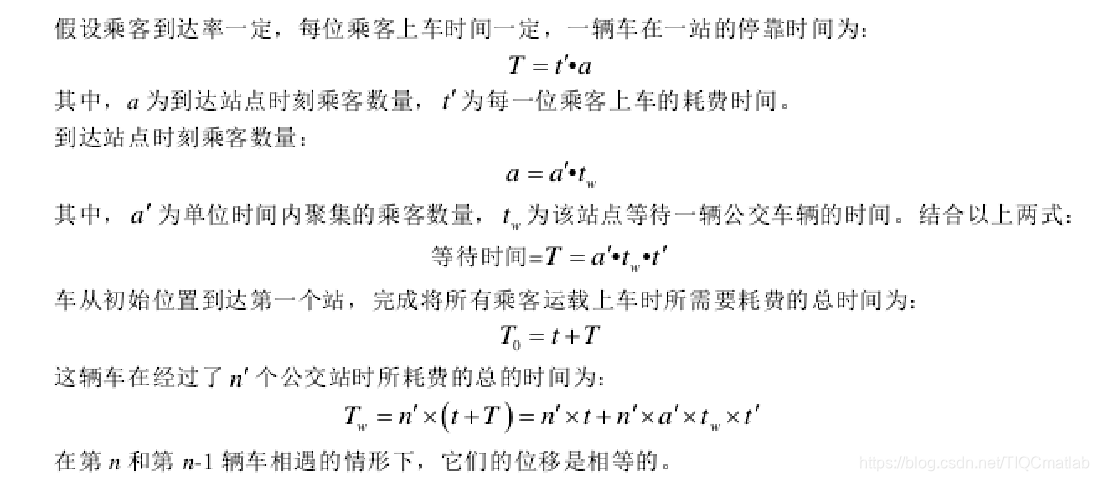
2 Модель вождения транспортного средства

3 Модель посадки и высадки пассажиров
4 Этапы применения
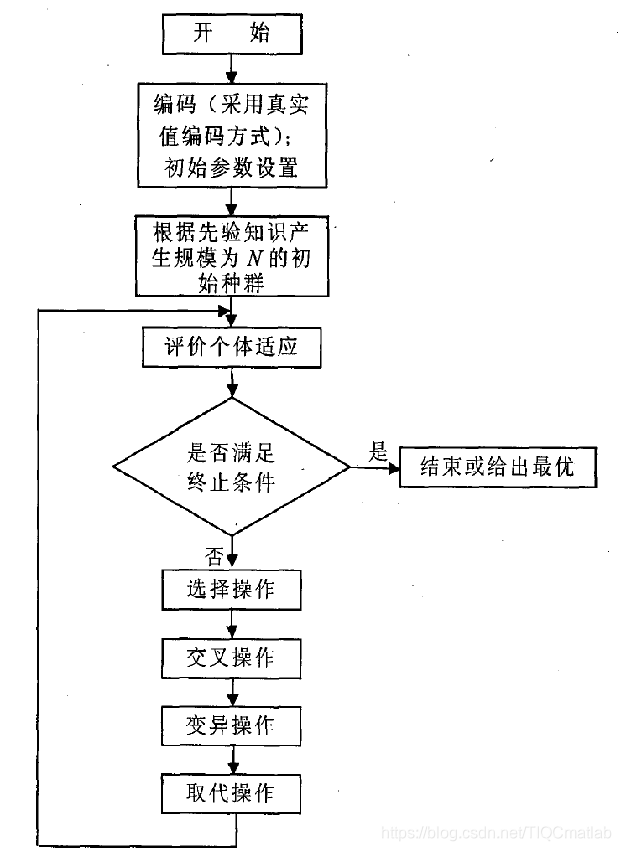
генетического алгоритма Генетический алгоритм GA - это метод глобальной оптимизации, основанный на эволюционной и генетической теории.
