【卒業プロジェクト】3-シングルチップマイコンベースのバスインテリジェント放送到着局操作位置表示システム(模式図+ソースコード+論文)
記事ディレクトリ
ミッションステートメント
主な研究内容:バス GPS 測位システム(原理と実装方法)とバス停、一時停止標識表示システム(ハードウェア回路図、PCB ダイアグラム、シングルチップ マイクロコンピュータが表示するソフトウェア プロセスとプログラム コード)。
このバス運行位置表示システムの要件をまとめると、
より多くの運行条件や広告ワードを保存できること、
操作が簡単であること、停車駅ごとに全駅アナウンス内容を自動放送できること、
LCD駅情報表示ができること、などです。必要;
音声放送が必要 自動と手動の 2 つの機能があり、時刻、カレンダー放送、表示および調整機能を
LCD 画面で一時停止情報とサービス情報を表示できることが必要です。データリンク 回路図プロジェクトファイルソースコードプロジェクトファイル論文低繰り返し率、21355ワード 回路図スクリーンショット
設計書
まとめ
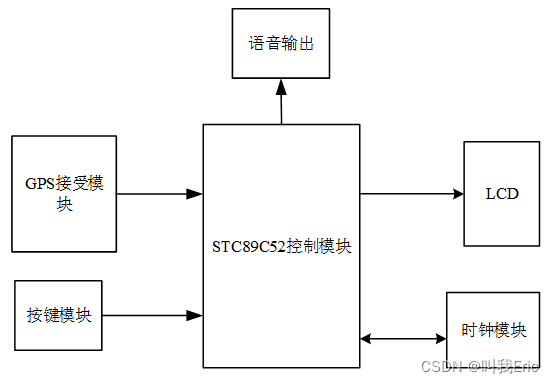
このホワイト ペーパーでは、STC89C52 MCU をメイン コントローラーとして使用し、GPS をグローバル ポジショニング チップとして使用してバスのリアルタイム位置を確保し、DS1302 をシステムのクロック チップとして使用し、LCD12864 を液体として使用します。クロック情報、プラットフォーム情報、バス内のプロンプトなどを表示するシステムのクリスタルディスプレイ。音声チップを介して音声ブロードキャスト機能を実現します。システムの回路設計とソフトウェア システム設計を通じて、システムの機能を確実に実現し、人々の交通手段に利便性をもたらします。従来のバス停通報システムの手動操作の不便さ、誤通報駅が多い、故障時の通報駅がないといった問題を解決します。
フレームワーク アーキテクチャの設計
まえがき 1
第 1 章 はじめに 2
第 1 節 研究の背景 2 第
2 節 国内外の開発動向 2
1. 海外の開発動向 2
2 国内の開発動向 3 第
3 節 本稿の主な研究内容 3
第 4 節 本章のまとめ 4
第 2 章 制度スキーム設計 5
セクション 1 システム ニーズ分析 5
セクション 2 システム設計機能分析 5
セクション 3 システム設計スキーム 6セクション 4
この章のまとめ 7 第
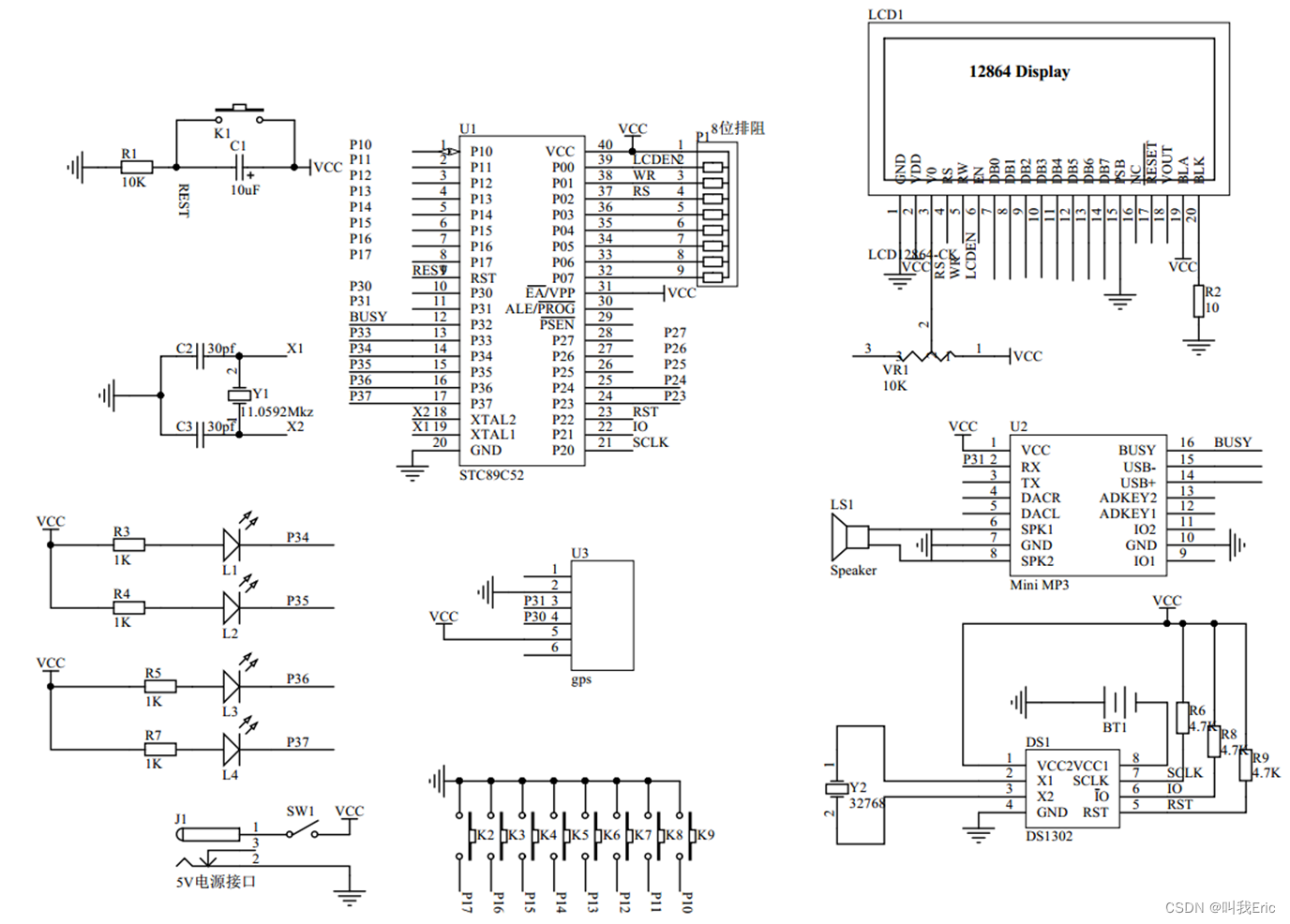
3 章 システム ハードウェア回路設計 8 セクション 1
シングルチップ マイクロコンピュータの最小システム回路設計 8
1. はじめにMCU へ 8
2. MCU の最小システム回路設計 9
セクション 2 電源回路設計 10
セクション 3 ボタン回路設計 10
セクション 4 LED 回路設計 11
セクション 5 液晶ディスプレイ回路設計 12
セクション 6 GPS 回路設計 14
セクション 7 音声放送回路設計15
セクション 8 クロック回路設計 16
セクション 9 システム一般回路図 17
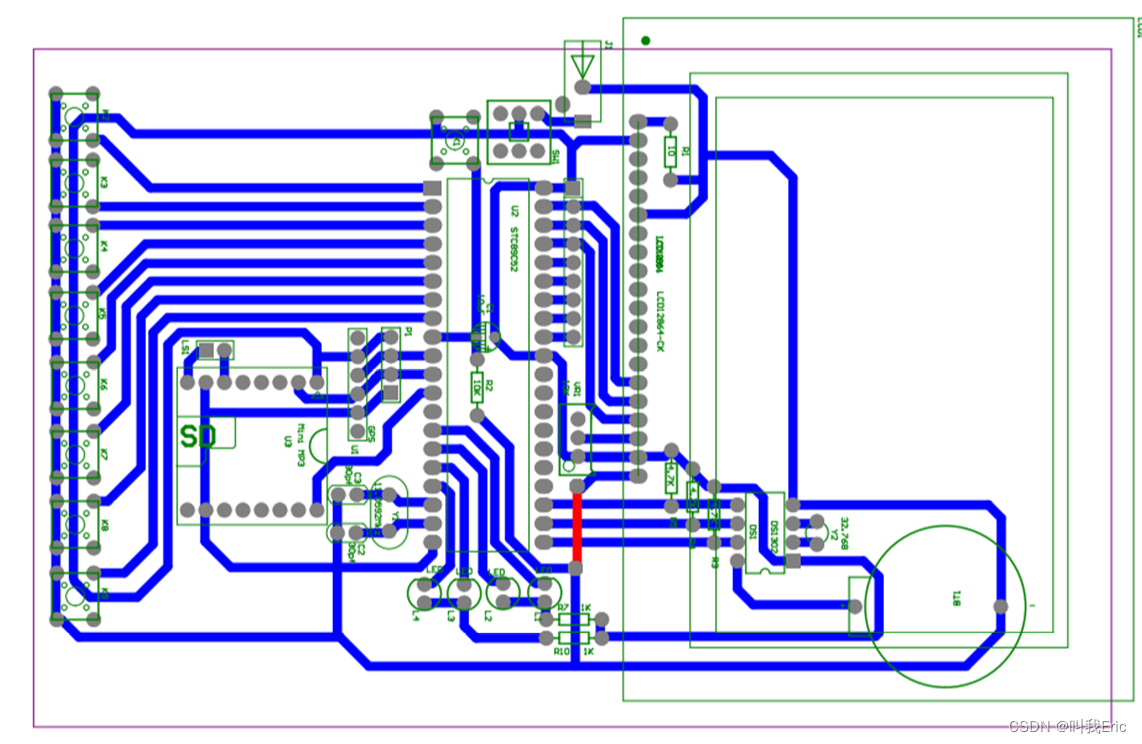
セクション 10 システム PCB 設計 18
セクション 11 この章のまとめ 18
第 4 章 ソフトウェア システム設計 20
セクション 1 Keil ソフトウェアの紹介 20 セクション
2 ソフトウェア設計プロセス 20
セクション 3 LCD プログラム設計22
セクション 4 GPS プログラムの設計 23
5 章 時計プログラムの設計 26
6 章 音声放送プログラムの設計 27
7 章 本章のまとめ 28
まとめ 30
謝辞 32
参考文献 33 付録35 1. 原文の英語 35
2.英訳 38 3. ソースコード 41
