diretório ROS aprender ----- baseada em simulação de sensores ubuntu16.04 ambiente robô construído Gazebo
- Primeiro, antes de o ambiente Gazebo para construir pronto
- Em segundo lugar, criar um lançamento parâmetros do arquivo de configuração do arquivo mundo
- 1, na mbot_gazebo pacote de engenharia
- 2, crie uma pasta mundos
- 3, para a pasta
- 4. Crie um arquivo playground.world
- 5. Criar um arquivo room.world
- Em terceiro lugar, com base no sensor Gazebo [Câmara] ambiente de compilação
- 1, crie um arquivo para executar câmera sensor de
- 2, abra um terminal e execute o arquivo lançamento da câmera
- 3, aberto Rviz, exibição de câmara
- Em quarto lugar, com base no sensor Gazebo [Kinect] ambiente de compilação
- 1, crie um arquivo para executar sensor Kinect
- 2, abra um terminal e execute o arquivo lançamento kinect
- 3, aberto Rviz, exibição de câmara
- V. Gazebo sensores baseados [o ponto nuvem Lidar] ambiente de compilação
Gazebo como usar estruturas ambientais, está inserida aprender devemos, mas também entre o pesado, por isso temos de nos concentrar compreensão Oh!
Última ROS Lin junho idosos Blogue Aprendizagem explica como construir nosso ambiente espacial gazebo para construir no ambiente ROS, que é o primeiro passo para aprender gazebo, operação de entrada, este blog, vamos realizar mais ambiente robô em profundidade Gazebo construir três sensores ambiente construído: câmera, kinect, Lidar
versão: ubuntu16.04
Primeiro, antes de o ambiente Gazebo para construir pronto
1, será baixado para construir o modelo em nosso ambiente gazebo
A fim de ser capaz de completar o seguimento do nosso gazebo modelo de simulação de carga é criado, vamos ser o melhor modelo gazebo baixado para o local, não o modelo criado pela rede, porque o acesso ao site estrangeiro, de modo muito lento!
1) para a pasta gazebo escondida
cd ~/.gazebo/
2) criar nossos modelos pasta no diretório do arquivo
mkdir -p models
3), para a pasta
cd ~/.gazebo/models/
4), arquivo de download modelo
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
5), extrair os arquivos para a nossa pasta de diretório arquivo de modelo
ls model.tar.g* | xargs -n1 tar xzvf
Acima é todo o processo de nosso download modelo, Dicas, o processo é muito lento, espera-o lentamente, a apenas 100 M é a velocidade muito lenta, porque o acesso a sites estrangeiros
se necessário Lin Jun carta particular os idosos, eu baixei bem, você pode enviar o seu oh! Resource é muito grande, o blog não posso fazer upload de recursos, eu upload de permissões apenas 200m do mesmo!
2, versão atualizar nosso gazebo
Nota: Esta etapa requer apenas a versão ubuntu16.04 dos pequenos parceiros envolvidos, versão ubuntu18 sem ter que executar este passo, porque a situação não parece incompatível!
A razão para atualizar a nossa versão gazebo, porque quando versão do gazebo7.0.0 ubuntu16.01 instalação automática de ROS baixado automaticamente,Isso nos leva a fazer atrás do sensor de câmera traseira quando ocorre um erro, quando corremos o sensor da câmera, em seguida, entrar RVIZ exibição de imagem de configuração, você receberá um erro:

O acesso a uma grande quantidade de informações, sem sucesso, e, finalmente, após a atualização, você pode encontrar uma boa solução para este problema! Claro, esta versão do usuário para ubuntu16.04 Oh, versão ubuntu18 da versão ROS e não o mesmo que 16, pode perfeitamente realizar a próxima operação!
1), instalaçãoaptidãoDownloader, o download é poderoso, é recomendável usar o downloader, ao invés deapt-get
sudo apt-get install aptitude
2), a versão de atualização do gazebo
sudo aptitude install gazebo7
Da mesma forma, o processo é um pouco longo, provavelmente, alguns 50 M, esperar por ele, como mostrado abaixo será atualizado para a versão 7.16:

