02EMGに基づくハイブリッド制御方法の概要
EEG-EMGに基づくハイブリッド制御インターフェースの基本的な考え方は、制御方法でEEG信号とEMG信号を融合することです。信号の融合はさまざまな方法で行うことができ、特定のアプリケーションやユーザー機能などの要因に依存する可能性があります。このハイブリッドインターフェースでは、EEG信号とEMG信号を組み合わせて、ハイブリッド方式のアプリケーションは、単純なゲーム制御アプリケーションから義手を制御するアプリケーションまでさまざまです。
このレビューの主な目的は、プロテーゼや外骨格などのバイオロボットのアプリケーションを研究することであるため、範囲はバイオロボットでのハイブリッドEEG-EMGメソッドのアプリケーションに限定されます。先に述べたように、特定の制御方法でEMG信号とEEG信号を組み合わせて、効果を高める方法はたくさんあります。
一般的に、EEGまたはEMG信号は、補助機器のコンポーネントなど、アプリケーションのさまざまな部分を操作するために使用できます。または、これらすべてを組み合わせることができます。後者を使用すると、ユーザーは好みに応じて1つの制御信号から別の制御信号にスムーズに切り替えることができます。
特定のアプリケーション/デバイス(プロテーゼ、外骨格、車椅子など)や入力処理方法など、バイオロボットアプリケーションでEEG-EMGハイブリッド制御方法を分類するために使用できる方法がいくつかあります。デュアル入力システムとして、ハイブリッドEEG-EMGインターフェースは入力信号を同時にまたは順次処理できます。
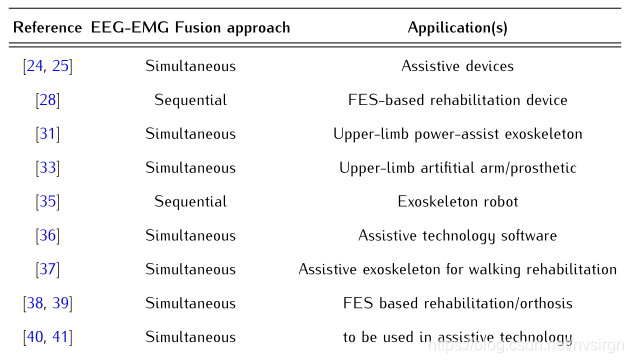
この総説では、バイオロボットアプリケーションにおけるハイブリッド制御手法の各研究を2つのカテゴリに分類します。入力処理手法が同時か順次かによって、EEG-EMG手法の比較はこの記事で説明したものとは異なります。ハイブリッド法の重要な特徴を表1にまとめています。重要なのは、EEG-EMG信号の融合方法が何であれ、ハイブリッド法はEMGまたはEEG信号を単独で使用する方法よりも高い効果を得ることができるということです。
表1いくつかの異なるEMG-EEGハイブリッド法の比較
バイオロボットアプリケーションでのEMGベースの制御法の適用における問題を補償するためにハイブリッド法を使用する研究報告はほとんどありません。EMG信号は、プロテーゼや外骨格としてよく使用されます。または制御入力車椅子などの機器では、障害者、体の弱い人、高齢者、負傷者の筋肉にまだ活動が残っていることがあるため、EMG信号に基づく制御方法では解決すべき問題がいくつかあります。
EMG信号のみを使用する場合に発生する可能性のある問題の1つは、筋肉の疲労です。これは、通常のレベルの筋肉収縮に加えて、EMGの振幅と周波数スペクトルにも影響します。特に加齢に伴い、骨格筋線維のサイズが小さくなり、筋力が低下するため、高齢者は急激に筋力や倦怠感を失う傾向があります。これらの高齢者の心身の状態は日々変化しており、身体の倦怠感により筋肉の倦怠感が生じる場合もありますが、その場合は筋電図による筋疲労のコントロール方法を設計する必要があります。 。