設計指示および設計文書
繰り返し率の低い論文、21355語
ソースコード表示
#include <reg51.H>
#include "LCD12864.h"
#include "1302.h"
#include "60S2EEPROM.h"
//站点 GPS
sbit key1=P1^0;
sbit key2=P1^1;
sbit key3=P1^2;
sbit key4=P1^3;
sbit key5=P1^4;
sbit key6=P1^5;
sbit key7=P1^6;
sbit key8=P1^7; //定义按键IO
sbit led0=P3^4;
sbit led1=P3^5;
sbit led2=P3^6;
sbit led3=P3^7; //定义指示灯IO
sbit Music_Busy=P3^2; //定义
bit key1_flag=0;
bit key2_flag=0;
bit key3_flag=0;
bit key4_flag=0;
bit key5_flag=0;
bit key6_flag=0;
bit key7_flag=0;
bit key8_flag=0; //定义按键位变量
uchar Station_Count=1;
sbit Busy=P3^2;
bit position=0;
bit Display_Reversal=0;
uchar state=0; //显示变量
bit s0=0; //数据闪烁变量
uchar ms=0; //定时器用到的变量
//发现两个Bug一个是自动下,到终点站没有自动切换上行、下行
//一个是 自动下 上行站名和语音不照应
uchar sec=0;
uchar sec1=0;
bit memory_flag=0;
uchar Sound=25; //音量大小变量
uchar Station=10; //车站总数变量
bit Mode=0; //等于0代表固化 等于1代表自定义
bit A_M=0;
bit Upstream_Down=1;
uchar count=0;
uint JD_Difference=100; //34.800340,113.499447
uint WD_Difference=100;
//这里预存上行经纬度数据
ulong xdata shangxing_JD_dat[15]={113499052 ,113499041 ,113499048 ,113499059 ,113499064 ,113499064 ,113499096 ,113499091 ,113499080 ,113499085 ,0,0,0,0,0};
ulong xdata shangxing_WD_dat[15]={ 34807299 ,34806564 ,34805795 ,34804901 ,34804046 ,34803403 ,34802381 ,34801711 , 34800910 , 34800152 ,0,0,0,0,0};
//这里预存下行经纬度数据
ulong xdata xiaxing_JD_dat[15]={113499447 ,113499447 ,113499457, 1134994359, 113499451, 113499408, 113499418, 113499391, 113499380, 113499395, 0,0,0,0,0};
ulong xdata xiaxing_WD_dat[15]={347996375 ,34800340, 34800869, 34801600, 34802233, 34802969, 34803852, 34804724, 34805649, 34806550, 0,0,0,0,0};
bit Sound_flag=1;
uchar code xiaxing1[] =" 测试下行A站 ";
uchar code xiaxing2[] =" 测试下行B站 ";
