Informação requerida:
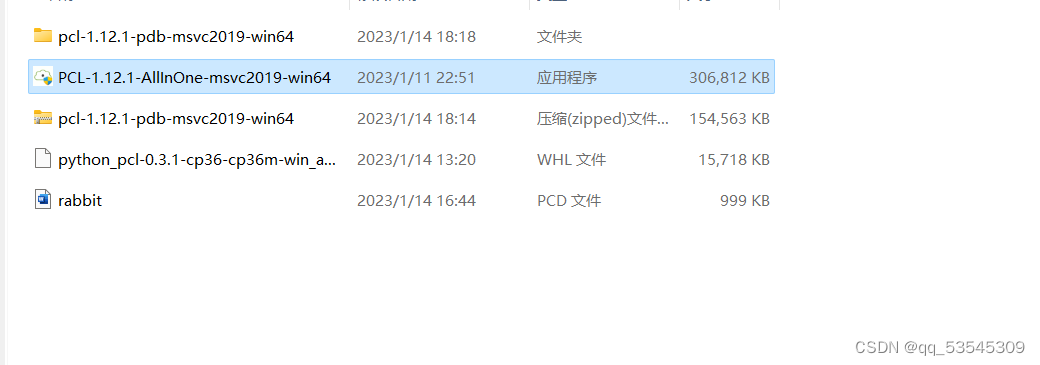
python_pcl-0.3.1-cp36-cp36m-win_amd64.whl
Pacote compactado: pcl-1.12.1-pdb-msvc2019-win64
programa pcl: PCL-1.12.1-AllInOne-msvc2019-win64
disco de rede:
Link: https://pan.baidu.com/s/1vct8dWCIKI5CouMVhbO3kQ
Código de extração: 1bec
Arquivo PCD usado para verificar o sucesso da instalação:


Etapa 1: clique duas vezes no aplicativo para instalá-lo
