記事のディレクトリ
序文
スペースを削減するために、各モジュールの初期化はモジュール構成にあり、いつでもブログを読むことができ、関数内の関数は表示されなくなり、スクリーンショットのみが表示されます。
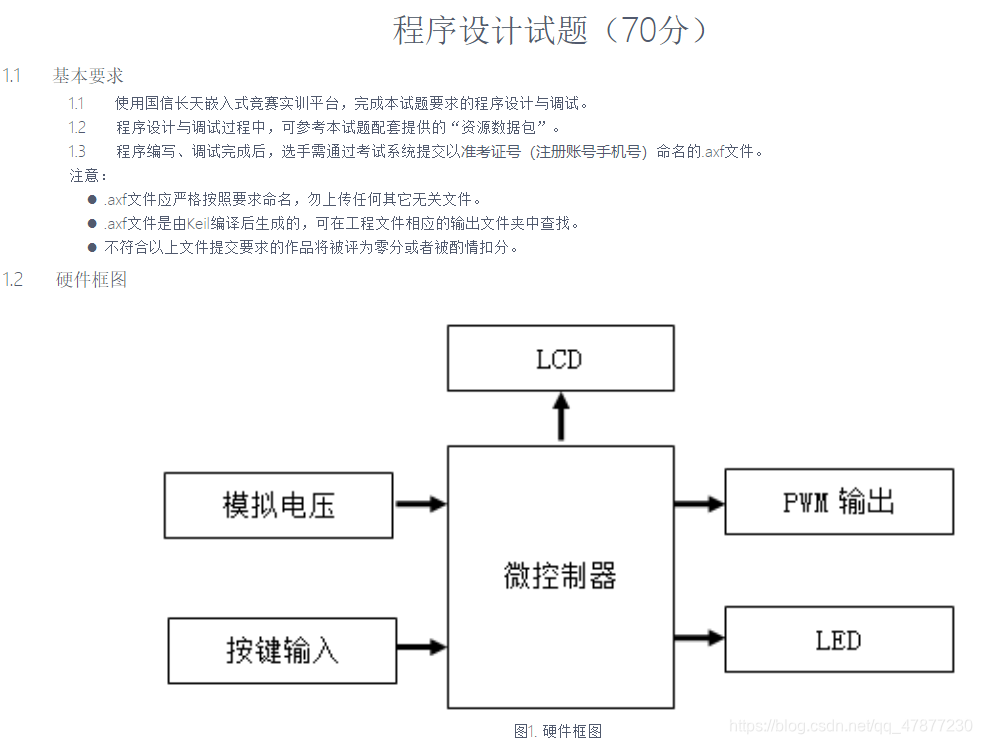
1.トピック
一般的に、シミュレーションコンテストは非常に単純であり、今年のテストの質問は単純である(純粋に推測)ことを示している可能性があります
。それでも、テストの準備は慎重に行う必要があります。
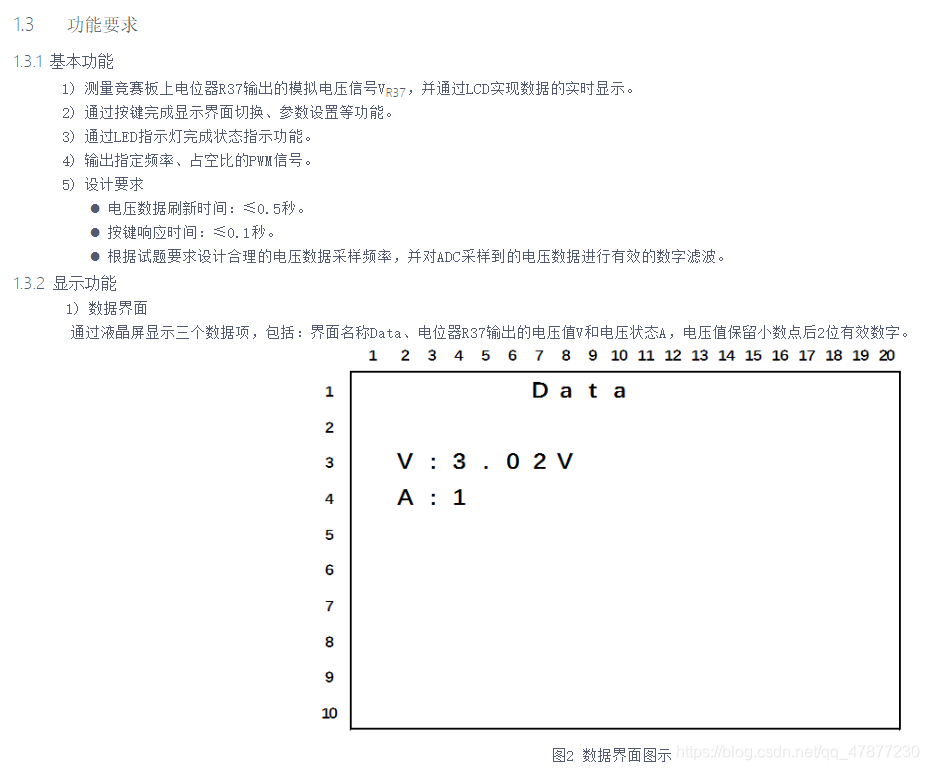
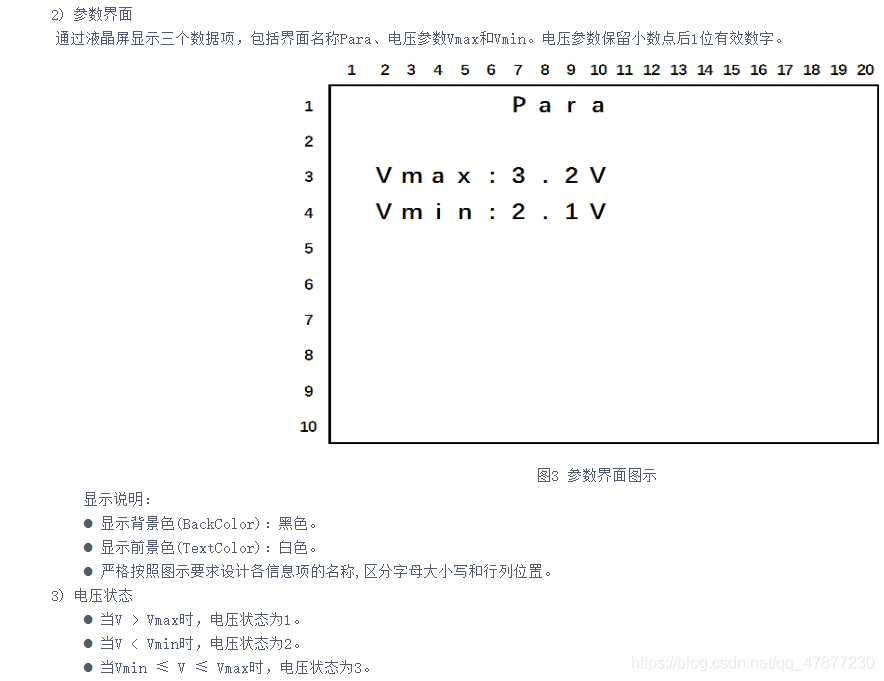
機能概要
2.モジュールの初期化と機能分析
1.モジュールの初期化
必要なモジュール:LCD、4つのボタン、LED、ADC(PB15)、TIM
2.モジュール機能分析
LCD:ディスプレイ-----》 Display();
ボタン:パラメータの調整-----》 KEY_Handle(); KEY_Scan();
LED:プロンプト機能-----》 LED();
ADC(PB15):温度センサーから出力された信号を読み取ります-----》 Get_ADC();
TIM(PA1):異なる周波数の方形波を出力します
3、関数の実装
1.void Display(void);
void Display(void)
{
if(mode == 0)
{
LCD_DisplayStringLine(Line1," Data");
sprintf((char *)arr, " V:%.2fV",Volt);
LCD_DisplayStringLine(Line3,arr);
sprintf((char *)arr, " A:%d",Condition);
LCD_DisplayStringLine(Line4,arr);
}
else if(mode == 1)
{
LCD_DisplayStringLine(Line1," Para");
sprintf((char *)arr, " Vmax:%.1fV",Volt_Range[1]);
LCD_DisplayStringLine(Line3,arr);
