Prefácio
O espaço K é o núcleo da reconstrução de imagens de ressonância magnética. Como o autor, muitas pessoas podem se perguntar por que o espaço K é o espaço no domínio da frequência da imagem. Olhando para o processo de preenchimento, é obviamente a amostragem e preenchimento do sinal espacial. Existem poucos artigos discutindo esse assunto na Internet, então anoto meu entendimento aqui para sua referência.
Codificação de posição de ressonância magnética
A MRIvarredura atual é uma falha ou falhas múltiplas.A chamada falha é uma superfície espessa, que zé selecionada pelo campo de gradiente de direção. O objetivo da varredura de uma falha é obter o 各位置status do próton da falha . Eles carregam informações sobre as propriedades do tecido e o que refletem é a intensidade do sinal. Se toda a falha usa a mesma intensidade do campo magnético e só podemos obter o sinal total de uma falha, é obviamente impossível distinguir qual sinal vem de onde, e o que obtemos é apenas um pedaço do caos. Apenas diferenças podem ser distinguidas.A chamada codificação de posição (codificação de frequência e codificação de fase) é usada para fazer essa diferença. Ao adicionar xe ydirecção de campo de gradiente, de modo que a intensidade do campo magnético de cada um da localização de falhas são diferentes (embora ambos não forem adicionados simultaneamente, mas o efeito final em conjunto de modo que a intensidade do campo magnético é diferente para cada posição), um w=γBcampo diferente A frequência de spin é diferente, de modo que o momento magnético total do próton em cada posição pode acumular diferentes fases e, por fim, o acúmulo de fases torna-se a base para separar os sinais de posição no sinal total. Conforme mostrado na Figura 1 (modificado do PPT do professor Jia Guang de Xidian ), quando a x、ydireção é aplicada independentemente com o campo de gradiente, cada posição apenas tacumula a situação de fase sob o tempo de ação do campo magnético do campo de gradiente (sem considerar o campo magnético principal) .
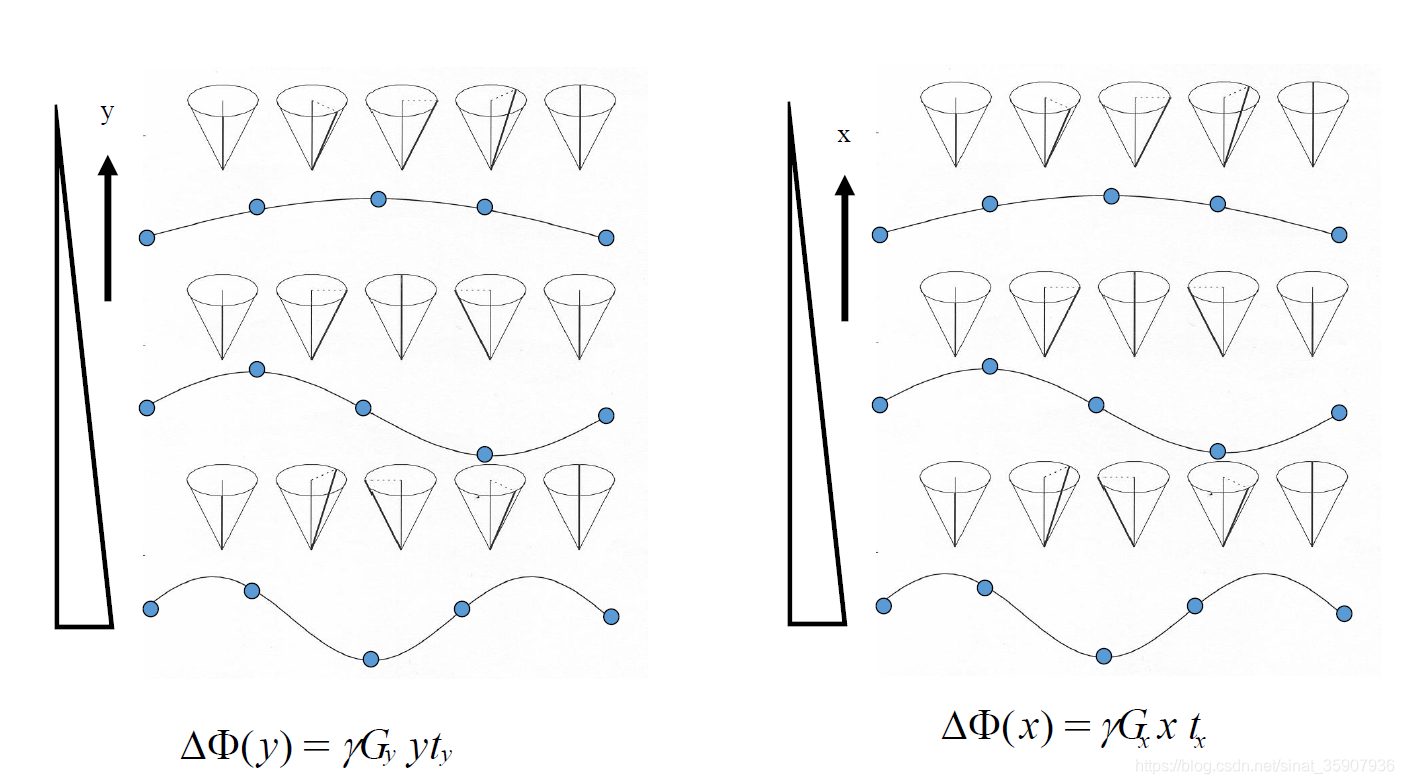
Devido à natureza do computador, as coordenadas espaciais são discretas e a falha tem uma espessura, portanto, cada posição é um voxel determinado por (x, y). Desta forma, a posição acima se refere ao voxel aqui. No processo de geração e aquisição de sinal, o campo de gradiente na direção y é adicionado por um período de tempo e, em seguida, o campo de gradiente na direção x é adicionado por um período de tempo para realizar a codificação de posição. É fácil saber que cada voxel tem um certo efeito na ydireção e no xcampo de gradiente de direção. A acumulação de fases após o tempo é a soma das acumulações de fases agindo ao mesmo tempo em duas direções. Agora assumimos que a intensidade do sinal de um voxel (x, y) é f (x, y), e é um sinal sinusoidal, então o sinal s (x, y) gerado pelo voxel pode ser usado com amplitude e gradiente A fase causada pelo campo é expressa pela equação (1):