Passo 2: Adicione variáveis de ambiente (será gerada automaticamente uma pasta onde o software está instalado)
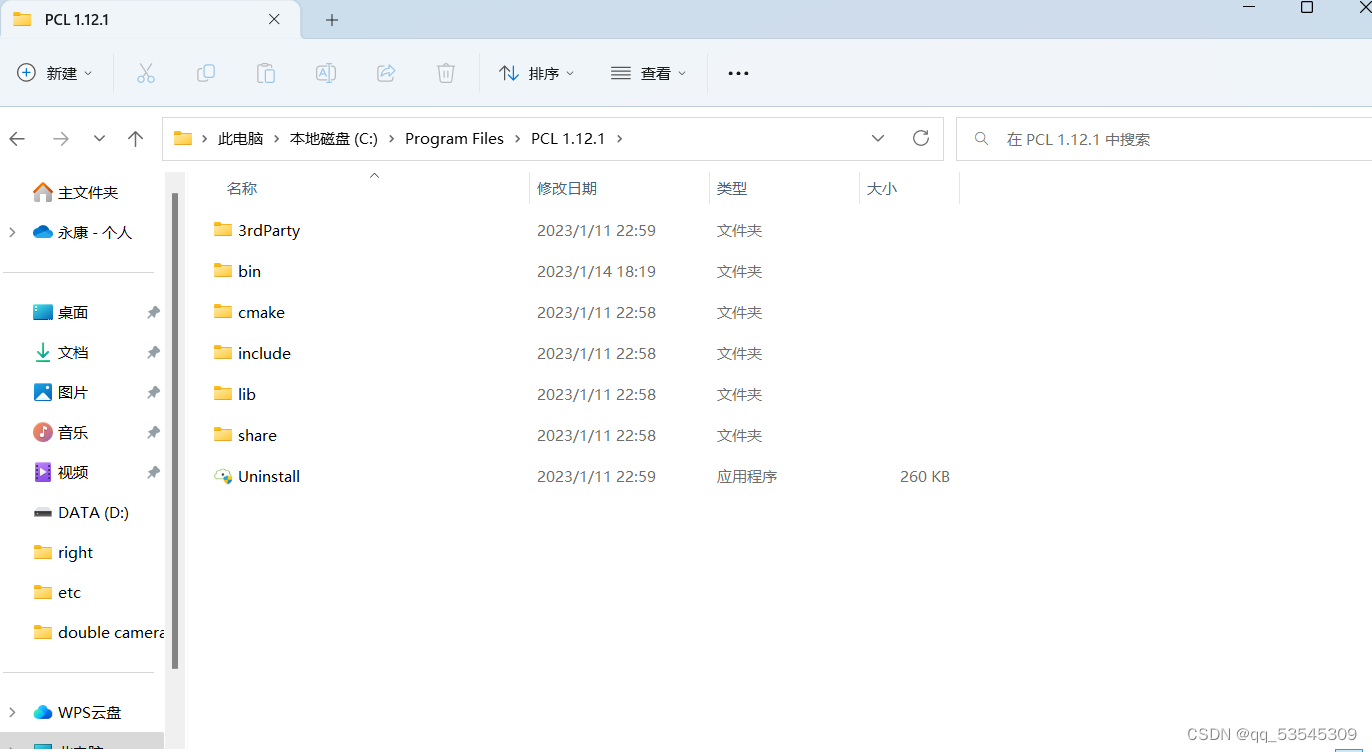

terceiro passo:
Descompacte pcl-1.12.1-pdb-msvc2019-win64.zip e copie todos os arquivos descompactados para C:\Program Files\PCL 1.12.1\bin
o quarto passo:
Encontre isso, clique duas vezes para instalar
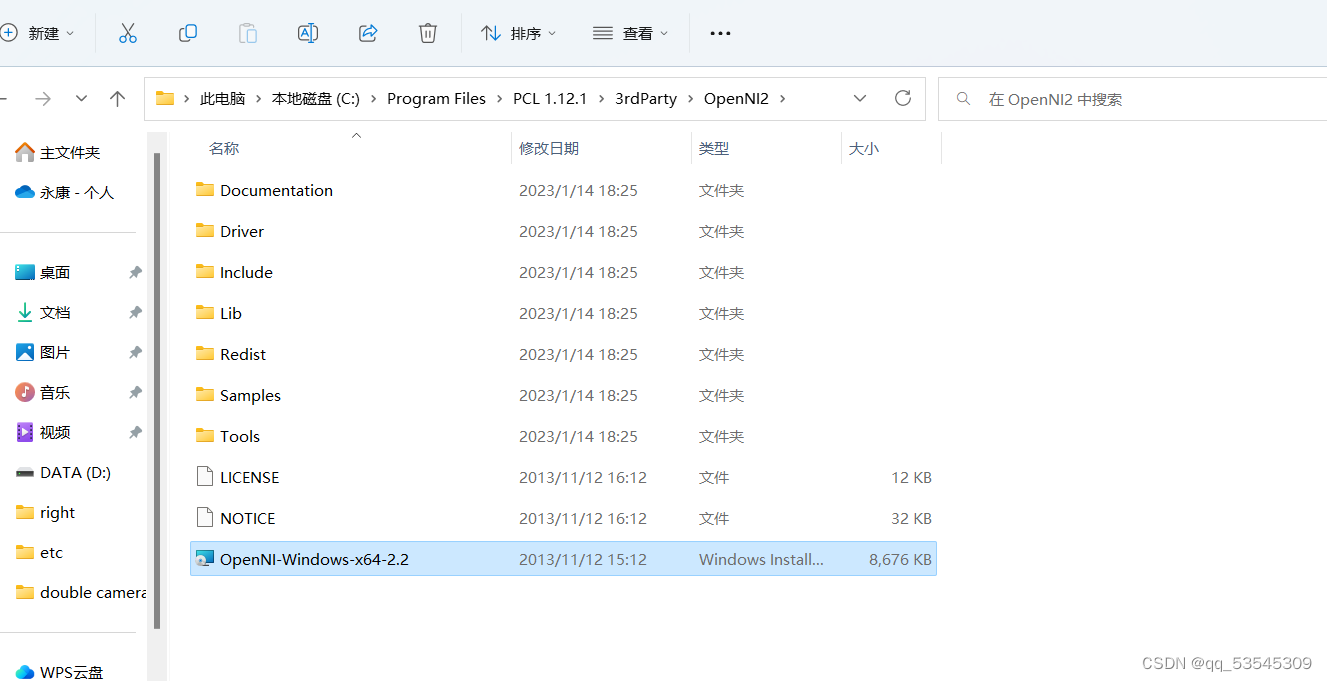
Caso 1: Se você o instalou antes, clique em remover e execute novamente o arquivo OpenNI-Windows-x64-2.2.msi para instalá-lo.