Основные шаги простого генетического алгоритма для решения проблемы заключаются в следующем:
(1) Инициализация: случайным образом сгенерировать N индивидуумов как начальную популяцию P (0), которая представляет собой набор возможных решений для целевой функции. Установите счетчик алгебры эволюции на ноль и установите максимальную алгебру эволюции iter_max;
(2) Индивидуальная оценка: подставьте начальную популяцию в целевую функцию и вычислите приспособленность каждой популяции в текущей популяции в соответствии с функцией приспособленности;
(3) Оценка условий завершения: учитывая условия завершения, определите, удовлетворяет ли алгоритм условиям завершения, и если да, перейдите к (8);
(4) Операция выбора: выполните операцию выбора на начальной группе, хорошие индивидуумы копируются в большом количестве и низкого качества.Люди редко копируются или даже удаляются;
(5) Расчет кроссовера: расчет кроссовера выполняется на основе вероятности кроссовера;
(6) Расчет мутаций: расчет кроссовера выполняется на основе вероятности мутации;
(7) Группа P (t) подвергается расчету отбора и расчету кроссовера. После операции мутации получается популяция следующего поколения P (t + 1), состоящая из N новых особей, затем перейдите к (2), в противном случае перейдите к (4);
(8) Непрерывная эволюция в конечном итоге получит целевую функцию, адаптацию. Индивидуум с наивысшей степенью выдается как оптимальное решение или удовлетворительное решение проблемы, и расчет прекращается.
Во-вторых, исходный код
% 产生t(i)序列
clc,clear,close all
warning off
Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
delta = 4; % 表示相邻车辆发车间隔之差的限制值
m = 500; % 表示总的发车次数(车次)
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
maxt = 960; % t(i)的最大值
% Loop
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
function flag=test(code)
% code output: 染色体的编码值
global Tmin Tmax delta
x=code; %先解码
flag=1;
for i=3:length(x)
else
flag=0;
end
end
% 产生t(i)序列
function ret=Mutation(pmutation,lenchrom,chrom,sizepop,num,maxgen)
% 本函数完成变异操作
% pcorss input : 变异概率
% lenchrom input : 染色体长度
% chrom input : 染色体群
% sizepop input : 种群规模
% opts input : 变异方法的选择
% pop input : 当前种群的进化代数和最大的进化代数信息
% bound input : 每个个体的上届和下届
% maxgen input :最大迭代次数
% num input : 当前迭代次数
% ret output : 变异后的染色体
function t = pop_meet_conditions(maxt)
global Tmin Tmax delta m tt PP Q cita
% 输入变量说明:
% Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
% Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
% delta = 4; % 表示相邻车辆发车间隔之差的限制值
% m = 500; % 表示总的发车次数(车次)
% maxt = 960; % t(i)的最大值
% 输出变量说明:
% t为满足条件的个体
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
flag = 1; % 标志变量
% Loop
while flag==1
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
end
Три, результаты бега




Четыре, примечания
Добавьте QQ1564658423 для полного кода или записи.
Предыдущий обзор >>>>>>
[ VRP] Задача маршрутизации транспортных средств на основе генетического алгоритма Matlab с временным окном [включая исходный код Matlab 002]
[Планирование пути] на основе алгоритма Matlab A * для решения задачи трехмерного планирования пути [включая исходный код Matlab код 003 период]
[путь] планирование на основе планирования пути Matlab искусственной пчелиной семьи с исходным кодом Matlab [004]
[путь] для решения планирования на основе задачи нескольких коммивояжеров Matlab муравьиной колонии [с исходным кодом Matlab MTSP 005]
[путь] планирование на основе на колонии муравьев Matlab Планирование пути БПЛА на основе алгоритма [включая исходный код Matlab 008]
[Планирование пути] Генетический алгоритм Matlab для решения нескольких проблем VRP [включая исходный код Matlab 010]
[Планирование пути] Многоцентровое решение VRP на основе генетического алгоритма Matlab [включая исходный код Matlab Проблема 011]
[Планирование пути] Трехмерное планирование пути БПЛА на основе роя частиц Matlab [Включая исходный код Matlab 015]
[ Планирование пути] На основе Matlab с использованием генетического алгоритма для компиляции проблемы маршрутизации открытого транспортного средства с множественной логистикой центры [Включая исходный код Matlab 017】
【Планирование пути】 Планирование пути сетки роботов на основе роя частиц Matlab 【Включите исходный код Matlab 018】
Планирование пути】 На основе алгоритма Matlab Ant Colony для поиска кратчайшего пути 【Включите исходный код Matlab 019】
【Планирование пути】 На основе иммунного алгоритма Matlab. Проблема местоположения логистического центра [Включить исходный код Matlab, период 020]