uchar code xiaxing3[] =" 测试下行C站 ";
uchar code xiaxing4[] =" 测试下行D站 ";
uchar code xiaxing5[] =" 测试下行E站 ";
uchar code xiaxing6[] =" 测试下行F站 ";
uchar code xiaxing7[] =" 测试下行G站 ";
uchar code xiaxing8[] =" 测试下行H站 ";
uchar code xiaxing9[] =" 测试下行I站 ";
uchar code xiaxing10[]=" 测试下行J站 ";
uchar code xiaxing11[]=" 测试上行11 ";
uchar code xiaxing12[]=" 测试上行12 ";
uchar code xiaxing13[]=" 测试上行13 ";
uchar code xiaxing14[]=" 测试上行14 ";
uchar code xiaxing15[]=" 测试上行15 ";
uchar code shangxing1[] =" 测试下行J站 ";
uchar code shangxing2[] =" 测试下行I站 ";
uchar code shangxing3[] =" 测试下行H站 ";
uchar code shangxing4[] =" 测试下行G站 ";
uchar code shangxing5[] =" 测试下行F站 ";
uchar code shangxing6[] =" 测试下行E站 ";
uchar code shangxing7[] =" 测试下行D站 ";
uchar code shangxing8[] =" 测试下行C站 ";
uchar code shangxing9[] =" 测试下行B站 ";
uchar code shangxing10[]=" 测试下行A站 ";
uchar code shangxing11[]=" 测试下行11 ";
uchar code shangxing12[]=" 测试下行12 ";
uchar code shangxing13[]=" 测试下行13 ";
uchar code shangxing14[]=" 测试下行14 ";
uchar code shangxing15[]=" 测试下行15 ";
uchar xdata A_dat[20]; //暂存从GPS提取的经纬度数据
uchar xdata B_dat[20]; //暂存从GPS提取的经纬度数据
uchar xdata GPS_dat[100];//暂存GPS模块返回的数据
uchar subscript; //串口数据计数变量
uchar GPS_time=0; //检测GPS是否接收到有效数据变量
float latitude,longitude; //latitude是暂存纬度, longitude是暂存经度数据,这两个数据,是上面的暂存数组计算得到
unsigned long WD_A,JD_B; //这两个变量,是最终现实与进行比较的经纬度数据变量
bit GPS_Write=0; //是否开启GPS校时更新时间数据标志位
uchar xdata NowTime[7]=0; //从GPS返回的数据里面提取出时间数据
bit memory_GPS_flag=1;
uchar Sec_set=0;
uchar Time_Calibration=0; //校准时间标志位
void memory()
{
if(memory_flag)
{
memory_flag=0;
IapEraseSector(0x08000);
IapProgramByte(0x08000,Sound); //记录音量大小变量
IapProgramByte(0x08001,Station); //记录车站总数
if(GPS_Write)IapProgramByte(0x08002,1); //记录自动校时标志 GPS_Write=1,就记录为1
