2.1.镜场公式
2.1.1 基本レイアウト
タワー型太陽熱発電の分野では、Laurenceらが提案した輻射グリッドレイアウトが広く用いられているレイアウト手法である。この配置方法は、ヘリオスタットを等方位線に沿って一定の半径で交互に配置するもので、半径方向の距離が増加するにつれて、ミラーフィールドの配置も密から疎になる傾向を示します。ヘリオスタットと吸熱塔の位置関係を定量的に表現するために、半径方向間隔 ΔR と方位角方向間隔 ΔA という 2 つのパラメータも導入します。
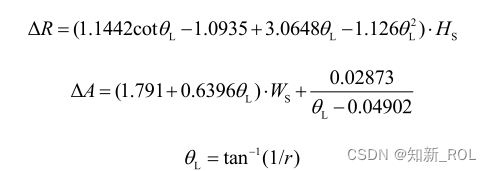
式中、HS はヘリオスタットの高さ、WS はヘリオスタットの幅、L はヘリオスタットに対するコレクタの高さの角度、r は目標点の高さ (つまり、ヘリオスタットの中心点からの高さ) です。コレクタオリフィスからヘリオスタットまでの距離(鏡面中心点からの垂直距離)を単位距離としたときのヘリオスタットから吸熱塔までの水平距離
放射グリッド配置の考え方に基づいて、同じ半径方向に隣接するヘリオスタットのブロッキング損失を避けることを目的とした幾何学的な描画設計手法と組み合わせて、後にEB、No block-dense、DELSOLが導出されました。ソーラーミラーフィールドのレイアウトの主な違いは、タワー付近の半径方向の間隔と方位角の間隔の配置ルールが異なることです。遮るものがない半径方向の間隔を計算する式は次のとおりです。
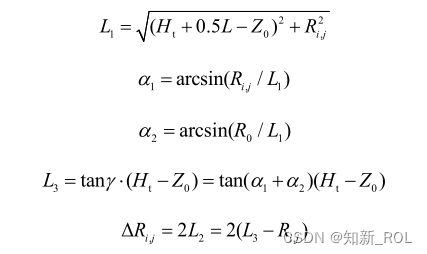
式中、Htは吸熱器タワーの光学高さ、Lは吸熱器の高さ、L1は吸熱器の中心点と前列ヘリオスタットミラーの中心点を結ぶ線の長さ、L1は吸熱器の中心点と前列ヘリオスタットミラーの中心点を結ぶ線分である。 L2は後列のヘリオスタットで反射した光で、前列のヘリオスタットで光が遮られた場合、前列と後列のヘリオスタットの端点を結んだ線の中心点と前列の中心点との水平距離ヘリオスタットミラー; L3 は前列のヘリオスタットミラーの中心点からの熱吸収距離 タワーの水平距離; 1 は熱吸収体の中心点と前列の中心点を結ぶ線の間の角度ヘリオスタットミラーと熱吸収塔の垂直軸、2 は熱吸収体の中心点と最前列ヘリオスタットミラーのなす角度 中心点を結ぶ線と端面からの反射光を結ぶ線とのなす角度後部ヘリオスタットからの反射光が前部ヘリオスタットによって遮られない場合、後部ヘリオスタットの点から熱吸収体の中心点までの距離、Z0 はヘリオスタットの中心、水平地面からの高さ、R0 はヘリオスタットの半径リング; Ri,j は、ミラーフィールドの i 番目の領域にある j 番目のミラーリングの半径; は、ヘリオスタットの前列によってブロックされないだけで、後部のヘリオスタットによって反射された光です。反射光と吸熱塔の軸との間の距離。オクルージョンフリー幾何描画法の模式図を図 2.1 に示します。

3 つのレイアウトはすべて、同じエリアに属するヘリオスタットの方位角が一貫している必要があることを規定しているため、同じエリア内の各ミラー リングに収容されるヘリオスタットの数は同じであり、同じミラー リング上のヘリオスタット間の方位角間隔は等しくなります。ミラー リングの半径が増加するにつれて、各ミラー リングの方位角の間隔も徐々に増加します。このとき、方位角間隔リセット制限係数 Arlim を使用して各エリアのミラー フィールドの範囲を制限し、土地の利用率を向上させます。そうでない場合、ミラー リングの方位角間隔は増加し続け、ミラー フィールドの配置が崩れてしまいます。ますますまばらになります。
2.1.2 DELSOL レイアウト
図 2.2 に示す DELSOL レイアウト。