Visto que o sinal coletado a cada vez é a superposição dos sinais de voxel, o sinal coletado pode ser dado pela equação (2). É fácil ver que γ e G são constantes e x e y são integrados, então o sinal total não é uma função de x e y, mas só pode ser uma função da duração t do campo gradiente nas direções x e y.

espaço k
O espaço K é o núcleo da reconstrução de imagens de ressonância magnética e é uma invenção genial, por meio dele é possível obter rapidamente a distribuição de intensidade f (x, y) de cada sinal de voxel no slice, ou seja, a imagem de ressonância magnética nuclear. Observando a expressão do sinal de falha coletado s, ou seja, a equação (2), pode-se descobrir que é muito semelhante à expressão de Fourier bidimensional na equação (3), então um cientista gênio pensou em usar a transformada de Fourier para processar este problema.

Nesse momento, se a fórmula (2) for usada, a

fórmula (2) pode ser transformada na fórmula (4). É fácil descobrir que essa fórmula é a distribuição da intensidade de cada sinal de voxel na falha f (x, y), transformada de Fourier para bidimensional A expressão do sinal do domínio da frequência. Se o valor total do sinal s obtido por cada amostragem, o valor S obtido após a substituição da variável simples, for preenchido no local de armazenamento na ordem especificada, então um espaço será formado após o preenchimento, uma vez que o valor nele é uma função de k, é chamado É o espaço k. Obviamente, deve ser o espectro de frequência de f (x, y). (Essa substituição de variável pode ser feita diretamente por meio do hardware)

Se obtivermos o espectro de frequência (ou seja, o espaço k é preenchido), após uma transformação inversa de Fourier, f (x, y) é a distribuição de intensidade, ou seja, a imagem de ressonância magnética nuclear. A expressão é como (5)

Nota: No processo de preenchimento do espaço k, kx é alterado pelo tempo de amostragem tx, tx aumenta por Δt uma vez que a amostragem e kx também aumenta por Δkx, razão pela qual um conjunto de valores de sinal são amostrados para preencher uma linha do espaço k, e ky é alterado mudando Gy Para conseguir isso, depois que um TR muda ΔGy, e então muda Δky, isto é, ky dentro de um TR é o mesmo, o que também explica porque um conjunto de valores de sinal são amostrados para preencher uma linha do espaço k.
referência
https://www.bilibili.com/video/BV1JJ411W7Fv
https://www.dushu.com/book/13293977/