else IapProgramByte(0x08002,0); //记录自动校时标志 GPS_Write=0,就记录为0
if(Mode)IapProgramByte(0x08003,1); //记录固化还是自定义 Mode=1,就记录为1
else IapProgramByte(0x08003,0); //记录固化还是自定义 Mode=0,就记录为0
if(A_M)IapProgramByte(0x08004,1); //记录手动自动模式 A_M=1,就记录为1
else IapProgramByte(0x08004,0); //记录手动自动模式 A_M=0,就记录为0
if(Upstream_Down) IapProgramByte(0x08005,1); //记录上行下行 Station_Count=1,就记录为1
else IapProgramByte(0x08005,0); //记录上行下行 Station_Count=0,就记录为0
// IapProgramByte(0x08006,shangxing_JD_dat[0]/65536/256);
// IapProgramByte(0x08006,shangxing_JD_dat[0]/65536%256);
// IapProgramByte(0x08006,shangxing_JD_dat[0]%256);
}
}
void read_memory()
{
Sound=IapReadByte(0x08000); //读取的记录音量大小变量
// Station=IapReadByte(0x08001); //读取的记录车站总数
if(Sound>30||Station>15) //如果读取出来的数据不对,就进行初始化
{
Sound=25;
Station=5;
}
if(IapReadByte(0x08002)!=0&&IapReadByte(0x08002)!=1) //读取GPS校时标志位
{
GPS_Write=1; //如果读取不对,默认打开
} else GPS_Write=IapReadByte(0x08002); //如果对,进行赋值
if(IapReadByte(0x08003)!=0&&IapReadByte(0x08003)!=1) //读取存储的
{
Mode=0;
}else Mode=IapReadByte(0x08003);
if(IapReadByte(0x08004)!=0&&IapReadByte(0x08004)!=1)
{
A_M=0;
}else A_M=IapReadByte(0x08004);
if(IapReadByte(0x08005)!=0&&IapReadByte(0x08005)!=1)
{
Upstream_Down=0;
}else Upstream_Down=IapReadByte(0x08005);
memory_flag=1; //将读取的数据再次存储
}
void memory_GPS()
{
unsigned char i=0;
if(memory_GPS_flag)
{
memory_GPS_flag=0;
IapEraseSector(0x08200);
for(i=0;i<60;i++)
{
if(i<15)
{
IapProgramByte(0x08200+i*4,shangxing_JD_dat[i]/16777216%256);
IapProgramByte(0x08200+i*4+1,shangxing_JD_dat[i]/65536%256);
IapProgramByte(0x08200+i*4+2,shangxing_JD_dat[i]/256%256);
IapProgramByte(0x08200+i*4+3,shangxing_JD_dat[i]%256);
}
else if(i<30)
{