DELSOLでは、ミラーフィールドの特定の領域におけるヘリオスタットの最後のリングと最初のリングの間の方位角距離の比がArlimより大きい場合、次のミラーフィールド領域の配置が開始されます。ミラーフィールドの新しいエリアを配置するための条件は次のとおりです。
![]()
式中、AZi,1 はミラーフィールドの i 番目の領域の最初のリングにあるヘリオスタットの方位角間隔、AZi,k は i 番目のエリアの最後のリングにあるヘリオスタットの方位角間隔です。ミラーフィールドのエリア。ヘリオスタットの特性長 DM、各領域の第 1 リングヘリオスタットの方位角間隔 AZi,1 、各領域の方位角 AZ,i 、各ミラーリングのヘリオスタット数 Nhel,i の計算式は次のとおりです。以下に続きます:

最初の領域から始めて、ミラーフィールドの半径方向の間隔がΔR=DMを満たすことが指定されます。ミラーリングの半径が増加するにつれて、ΔRi,j=DM がオクルージョンなしの条件を満たさなくなると、i 番目の領域の j+1 リングでオクルージョン損失が発生し始めるため、R を 0 から大きくする必要があります。このとき、幾何学的な描画方法に従って半径方向の間隔が再決定されます (式 (2.4) ~ (2.8) を参照)。
2.1.3 EB レイアウト
EB レイアウト (図 2.3 を参照)
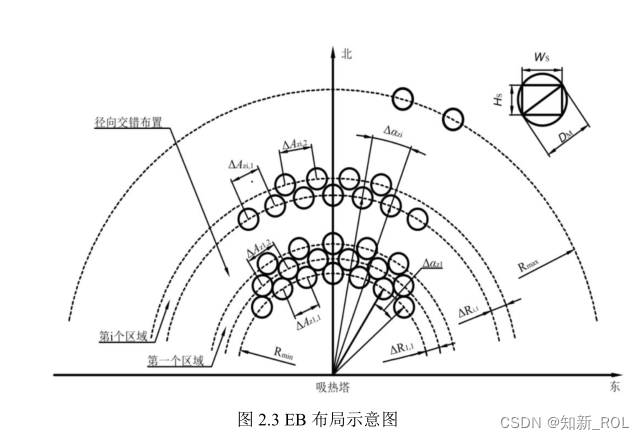
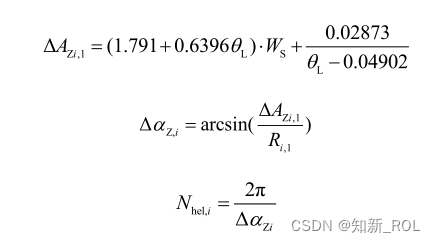
ミラーフィールドの各領域における最初のリングヘリオスタットの方位角間隔の計算式は次のとおりです。

