[Introdução ao contexto]
Os sistemas não tripulados muitas vezes enfrentam a tarefa de rastreamento e reconhecimento de alvos específicos, o que exige que o sistema não tripulado tenha a capacidade de identificar e localizar alvos. Ao mesmo tempo, as tarefas geralmente ocorrem durante um intervalo de tempo contínuo, e o mesmo alvo existe se o mesmo alvo existir. Se o alvo for descoberto repetidamente por um único robô ou por vários robôs, a reidentificação do alvo também será necessária para desduplicar o mesmo alvo. Camaradas que leram meu blog anterior saberão que trabalhei na detecção de alvos, câmera de luz visível e fusão de dados lidar e reidentificação de pedestres.Sim, todas essas tarefas estão abrindo caminho para as tarefas de reconhecimento e posicionamento de alvos aqui. .

【Plataforma de verificação de algoritmo】
Câmera binocular ZED
Robosence lidar
NVIDIA GeForce RTX 3070
[Plataforma de implantação de algoritmo]
Câmera binocular ZED
Robosence lidar
Intel Frost Canyon NUC (versão I7)
Chassi Songling Scout MINI
【Pilha de tecnologia de software】
invólucro zed-ros
rslidar_sdk
fusão de dados
darknet_ros
object_tracker
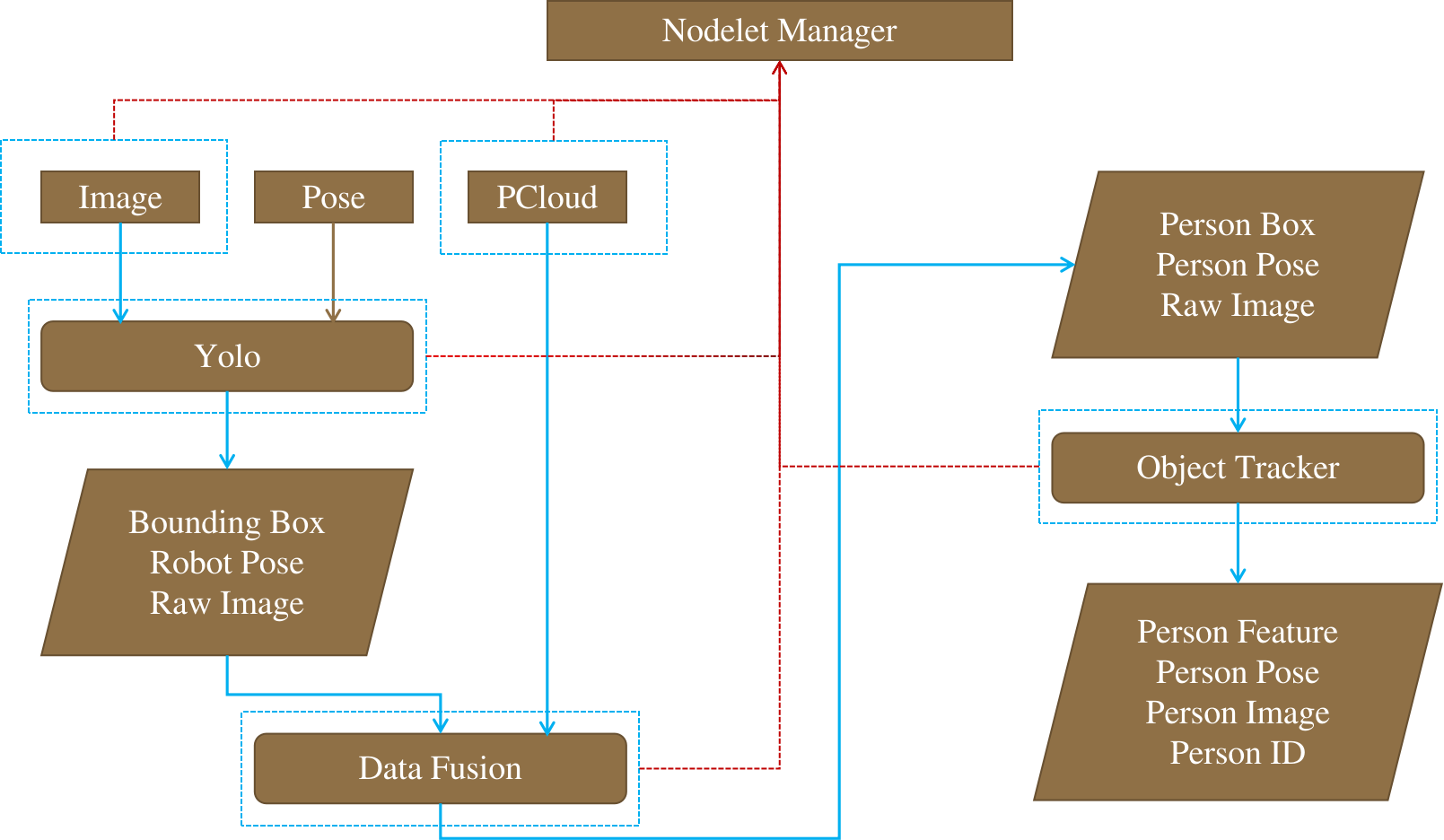
[Fluxograma de implementação]
【Vídeo de efeito】
Vou tirar outra foto e carregá-la quando tiver tempo. . .
[Melhorias posteriores]
1. A parte de reconhecimento de alvo usa o modelo Yolo-Lite mais leve, e a taxa de detecção de alvo no NUC pode chegar a 20FPS.
2. A parte de reidentificação do alvo usa a rede Mobile-Net mais leve, o que melhora muito a taxa de classificação.
3. A fusão de nuvens de pontos e imagens foi otimizada e a precisão da reprojeção de nuvens de pontos foi bastante melhorada.