Estas são as etapas de pré-preparação para simulação de construção ambiente, agora entramos na gazeno modelo ambiente construído
Em segundo lugar, criar um lançamento parâmetros do arquivo de configuração do arquivo mundo
1, na mbot_gazebo pacote de engenharia
cd ~/ros/src/mbot_gazebo/
2, crie uma pasta mundos
mkdir -p worlds
3, para a pasta
cd worlds
4. Crie um arquivo playground.world
1), a criação do arquivo
touch playground.world
2), abra o arquivo e escrever o código a seguir:
gedit playground.world
conteúdo de código é muito longo, inconveniente para mostrar aqui, podemos ir para o meu último blog Descarregar ROS aprender o que precisamos gazebo pacote de engenharia, que existem documentos que precisamos, copiar o passado na linha: segue:
em parte como segue :
5. Criar um arquivo room.world
1), a criação do arquivo
touch room.world
2), abra o arquivo e escrever o código a seguir:
gedit room.world
Da mesma forma, o conteúdo do código é muito longo, você pode ir para o meu último blog Descarregar ROS aprender o que precisamos gazebo pacote de engenharia, cópia seguinte forma:
em parte como segue:
Em terceiro lugar, com base no sensor Gazebo [Câmara] ambiente de compilação
1, crie um arquivo para executar câmera sensor de
1), inicie o arquivo para o diretório do projeto pacote pasta mbot_gazebo
cd ~/ros/src/mbot_gazebo/launch
2) para criar o arquivo de lançamento de uma câmera de sensor
touch view_mbot_with_camera_gazebo.launch
3), abra o arquivo
gedit view_mbot_with_camera_gazebo.launch
4), o transdutor de gravaçãoCâmeraAs instruções de configuração modelo
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_camera_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
2, abra um terminal e execute o arquivo lançamento da câmera
1) para dentro do espaço de trabalho ROS
cd ~/ros
2) Execute a câmera de simulação
roslaunch mbot_gazebo view_mbot_with_camera_gazebo.launch
3), terminal de corrida tiro:
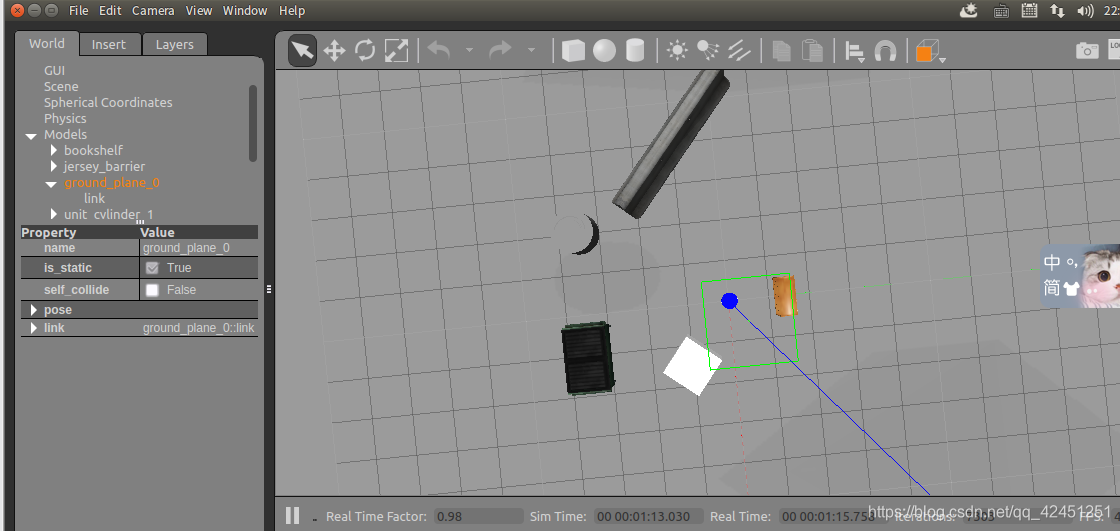
4), software de simulação Gazebo correndo tela
3, aberto Rviz, exibição de câmara
1), o novo terminal, o espaço de trabalho para as ROS
cd ros
2) Executar Rviz
rosrun rviz rviz

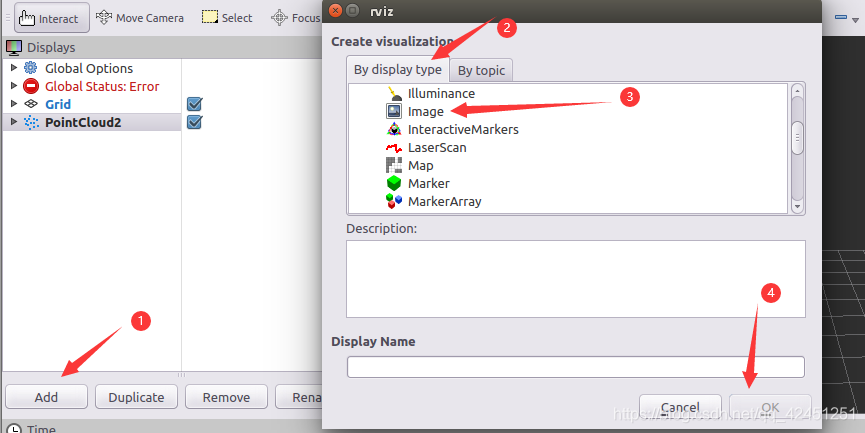
3) Click add> pelo visor de tipo> imagem-> OK
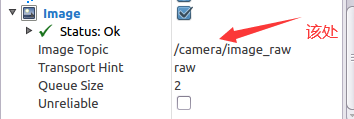
4), os parâmetros de configuração da imagem.
Na FIG como configuração:
suspensa nome selecção da