この式では、Asf は方位角間隔係数であり、その値は主にタワーの高さに関係し、通常は 2 の値を取ります。各エリアの最初のリングを除き、残りのリングのヘリオスタットの方位角間隔は、エリア内のヘリオスタットの方位角から計算されます。計算式は次のとおりです。
式中、AZi,j は、ミラーフィールドの i 番目の領域にある j 番目のリングヘリオスタットの方位角間隔です。i 番目のミラーフィールド領域におけるヘリオスタットの方位角の計算式は次のとおりです。
![]()
各ミラーリングのヘリオスタット数の計算式を式(2.13)に示します。
隣接するミラーフィールド領域の接合部におけるヘリオスタット間の半径方向の距離は、RDMに設定されます。R1,1 は、ミラーフィールドの最初の領域
の最初のリングと 2 番目のリングの間の半径距離です。計算式は次のとおりです。
同じエリア内の隣接するリングのヘリオスタット間の半径方向の距離は、常にR1,1 に設定されます。ミラーフィールド半径が特定の値まで増加すると、対応するリングヘリオスタットがオクルージョン損失を受け始め、その後、幾何学的な描画方法を使用して半径方向の間隔が再決定されます。式1を参照してください。
2.1.4 ブロック密度の高いレイアウトを使用しない
図 2.4 に示すように、ブロック密度の高いレイアウトはありません。
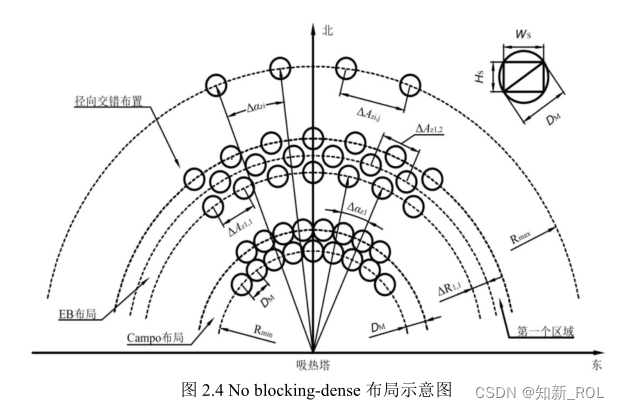
このレイアウトは Campo レイアウト [23] と EB レイアウト手法から構成されます。タワー付近の領域でのさまざまな種類の光学効率の損失が小さいため、カンポ レイアウトを使用してミラー フィールドの中央領域に高密度のミラー フィールドを生成します。これには、ヘリオスタットの等価円が必要です。ミラーリングは接線に配置され、隣接するミラーリングは接線に配置される必要があり、ヘリオスコープも互いに接しており、半径を指定しながらヘリオスコープ間の半径方向の距離、つまり方位角距離ADMが最小になります。距離RDM。ただし、ミラーフィールド半径が大きくなるにつれて、Campo レイアウトを継続すると、方位角とヘリオスタット間の半径方向の距離が小さいため、広範囲のシャドウオクルージョン損失が発生するため、以降は EB レイアウトが使用されます。
2.2 ミラーフィールドのモデリングと解析
2.2.1 ミラーフィールドモデリング
1) ミラーフィールドの光学効率.
ミラーフィールド内のヘリオスタットの数は通常数千から数万に及ぶため、ミラーフィールド効率を一年中毎日シミュレーションして解析すると計算量は非常に膨大になります。夏至、秋分、冬至)を離散時間サンプリングとして使用し、対応する時点での光効率を計算し、年平均光効率を取得します[2]。ミラーフィールドの開き角度が 15° であるという事実に基づいて [23]、太陽位置アルゴリズム [24] (SPA) を使用して、典型的な太陽高度角が 15° を超えるタイムゾーンを計算します。ミラーフィールドは 30 分間隔で連続的にシミュレーションされ、光効率と受信エネルギーが計算されます。
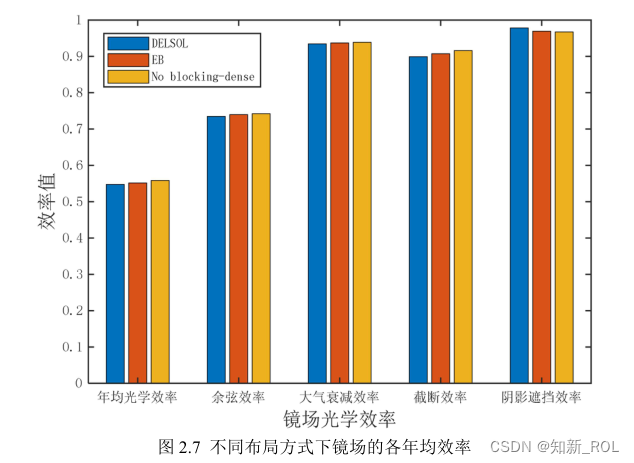