IapProgramByte(0x08200+i*4,shangxing_WD_dat[i-15]/16777216%256);
IapProgramByte(0x08200+i*4+1,shangxing_WD_dat[i-15]/65536%256);
IapProgramByte(0x08200+i*4+2,shangxing_WD_dat[i-15]/256%256);
IapProgramByte(0x08200+i*4+3,shangxing_WD_dat[i-15]%256);
}
else if(i<45)
{
IapProgramByte(0x08200+i*4,xiaxing_JD_dat[i-30]/16777216%256);
IapProgramByte(0x08200+i*4+1,xiaxing_JD_dat[i-30]/65536%256);
IapProgramByte(0x08200+i*4+2,xiaxing_JD_dat[i-30]/256%256);
IapProgramByte(0x08200+i*4+3,xiaxing_JD_dat[i-30]%256);
}
else if(i<60)
{
IapProgramByte(0x08200+i*4,xiaxing_WD_dat[i-45]/16777216%256);
IapProgramByte(0x08200+i*4+1,xiaxing_WD_dat[i-45]/65536%256);
IapProgramByte(0x08200+i*4+2,xiaxing_WD_dat[i-45]/256%256);
IapProgramByte(0x08200+i*4+3,xiaxing_WD_dat[i-45]%256);
}
}
}
}
void read_GPS()
{
unsigned char i=0;
unsigned long flsh1=0,flsh2=0,flsh3=0,flsh4=0;
for(i=0;i<60;i++)
{
if(i<15)
{
flsh1=IapReadByte(0x08200+i*4);
flsh2=IapReadByte(0x08200+i*4+1);
flsh3=IapReadByte(0x08200+i*4+2);
flsh4=IapReadByte(0x08200+i*4+3);
shangxing_JD_dat[i]=flsh1*16777216+flsh2*65536+flsh3*256+flsh4;
}
else if(i<30)
{
flsh1=IapReadByte(0x08200+i*4);
flsh2=IapReadByte(0x08200+i*4+1);
flsh3=IapReadByte(0x08200+i*4+2);
flsh4=IapReadByte(0x08200+i*4+3);
shangxing_WD_dat[i-15]=flsh1*16777216+flsh2*65536+flsh3*256+flsh4;
}
else if(i<45)
{
flsh1=IapReadByte(0x08200+i*4);
flsh2=IapReadByte(0x08200+i*4+1);
flsh3=IapReadByte(0x08200+i*4+2);
flsh4=IapReadByte(0x08200+i*4+3);
xiaxing_JD_dat[i-30]=flsh1*16777216+flsh2*65536+flsh3*256+flsh4;
}
else if(i<60)
{
flsh1=IapReadByte(0x08200+i*4);
flsh2=IapReadByte(0x08200+i*4+1);
flsh3=IapReadByte(0x08200+i*4+2);
flsh4=IapReadByte(0x08200+i*4+3);