[Планирование пути] Трехмерное планирование пути БПЛА на основе искусственной пчелиной семьи Matlab [Включить исходный код Matlab, период 021]
[Планирование пути] Планирование оптимального пути робота на основе генетического алгоритма карты сетки Matalb [включая исходный код Matlab 022]
[Планирование пути] Планирование оптимального пути робота на основе генетического алгоритма сетки Matlab [включая исходный код Matlab 027 период]
[путь] планирование на основе Ant Colony Matlab Планирование атак нескольких БПЛА с исходным кодом Matlab [034]
[path] трехмерное планирование пути на основе источника Matlab для муравьиной колонии с планированием [043]
[path] планирование на основе Matlab частиц Оптимизация колонии муравьиной колонии решение кратчайшего пути [включая исходный код Matlab 076]
[Планирование пути] на основе алгоритма Matlab Ant Colony для решения многоцентровой проблемы VRP [включая исходный код Matlab 111]
[планирование пути] на основе алгоритма Matlab Ant Colony для решения с временными окнами. -центровая проблема VRP [Включая исходный код Matlab 112]
[Планирование пути] На основе алгоритма Matlab Ant Colony для решения многоцентровой проблемы VRP с временным окном [Включая исходный код Matlab 113]
[Планирование пути] Многоцентровое решение VRP на основе matalb генетический алгоритм [Содержит исходный код Matlab 114]
[Планирование пути] Matlab смоделировал отжиг для решения проблемы VRP [Содержит исходный код Matlab 115]
[Планирование пути] Планирование пути растра на основе звезды Matlab [Содержит исходный код Matlab 116]
[Планирование пути] На основе Matlab Планирование пути карты сетки роя частиц с двусторонней оптимизацией с перекрестными факторами [включая исходный код Matlab 117]
[TSP] На основе алгоритма Matlab Ant Colony для решения задачи TSP коммивояжера с графическим интерфейсом [включая исходный код Matlab 118]
[Путь планирование] на основе алгоритма Matlab, алгоритм колонии муравьев, планирование пути сетки [включая исходный код Matlab 119]
[TЗадача SP] Задача TSP, основанная на дифференциальной эволюции Matlab [включая исходный код Matlab 131]
[Планирование пути] Задача TSP коммивояжера на основе генетического алгоритма Matlab [включая исходный код 135 Matlab]
[планирование пути] Matlab смоделировал алгоритм отжига на основе задачи TSP коммивояжера [включая исходный код Matlab, период 136]
[Планирование пути] Интеллектуальное планирование пути для автомобилей на основе алгоритма колонии муравьев Matlab [включая исходный код Matlab, период 137]
[Планирование пути] Huawei Cup: оптимальное использование БПЛА для оказания помощи при бедствиях [включая исходный код Matlab 138 период]
[Планирование пути] на основе трехмерного планирования пути Matlab RRT [включая исходный код Matlab 151]
[Планирование пути] на основе планирования пути формирования БПЛА с искусственным потенциальным полем matalb [включая период Matlab 155]
[проблема VRP] на основе сохранения Matlab алгоритм Решение проблемы TWVRP [включая исходный код Matlab 156]
[проблема VRP] алгоритм сохранения Matlab для решения проблемы CVRP [включая исходный код Matlab 157]
[проблема VRP] алгоритм табу поиска Matlab для решения проблемы VRP [включая исходный код Matlab 158]
[VRP проблема】 Решить проблему CVRP на основе моделирования отжига в Matlab [включая исходный код Matlab 159]
[Проблема VRP] Решить проблему VRP с временным окном на основе искусственного косяка рыбы Matlab [включая исходный код Matlab 161]
[Проблема VRP] Решить проблему с помощью на генетическом алгоритме MATLAB проблема VRP [включая исходный код Matlab 162]
[Планирование пути] 3D-планирование пути на основе алгоритма Matlab wolf pack [включая исходный код 167 Matlab]
[Планирование пути] Планирование 3D пути БПЛА на основе искусственного потенциала Matlab [включая Matlab исходный код 168 период】
[Планирование пути] Трехмерное скоординированное планирование траектории для нескольких БПЛА на основе улучшенных различий в Matlab [включая исходный код Matlab 169]
[Планирование пути] Трехмерное планирование пути для нескольких БПЛА на основе искусственных пчелиных семей Matlab [включая исходный код Matlab 170 ]
[Планирование пути] 3D-планирование пути для БПЛА на основе алгоритма поиска Matlab Sparrow [включая исходный код Matlab 171]
[Планирование пути] 3D-планирование пути на основе алгоритма Matlab Ant Colony [включая исходный код Matlab 179]
[Планирование пути] Иммунный алгоритм Matlab Планирование кратчайшего пути [включая исходный код Matlab 194]