Технология роя БПЛА имеет широкий спектр потенциальных применений, таких как поиск и спасение, мониторинг окружающей среды, сельское хозяйство, строительство, логистика и т. д. Работая вместе, несколько дронов могут повысить эффективность, расширить зону покрытия и выполнять задачи, которые сложно выполнить одному дрону. Чтобы обеспечить проверку алгоритмов роения дронов в помещениях и для более сложных задач и приложений, мы выпустили этот комплект для роения дронов — Crazyswarm.
Набор для роя дронов Crazyswarm
Crazyswarm — это платформа проверки алгоритма роя на базе дронов. Она направлена на изучение и реализацию скоординированного полета и поведения нескольких дронов. Она предоставляет разработчикам платформу проверки для экспериментов, обучения и развития, чтобы помочь им лучше понять управление и координацию. принципы систем с несколькими БПЛА, тестирование и проверка алгоритмов роения БПЛА, стратегии планирования пути, координационного поведения и т. д., тем самым способствуя исследованиям и применению технологии роя БПЛА и повышая эффективность исследований и разработок.

Аппаратный состав
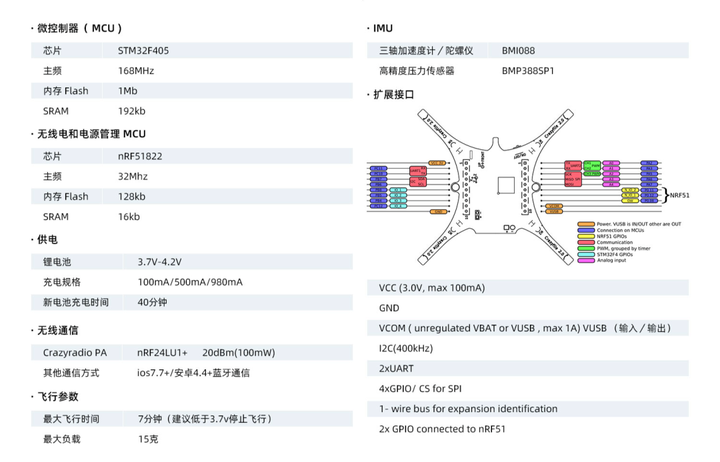
1. Дрон (Crazyflie). Основная аппаратная платформа Crazyswarm имеет необходимые компоненты, такие как управление полетом и датчики. Он представляет собой легкий дрон, вес которого составляет всего 27 г, а колесная база составляет 92 мм.
2. Базовая станция маяка: на основе системы позиционирования маяка сантиметрового уровня высокоточное позиционирование дрона достигается с помощью оптических сигналов, излучаемых базовой станцией.
3. Внешние датчики. Различные типы датчиков, такие как ультразвуковые и оптические датчики потока, используются для улучшения восприятия и позиционирования окружающей среды.
4. Хост моделирования Amov: используется для запуска ROS, алгоритмов управления, среды моделирования и т. д.
5. Модули беспроводной связи: такие как Bluetooth, CrazyradioPA и т. д. для реализации передачи данных и совместного полета между дронами.
Состав программного обеспечения
Состоящий из серии пакетов ROS и скриптов Python, он реализует такие функции, как управление дроном, моделирование и анализ данных. Предоставляет интерфейс PythonAPI/ROS/Matlab, облегчающий разработчикам разработку функций формирования.



Основные преимущества
1. Позиционирование на уровне сантиметра. Интегрируйте технологию Lighthouse для достижения высокоточного позиционирования БПЛА с помощью оптических сигналов, излучаемых базовой станцией, что позволяет БПЛА достигать более точного управления полетом и скоординированных действий.
2. Множественное управление роем: одновременно можно управлять десятками дронов, чтобы обеспечить полет стаи и совместное поведение. Разработчики также могут писать код для реализации совместных действий между различными дронами, таких как групповой полет, следование, коллективное уклонение от препятствий и т. д.
3. Широкие возможности настройки: система управления основана на ROS и позволяет разработчикам вносить индивидуальные модификации для удовлетворения особых потребностей в управлении или проведения конкретных исследований.
4. Планирование и контроль движения в реальном времени: поддерживает планирование и контроль движения в реальном времени, а также может корректировать траекторию полета дрона в соответствии с изменениями окружающей среды в реальном времени.
5. Несколько методов управления: поддержка Python API, MATLAB, разработки ROS и т. д., а также предоставление нескольких демонстрационных моделей кластеров, которые могут реализовать групповой полет, управление траекторией, совместную работу нескольких самолетов и другие функции.



Функции
1. Управление полетом: предоставляет расширенный интерфейс управления полетом. Разработчики могут писать код для управления положением, положением и скоростью дрона в полете для выполнения различных сложных полетных задач.
2. Интеграция датчиков. Интегрируйте различные датчики, включая акселерометры, гироскопы, датчики давления и т. д., для получения информации о состоянии и данных об окружающей среде дрона.
3. Виртуальное моделирование: предоставляет среду виртуального моделирования, в которой разработчики могут моделировать полет и совместное поведение дронов на компьютерах для разработки и тестирования алгоритмов.
4. Масштабируемость: поддерживает модульную конструкцию, разработчики могут добавлять различные платы расширения (деки) для добавления функций, таких как системы позиционирования, датчики и т. д.
Технический принцип
1. Технология беспроводной связи. Используйте технологию беспроводной связи (например, диапазон ISM 2,4 ГГц и Bluetooth с низким энергопотреблением) для реализации связи между дронами, чтобы они могли выполнять совместные полеты, обмен информацией и управление кластером.
2. Технологии позиционирования и навигации. Используйте системы позиционирования (такие как Lighthouse) для достижения высокоточного позиционирования и навигации БПЛА, тем самым обеспечивая точное управление кластером и групповой полет.
3. Сенсорная технология: оснащена различными датчиками, включая акселерометры, гироскопы, датчики давления и т. д., которые используются для определения состояния и информации об окружающей среде дрона в режиме реального времени.
4. Алгоритм управления: используйте передовые алгоритмы управления, такие как контроллер Меллингера, ПИД и т. д., для достижения стабильного полета, группового полета и других функций дрона.
5. Алгоритм кластерного сотрудничества. Используйте алгоритмы кластерного сотрудничества, такие как планирование пути, стратегии обхода препятствий и т. д., чтобы позволить кластерам дронов летать совместно, поддерживать строй и т. д. Технические характеристики
прогноз на будущее
Мы считаем, что благодаря высокой масштабируемости аппаратного обеспечения и богатым программным интерфейсам Crazyswarm также может изучить применение технологий глубокого обучения и искусственного интеллекта в будущем для достижения более совершенной обработки изображений, распознавания целей, прогнозирования поведения и других функций. Эти направления развития откроют Crazyswarm более широкие перспективы применения и технологические инновации.
Поддержка учебных ресурсов:
1. Адрес github Crazyswarm: https://github.com/USC-ACTLab/crazyswarm
2. Техническое руководство Crazyswarm: https://docs.amovlab.com/crazyswarmwiki