xiaxing_WD_dat[i-45]=flsh1*16777216+flsh2*65536+flsh3*256+flsh4;
}
}
}
void Uart1Data(uchar dat) // 串口发送一个字节数据
{
SBUF=dat;
while(!TI);
TI=0;
}
void UartData_Byte(uchar *byte) //串口发送一串数据
{
while(*byte != '\0')
{
Uart1Data(*byte++);
}
}
void delay(uint dat)
{
while(dat--);
}
uchar verify_GPSdat(uchar *dat)//读取服务器返回的数据
{
uchar i=0;
while(*dat != 0){
if(*dat != GPS_dat[i]){
return 0;
}
i++;
dat++;
}
GPS_dat[0]=0;
return 1;
}
void Send_Hex(unsigned char *p,unsigned char num)
{
while(num--) //剩余发送的字符数
{
SBUF = *p; //将要发送的数据赋给串口缓冲寄存器
while(!TI);//等待发送结束
TI = 0; //软件清零
p++; //指针加一
}
}
void DoSum(unsigned char *Str,unsigned char len)//校验位计算
{
unsigned int xorsum = 0;
unsigned char i;
for(i=1;i<len;i++)
{
xorsum = xorsum + Str[i];
}
xorsum = 0 - xorsum;
*(Str+i) = (unsigned char)(xorsum >> 8);
*(Str+i+1) = (unsigned char)(xorsum & 0x00ff);
}
void Send_Appoint_Music(unsigned char dat )
{ //7E FF 06 03 00 00 01 FE F7 EF
unsigned char Table[10];
Table[0] = 0x7E;
Table[1] = 0xFF;
Table[2] = 0x06;
Table[3] = 0x03; //指令
Table[4] = 0x00;
Table[5] = 0x00;
Table[6] = dat;
DoSum(Table,7);//计算校验码
Table[9] = 0xEF;//结束码
Send_Hex(Table,10);//发送指令数据
}
void Send_Appoint_Sound(unsigned char dat)
{
if(Music_Busy==0&&s0)
{
unsigned char Table[10];
Table[0] = 0x7E;
Table[1] = 0xFF;
Table[2] = 0x06;
Table[3] = 0x06; //指令
Table[4] = 0x00;
Table[5] = 0x00;
Table[6] = dat;//音量
DoSum(Table,7);//计算校验码
Table[9] = 0xEF;//结束码
Send_Hex(Table,10);//发送指令数据
}
}
void read_time1() //实时读取DS1302中的时间数据
{
uchar i;
if(state==0)
{
time_data[0]=ds1302read(0x81);
time_data[1]=ds1302read(0x83);
time_data[2]=ds1302read(0x85);
time_data[3]=ds1302read(0x87);
time_data[4]=ds1302read(0x89);
time_data[5]=ds1302read(0x8D);