sprintf((char *)arr, " Vmin:%.1fV",Volt_Range[0]);
LCD_DisplayStringLine(Line4,arr);
}
}
2.uint8_t KEY_Scan(uint8_tモード);
uint8_t KEY_Scan(uint8_t mode)
{
static uint8_t flag=1;
if(mode) flag = 1;
if(flag &&(KEY_B1 == 0 || KEY_B2 == 0 || KEY_B3 == 0 || KEY_B4== 0 ))
{
HAL_Delay(10);
flag = 0;
if (KEY_B1 == 0) return B1_Press;
else if (KEY_B2 == 0) return B2_Press;
else if (KEY_B3 == 0) return B3_Press;
else if (KEY_B4 == 0) return B4_Press;
}else if(KEY_B1 == KEY_B2 == KEY_B3 == KEY_B4 == 1) flag = 1;
return 0;
}
3.void KEY_Handle(uint8_t key);
3つのボタンについて、異なるボタンは異なる操作に対応します。
このシミュレーションの質問では、誤操作防止は1つだけです。B1が押されたときの電圧範囲を記録するだけで済みます。
void KEY_Handle(uint8_t key)
{
static float i, j;
if(key == B1_Press)
{
if(mode == 0)
{
i = Volt_Range[0];
j = Volt_Range[1];
mode = 1;
}
else
{
if(Volt_Range[1] - Volt_Range[0] < 0.5f)
{
Volt_Range[0] = i;
Volt_Range[1] = j;
}
mode = 0;
}
LCD_Clear(White);
}
else if(key == B2_Press && mode == 1)
{
if(Volt_Range[1] == 0)
Volt_Range[1] = 3.3f;
else