ミラーフィールドの光学効率は主にコサイン効率、大気減衰効率、シャドウオクルージョン効率、トランケーション効率で構成されます[4]。異なるレイアウトにおけるミラーフィールドの平均年間効率を図 2.7 に示します。ブロッキング密度のないレイアウトを使用したヘリオスタット フィールドの全体の平均年間光効率は 56.40% にも達する可能性があり、EB レイアウトの平均年間効率はわずかに低く 55.10% であり、DELSOL レイアウトは最も低いのは 53.90% です。この現象の主な理由は、最初の 2 つのミラー フィールド配置がよりコンパクトであり、より効率的なタワー近くの領域にブロック密度のないレイアウトにより、より多くのヘリオスタットを収容できることです。また、図 2.7 より、どのレイアウト方法を採用してもコサイン効率の値が最も低いことが分かりますが、これはその大きさが主に太陽の位置と鏡面座標に依存し、コサイン損失が避けられないためです。大気減衰効率と遮断効率はそれぞれヘリオスタットと吸熱塔間の距離とヘリオスタットの追尾精度に関係しており、一般にその値は比較的高い。シャドウ オクルージョン効率は主にミラー フィールドの配置に影響されます。これら 3 つのレイアウトの基本は放射状の千鳥配置であり、すべてオクルージョン損失がないという考えを組み合わせており、結果としてヘリオスタット間の干渉が少なくなり、その結果、大幅に効果が得られます。オクルージョンロスは減少しますが、シャドウオクルージョン効率の値は1に達しません。これは、シャドウロスがまだ存在するためです。また、レイアウト規則により、後続のミラーフィールド領域の最初のミラーリングは常にオクルージョンロスを持ちます。
2.2.2.土地利用率
ミラー フィールドの伝統的な土地利用率は、ヘリオスタットの面積とミラー フィールドの面積の比率として定義され、そのサイズは主にミラー フィールドの密度に依存し、単位土地面積に収容されるヘリオスタットの数を反映します。 25]。しかし、ヘリオスタットは運用中に固定された状態ではなく、方位角やピッチが動くこと、設置やメンテナンスの際に一定の作業スペースが必要であることを考慮し、土地利用状況をより正確に表現するために、固定された状態として再定義されました。状態. サンミラーの作業領域とミラーフィールド領域の比率。このうち、ヘリオスタットの作動面積は、地面と平行な場合の最大回転可能範囲の面積、つまり長方形のヘリオスタットの対角線を有する円の面積に基づいて計算されます。直径として。ヘリオスタット作動領域 Arec、ミラーフィールド領域 Aland、土地利用率 の計算式 [22] は以下のとおりです。
式中、Rmax はミラー フィールドの最大ミラー リング半径です。
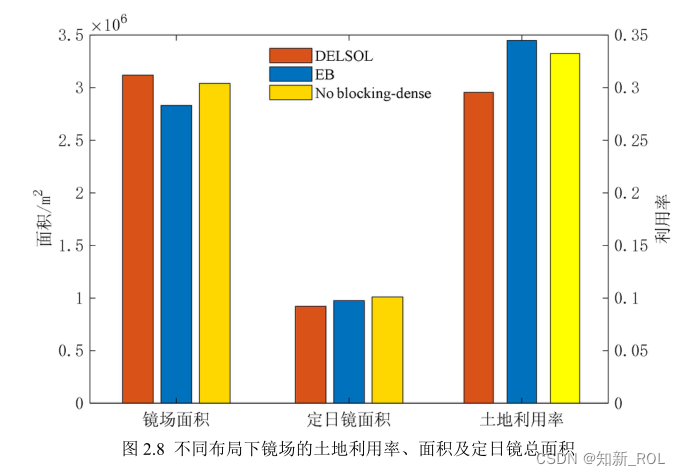
ミラー フィールド モデリングの結果から、3 つのレイアウト モードでのヘリオスタットの数を取得できます。そのうち、DELSOL レイアウトには 4585 個のヘリオスタットが含まれ、EB レイアウトには 5027 個のヘリオスタットが含まれ、ブロック密度のないレイアウトには 4856 個のヘリオスタットが含まれます。さまざまなレイアウトの下でのミラーフィールドの土地利用率、面積、ヘリオスタット総面積データを図 2.8 に示します。見てわかるように、
ブロック密集なしレイアウトの土地利用率が 34.49% で最も高く、EB レイアウトが 33.24% で 2 番目、DELSOL レイアウトが 29.56% で最も低くなります。3 つのレイアウトの半径方向および方位角方向の間隔のレイアウト規則から、ブロッキング密度のないレイアウトはタワー領域近くのミラーフィールドで EB レイアウトよりもコンパクトであるのに対し、DELSOL レイアウトは疎であることを見つけるのは難しくありません。ミラーフィールドの土地利用率にもある程度影響します。同時に、無遮蔽密集レイアウトの密集領域内のヘリオスタットの数は吸熱塔の高さによって決まるため、塔の高さが一定の場合、ミラーフィールドのスケールとしてミラーフィールドの土地利用率は今後も上昇し、EB レイアウトに近くなります。