configuração de imagem é como se segue:
5), mostra os resultados como se segue:
Em quarto lugar, com base no sensor Gazebo [Kinect] ambiente de compilação
1, crie um arquivo para executar sensor Kinect
1), inicie o arquivo para o diretório do projeto pacote pasta mbot_gazebo
cd ~/ros/src/mbot_gazebo/launch
2) para criar um sensor kinect arquivo de lançamento
touch view_mbot_with_kinect_gazebo.launch
3), abra o arquivo
gedit view_mbot_with_kinect_gazebo.launch
4), o transdutor de gravaçãokinectAs instruções de configuração modelo
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_kinect_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
2, abra um terminal e execute o arquivo lançamento kinect
1) para dentro do espaço de trabalho ROS
cd ~/ros
2) Execute o kinect simulação
roslaunch mbot_gazebo view_mbot_with_kinect_gazebo.launch
3), terminal de corrida tiro:
4), software de simulação Gazebo correndo tela

3, aberto Rviz, exibição de câmara
1), o novo terminal, o espaço de trabalho para as ROS
cd ros
2) Executar Rviz
rosrun rviz rviz
3) Click add> pelo visor de tipo> imagem-> OK
4), os parâmetros de configuração da imagem.
Na FIG como configuração:
suspensa nome selecção da
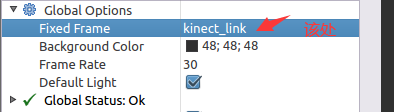
configuração de imagem é mostrado abaixo, em que a selecção suspensa:

5), mostra os resultados de abaixo:

V. Gazebo sensores baseados [o ponto nuvem Lidar] ambiente de compilação
1, crie um arquivo para executar o sensor Lidar
1), inicie o arquivo para o diretório do projeto pacote pasta mbot_gazebo
cd ~/ros/src/mbot_gazebo/launch
2) Criar um lançamento sensor de arquivo Lidar
touch view_mbot_with_laser_gazebo.launch
3), abra o arquivo
gedit view_mbot_with_laser_gazebo.launch
4), o transdutor de gravaçãolaserAs instruções de configuração modelo
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_laser_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
2, terminal aberto, execute o arquivo de lançamento de Lidar
1) para dentro do espaço de trabalho ROS
cd ~/ros
2) Simulação Run Lidar
roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
3), terminal de corrida tiro:
4), software de simulação Gazebo correndo tela

3, aberto Rviz, visualizador radar
1), o novo terminal, o espaço de trabalho para as ROS
cd ros
2) Executar Rviz
rosrun rviz rviz
3) Click add> pelo visor de tipo> imagem-> OK
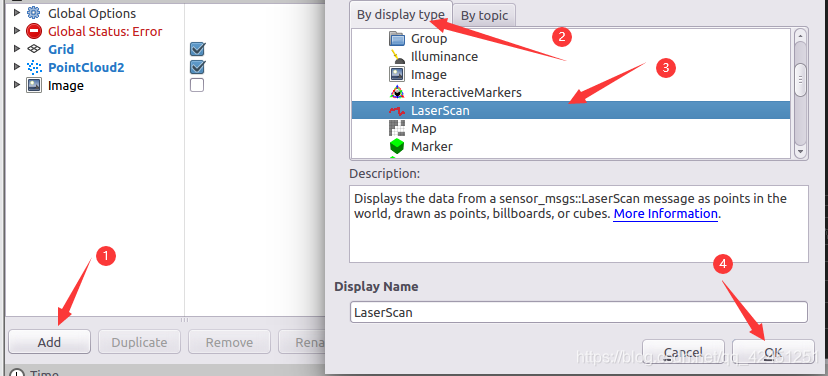
4), os parâmetros de configuração Laserscan.
FIG como configuração:
suspensa selecção Odom:
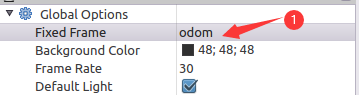
configuração Laserscan é mostrado abaixo, onde os suspensas selecção:

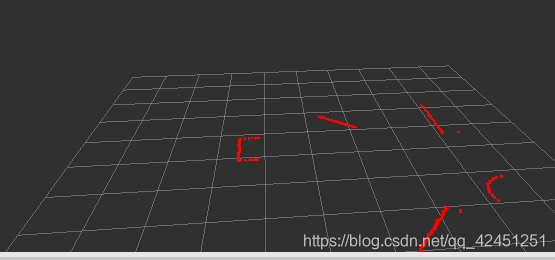
5), mostra os resultados de da seguinte forma:
isso é tudo por este blog amigos, esperança para ler este blog pode ajudar a uma melhor aprendizagem ROS simulação de robôs pequenos parceiros Oh! Problemas encontrados pequenos amigos são bem-vindas aos comentários comentário de área, consulte idosos Lin Jun lhe dará a resposta, os idosos não são muito frio!
Chen programar anos e um dia em janeiro ^ _ ^