Caso 2: Se você ainda não instalou, basta instalá-lo diretamente.
Nota especial: O caminho de instalação está definido em C:\Program Files\PCL 1.12.1\3rdParty\OpenNI2. (no mesmo diretório do arquivo OpenNI-Windows-x64-2.2.msi)
Etapa 5: Baixe python_pcl-0.3.1-cp36-cp36m-win_amd64.whl.
Entre no ambiente virtual de ativação, entre na pasta onde este arquivo está localizado e execute o comando de instalação:
pip instalar python_pcl-0.3.1-cp36-cp36m-win_amd64.whl
Finalmente: Erro ImportError: Falha no carregamento da DLL: O módulo especificado não foi encontrado.
Traceback (última chamada mais recente):
Arquivo "<stdin>", linha 1, em <module>
Arquivo "D:\Anaconda3\envs\python36\lib\site-packages\pcl\__init__.py", linha 5, em <módulo>
de ._pcl import *
ImportError: Falha no carregamento da DLL: o módulo especificado não foi encontrado.
pcl depende de OpenNI2.dll, encontre OpenNI2.dll em D:\OpenNI2\Samples\Bin
Copie-o para D:\Anaconda3\envs\python36\Lib\site-packages\pcl, tente novamente e funcionará
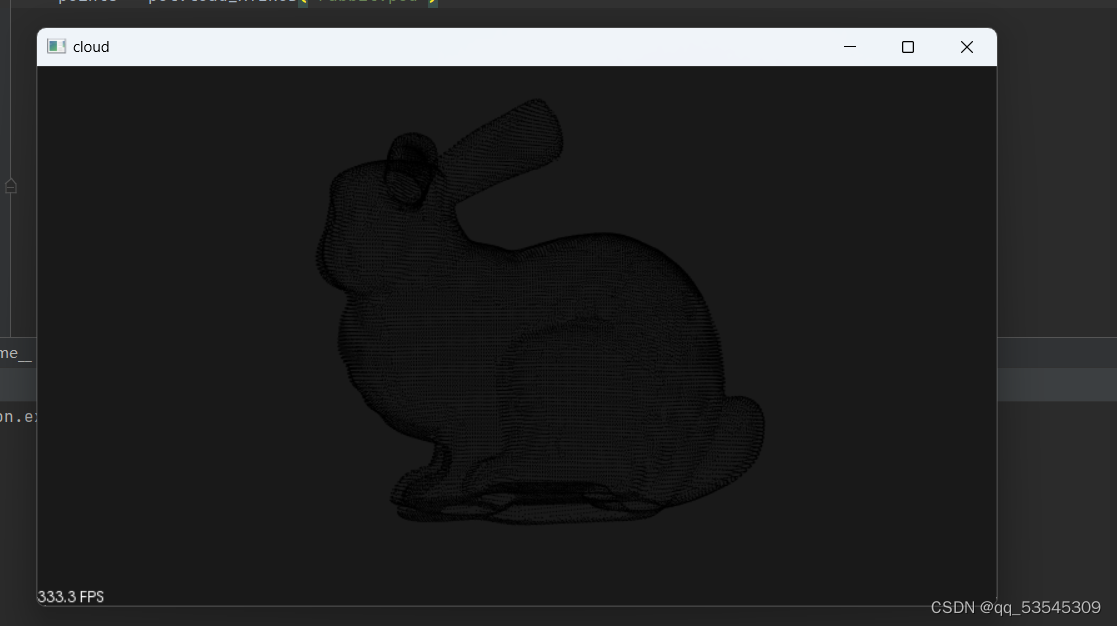
Verifique: O pcl foi instalado com sucesso?
importar pcl
importar numpy as np
importar pcl.pcl_visualization
if __name__ == "__main__":
pontos = pcl.load_XYZRGB('rabbit.pcd')
visualizador = pcl.pcl_visualization.CloudViewing()
visualizador.ShowColorCloud(pontos, b'cloud')
v = Verdadeiro
enquanto v:
v = não (viewer.WasStopped())