 (3) ミラーフィールドのエネルギー解析
(3) ミラーフィールドのエネルギー解析
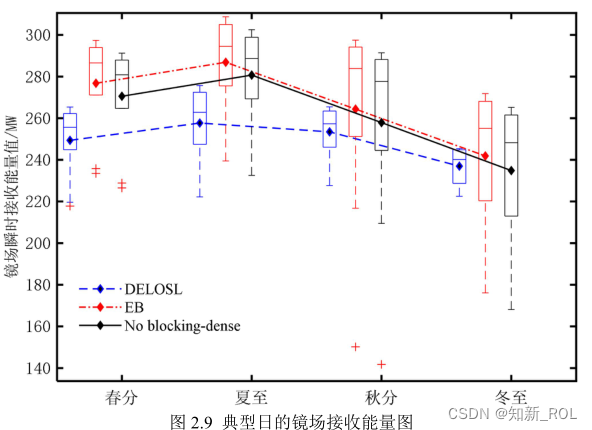
ミラーフィールドの既知の年間平均光効率に基づいて、ミラーフィールドの光学性能をシミュレートする典型的な日を選択し、ミラーフィールドの境界を制限する条件下でどのレイアウトがより多くのエネルギーを生成できるかを調査します。シミュレーションの初期条件は、ミラーフィールドの光学効率シミュレーションの場合と同じです。光学性能シミュレーションにより、図 2.9 に示すような典型的なソーラーミラーフィールド熱吸収タワーの受信エネルギー曲線が得られ、EB レイアウトがすべてのモードの中で最も高いエネルギーを生成し、DELSOL が最も低いことがわかります。 3 つのレイアウトの光学効率の差は大きくないため、EB レイアウトと遮蔽密度のないレイアウトの間のヘリオスタットの数の差が大きい場合、EB ミラーフィールドが受け取るエネルギーはより高くなります。
2.2.3 シャドウオクルージョン効率
(1) 問題のあるヘリオスタットが存在する範囲を特定する
影の遮蔽効率は実際にはヘリオスタットの影効率と遮蔽効率の積である 影の損失は、対象ヘリオスタットの入射光が周囲のヘリオスタットによって遮られることによって生じる損失である. 遮断 損失は、ターゲットのヘリオスタットの反射光が周囲のヘリオスタットによって遮断されることによって引き起こされる損失です [32]。影のオクルージョン効率を解く場合、まず、ターゲット ヘリオスタットに影の損失とオクルージョンの損失を引き起こす、2 次元平面上のヘリオスタットの中心点の可能な範囲 (ターゲット範囲と呼ばれます) を決定する必要があります。その後、まず対象ヘリオスタットのシャドウターゲット範囲内で対象ヘリオスタット以外の他のヘリオスタット(問題ヘリオスタットと呼ぶ)を探索し、特定された問題ヘリオスタットの中から対象ヘリオスタットを見つけ、実際にシャドウロスを引き起こすヘリオスタットの影効率を計算する; 影損失後のヘリオスタットの実際の照明部分の座標点を計算し、オクルージョン対象範囲内で実際に影損失を引き起こす問題ヘリオスタットを見つけて、オクルージョン効率を計算します; 影オクルージョン効率は、影を乗じることによって得られます。ターゲットヘリオスタットの効率と閉塞効率。
影が発生した場合の問題を解決するには、図 3.6 および 3.7 に示すように、ヘリオスタットが配置されているエリアを最大範囲に従って解決する必要があります。図の等価円は、ヘリオスタットが回転するときにヘリオスタットの頂点が XY 平面上に形成する最大の運動軌跡を表します (この運動軌跡は、ヘリオスタットがピッチングせず、水平方向にのみ回転する場合に生成されます。ヘリオスタットの特性長はは等価円の直径)、対象ヘリオスタットの等価円を通る補助線は、XY平面内での入射光線の逆成分に従って問題のヘリオスタットに接し、問題の中心から始まります。ヘリオスタットの円は補助線に平行であり、等しい直線L2は問題のヘリオスタットが存在する可能性のある範囲P1P2P3P4を決定します。