Volt_Range[1] = Volt_Range[1] - 0.1f;
}
else if(key == B3_Press && mode == 1)
{
if(Volt_Range[0] == 3.3f)
Volt_Range[0] = 0;
else
Volt_Range[0] = Volt_Range[0] + 0.1f;
}
}
4.uint16_t Get_ADC(void);
電圧値を読み取ります。電圧値はGet_ADC()* 3.3 / 4096です。
uint16_t Get_ADC(void)
{
uint16_t temp = 0 ;
HAL_ADC_Start(&hadc2);
temp = HAL_ADC_GetValue(&hadc2);
HAL_ADC_Stop(&hadc2);
return temp;
}
5.int main(void);

初期化;
LCD_Init();
LCD_Clear(White);
LCD_SetTextColor(Black);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
HAL_ADC_Init(&hadc2);
Volt_Range[0] = 1;
Volt_Range[1] = 3;
Condition = 1;
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_8|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
while(1);
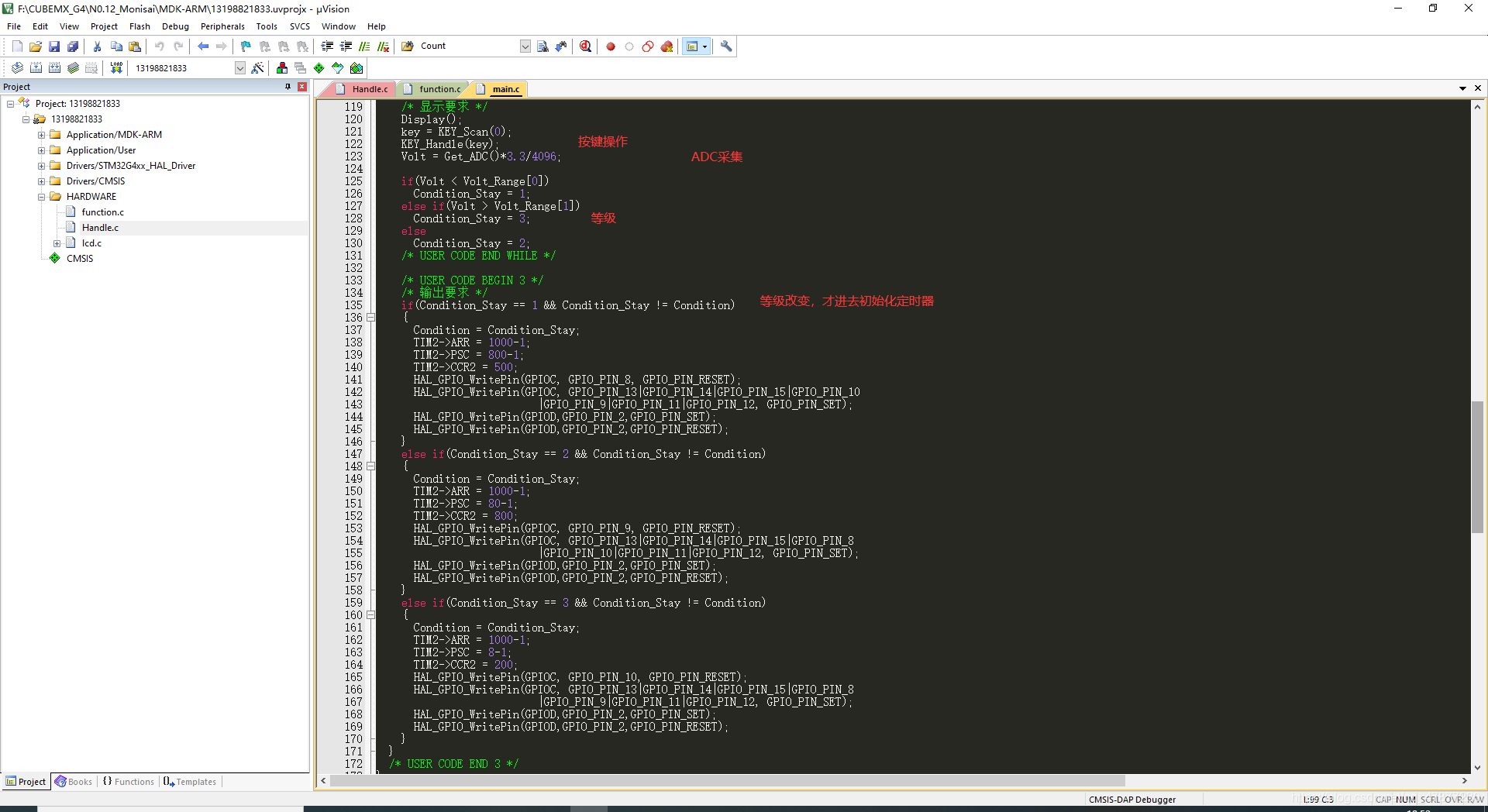
タイマー出力PWM波の説明を次に示します
。ARRはロード値、PSCはプリスケーラー係数、CCR1はチャネル1の比較値です。
つまり、CCR1がハイ(ロー)を出力するまでカウントされ、CCR1からARRは次のようになります。低(高)、ここでは構成モードによって異なります
Display();
key = KEY_Scan(0);
KEY_Handle(key);
Volt = Get_ADC()*3.3/4096;
if(Volt < Volt_Range[0])
Condition_Stay = 1;
else if(Volt > Volt_Range[1])
Condition_Stay = 3;
else
Condition_Stay = 2;
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* 输出要求 */
if(Condition_Stay == 1 && Condition_Stay != Condition)
{
Condition = Condition_Stay;
TIM2->ARR = 1000-1;
TIM2->PSC = 800-1;
TIM2->CCR2 = 500;
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_10
|GPIO_PIN_9|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
else if(Condition_Stay == 2 && Condition_Stay != Condition)
{
Condition = Condition_Stay;
TIM2->ARR = 1000-1;
TIM2->PSC = 80-1;
TIM2->CCR2 = 800;
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
else if(Condition_Stay == 3 && Condition_Stay != Condition)
{
Condition = Condition_Stay;
TIM2->ARR = 1000-1;
TIM2->PSC = 8-1;
TIM2->CCR2 = 200;
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_10, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
総括する
シミュレーションコンテストに参加するのは初めてですが、ジオはまだ違う気がします。
私は昨日それを終えました、私は書く時間がありませんでした、私を許してください、へへ。
それのように、私は最近それが好きではありません、それはさわやかです。┭┮﹏┭┮