time_data_1[0]=time_data[0]/16*10+time_data[0]%16;
time_data_1[1]=time_data[1]/16*10+time_data[1]%16;
time_data_1[2]=time_data[2]/16*10+time_data[2]%16;
time_data_1[3]=time_data[3]/16*10+time_data[3]%16;
time_data_1[4]=time_data[4]/16*10+time_data[4]%16;
time_data_1[5]=time_data[5]/16*10+time_data[5]%16;
if(time_data_1[0]>59)
{
ds1302write(0x8e,0x00);
ds1302write(0x80,0x80);
ds1302write(0x80,0);
ds1302write(0x8e,0x80);
}
ds1302write(0x8e,0x80);
}
else
{
ds1302write(0x8e,0x00);
ds1302write(0x80,0x80);
for(i=0;i<7;i++)
{
time_data_2[i]=time_data_1[i]/10;
time_data_3[i]=time_data_1[i]%10;
}
for(i=0;i<7;i++)
{
time_data_4[i]=time_data_2[i]*16+time_data_3[i];
}
ds1302write(0x80,time_data_4[0]);
ds1302write(0x82,time_data_4[1]);
ds1302write(0x84,time_data_4[2]);
ds1302write(0x86,time_data_4[3]);
ds1302write(0x88,time_data_4[4]);
ds1302write(0x8C,time_data_4[5]);
}
}
//显示函数
void Display()
{
uchar dat=0;
if(state<=6)
{
LCD12864_pos(0,0);
if(state==1&&s0) LCD12864_writebyte(" ");
else {
LCD12864_writebyte("20");
LCD12864_write(1,0x30+time_data_1[5]/10);
LCD12864_write(1,0x30+time_data_1[5]%10);
}
LCD12864_writebyte("-");
if(state==2&&s0) LCD12864_writebyte(" ");
else {
LCD12864_write(1,0x30+time_data_1[4]/10);
LCD12864_write(1,0x30+time_data_1[4]%10);
}
LCD12864_writebyte("-");
if(state==3&&s0) LCD12864_writebyte(" ");
else {
LCD12864_write(1,0x30+time_data_1[3]/10);
LCD12864_write(1,0x30+time_data_1[3]%10);
}
//配置定时0用作常规定时,使用定时器1用作串口1波特率发生器,9600
void TimeInt(void) //系统定时器初始化配置
{
TMOD=0x21; //定义两个定时器
TH1=0xFD;
TL1=0xFD; //定时器1用于产生波特率 晶振11.0592
TL0 = 0x00; //设置定时初值
TH0 = 0x4C; //设置定时初值
SCON=0x50;
PCON=0;
EA=1; //开总中断
ES=1; //ES-串行中断允许控制位 ES = 1 允许串行中断。
TR1=1; //启动定时器开始工作
ET0=1;
TR0=1;
}