図 3.6 ヘリオスタットが影になっている場合のヘリオスタットの位置

計算を容易にするために、すべてのヘリオスタット中心点の z 座標は 0、対象ヘリオスタットの座標は (x, y, 0) であり、問題のヘリオスタットが存在する領域の計算式は次のように規定されています。影が発生するのは次のとおりです。

同様に、オクルージョンロスが発生した場合の問題ヘリオスタットの取り得る範囲も解くことができ、つまり、入射光を反射光に変えた後、オクルージョンロスが発生した場合の問題となるヘリオスタットの範囲を解くという考え方で解くことができます。影が解消されます。
(2) S&B ロスを解決するプレート投影法
シャドウやオクルージョンロスが発生した場合に問題となるヘリオスタットの範囲を決定した後、その範囲内でヘリオスタット番号を検索し、対応する問題となるヘリオスタットの頂点座標を取得します。反射光は、問題のヘリオスタットをターゲットのヘリオスタット平面に投影し、それがターゲットのヘリオスタットと交差するかどうかによって、問題のヘリオスタットに実際の影があるか、ターゲットのヘリオスタットとの遮蔽損失があるかどうかを判断します。
図 3.8 に示すように、入射プロセス中に、本来ターゲットのヘリオスタットに当たるはずの入射光が、問題のあるヘリオスタットによってブロックされます。このうち、対象のヘリオスタットは M で、影が発生したときに問題のヘリオスタットが配置されている領域を解決した結果、問題のヘリオスタット W1、W2、W3 の 3 台が見つかりました。W3 は M ヘリオスタットの入射光を遮りませんでした。多くのシャドウ オクルージョン効率の計算では、通常、幾何投影法またはモンテカルロ レイ トレーシング法が使用されます。幾何投影法の計算では、この種の効率損失は主に隣接するヘリオスタットによって引き起こされるため、通常、問題となるヘリオスタットはターゲットのヘリオスタットと平行であるとみなして計算されますが、実際にはヘリオスタットのサイズが大きくなります。距離も大きく、問題のヘリオスタットを入射光に沿って目的のヘリオスタット面に投影すると、投影面は長方形ではなく不規則な四角形となるため、この方法の誤差は大きくなります; while in Monte カルロ光線追跡法では、追跡光線を密に設定するほど結果の精度は高くなりますが、逆に計算量や計算時間も増加します [33]。したがって、この論文では、改良された幾何学的投影法を使用してシャドウオクルージョン効率を計算します。具体的な計算プロセスは次のとおりです。

問題ヘリオスタット A の鏡面の中心点は OA(xA, yA, 0)、4 つの頂点は PA1 ~ PA4、対象ヘリオスタット M の中心点は OM(xM, yM, 0)、 4 つの頂点の順序は PM1 ~ PM4 です。まず、問題のヘリオスタットを入射光に沿ってターゲットのヘリオスタット平面に投影する必要があります。入射光と 3 次元平面の式を組み合わせて投影距離、つまり投影点を決定します。 。頂点 PA1 を通り鏡面 M に平行な平面 A* を描くと、この 2 つの平面の立体表現は次のようになります。


点 PA1 を例にとると、元の座標点の x、y、z 値に 3 つの座標軸上の投影距離の対応する成分値を加えたものが、問題平面上のその投影点 *1,A xP になります。 、鏡面 A 上の他の頂点の投影点の座標もこの方法で求めることができます。計算式は次のとおりです。

投影されたミラー A* とターゲットのヘリオスタット M は同一平面上にありますが、それらの頂点座標は依然として 3 次元座標データ (図 3.9 に示すように) であり、交差領域の計算には役立たないため、投影されたミラーはミラーと問題のミラーの座標を同じ平面座標系に転送し、重なっている部分の面積を計算します。頂点座標を空間座標系から、対象となるヘリオスタットミラーの中心点を原点とし、ミラーの法線ベクトル方向をz軸とする新たな座標系、つまり変換された空間座標系のXY平面に変換することができます。座標系はターゲットのヘリオスタット平面であり、変換された座標点の Z 座標はすべて 0 です。
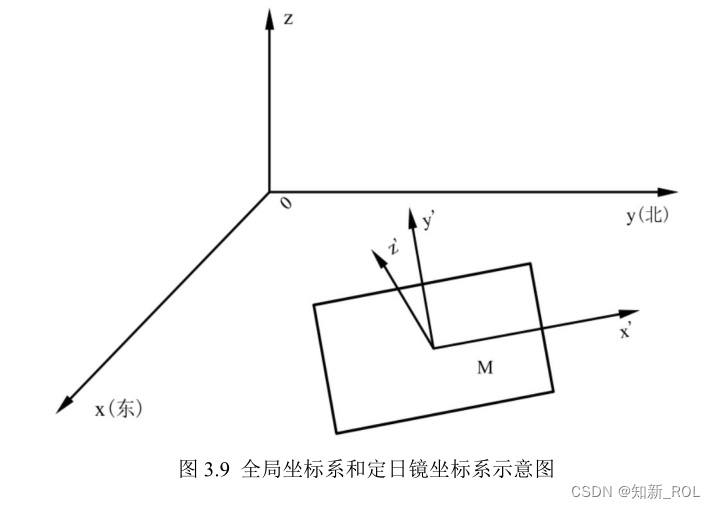
上記の目的は、グローバル座標系を特定の角度で回転させることによって達成できます。具体的には、座標系のオイラー回転変化を計算することができます. まず、世界座標系の 3 つの要素のそれぞれの回転角度を求める必要があります. x 軸、y 軸、回転角度は 、 、 です。座標系が x 軸を中心に回転する場合は、y 軸の正の方向から z 軸の正の方向までの角度、y 軸を中心に回転する場合は、z 軸の正の方向からの角度軸から x 軸の正の方向までの角度、z 軸を中心に回転する場合は、x 軸の正の方向からの角度 軸の正の方向から y 軸の正の方向までの角度。図 3.10 に示すように。

対応する回転行列は次のとおりです。

このとき、回転後の新しい座標系の x、y、z 軸の方向はターゲット座標系と一致しますが、新しい座標系は依然として元のグローバル座標系の原点を原点とし、ターゲット座標系の原点は本質的にはターゲット日付であり、鏡面の中心点であるため、新しい座標で得られた各投影点の新しい座標を減算することで、3次元問題を2次元問題に変換できます。対応するターゲット ヘリオスタット ミラーの中心点からのシステム、つまり、最終的に取得された各点の座標は、z 値がすべて 0 です。

座標変換後、図 3.11 に示すように、対象ヘリオスタットと問題ヘリオスタットを同一平面上に投影した 2 次元模式図が得られます。実際には、太陽高度角が低い場合には、複数のヘリオスタットが同一の対象ヘリオスタットへの入射光を遮りやすく、その際、遮られる部分が重なる場合がある。したがって、多面ヘリオスタットが同時にオクルージョンを引き起こす状況を詳細に計算する必要があります。
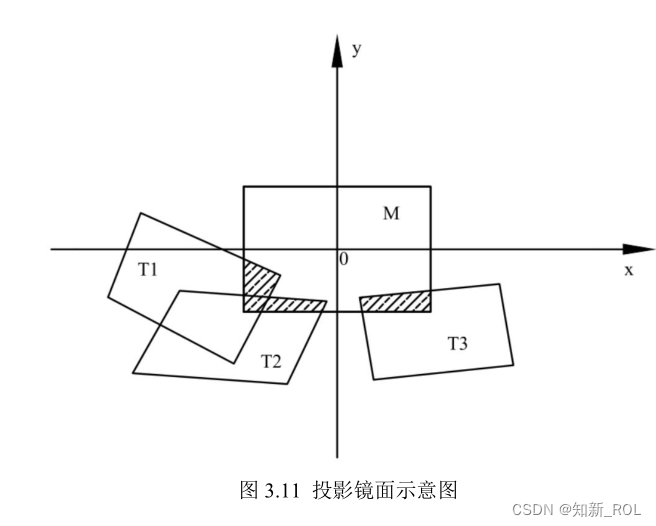
具体的な計算方法は、投影された四角形に基づいてその4辺の数式を求め、各辺と対象ヘリオスタットの4辺との交点を求め、交点を求め、問題となるヘリオスタットの投影を求める。問題のヘリオスタットの投影内のターゲット ヘリオスタットの点とターゲット ヘリオスタットの頂点を計算し、それによって 2 つの間の交点の頂点座標を決定します。ターゲットヘリオスタットに投影された各問題ヘリオスタットのブロックされた部分の頂点座標を連続的に見つけた後、上記の方法を使用してブロックされた部分が互いに交差するかどうかを調べ、重なり合った後のポリゴンの頂点座標を見つけることができます。ブロックの、ブロックされた部分の面積を見つけて影の損失を決定します。オクルージョンロスも上記の方法で解くことができ、
シャドウオクルージョン効率の全体的な解は次のようになります。