いくつかの試みを除いて、EMGに基づく制御方法を開発する研究報告はほとんどありません。これらの方法は筋肉疲労に強いですが、制御方法では、EEG信号を追加の入力信号として使用できます。 EMG信号だけに頼るのではなく、筋肉の疲労。
ユーザーの可用性と信頼性に応じて、筋肉と脳の信号をハイブリッドBCIに融合するこの試みは、手動制御タスクでEMGとEEGを並行して使用し、16個のEEGチャネルEEG信号によって測定され、筋電活動を記録することが報告されています。左右の前腕の屈曲と伸展の4つのチャネルの。
EMGとEEGの分類器出力に基づいて、最初の方法では、等平衡融合重みを使用してEMGとEEG分類器の出力を結合します。2番目の方法では、ベイジアン融合法をテストしました。単独で使用されるEMGおよびEEG分類器の有効性がテストされ、EMGとEMGの融合の4つの条件が、筋肉疲労のさまざまなレベルに従って考慮されました。
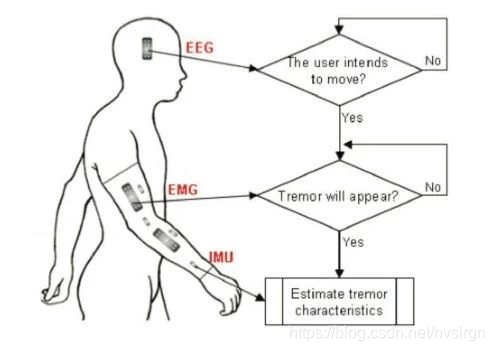
図統合センサーは、振戦抑制に基づいて機能的電気刺激(FES)を駆動します。
実験では、12人の健康な被験者(3人の被験者を削除)で実験を行いました。この研究では、筋電図活動の正解率は87%です。脳波活動の正解率は73%です。最初のハイブリッドEMG-EEG分類器融合法の精度は91%に向上し、ベイジアン融合法はEMG信号の50%を使用して92%の精度を達成します。実験結果は、EEGおよびEMG入力を使用する場合とは異なることを示しています。単独で。状況と比較して、ジョイント法の分類精度が向上します。
振戦は、筋電図信号に基づく一般的な制御方法でよく知られている問題です。振戦は、特に高齢者によく見られる病気です。特に上肢の振戦のある人では、体の一部がリズミカルに揺れます。日常生活動作が困難です。 。これらの意図しない運動によって生成されたEMG信号は、ユーザーの実際の運動意図を表すものではありません。したがって、外骨格などの生体ロボットの制御方法におけるチャタリング効果を特定して排除することは非常に重要です。
振戦を抑制し、パワーアシストロボットを使用する際の不要な振動や動きを回避するためのアクティブなウェアラブル外骨格の使用など、いくつかの研究。しかし、振戦を抑制するための新しいマルチモーダルセンサー融合法が最近報告されました。この研究では、機能的電気刺激(FES)によって上肢の震えを補償できるマルチモーダルBCIを介したソフトウェアラブルロボットを提案します。
本研究では、EEG、EMG、慣性センサー信号に基づいて、全自動ウェアラブルロボットを駆動する制御信号を生成します。この場合、使用するハイブリッド融合法はシーケンス融合法に分類できます。
この方法では、最初のステップは、C3、CZ、およびC4電極の表面ラプラシアンフィルターを使用して、記録されたEEG信号をフィルター処理し、被験者の意図的な自発的な動きを特定することです。検出されると、EMG信号を使用して振戦の開始を識別し、最後に慣性測定ユニット(IMU)を使用して振戦のパラメーターを追跡します。
この写真では、EEGおよびEMG信号を

使用して、神経振戦の12人の患者でセンシング支援上肢強度支援実験を実行しています。評価のために実験段階からのデータを使用すると、平均マグニチュード推定誤差は0.001 rad / sであり、典型的な振戦周波数範囲です。内の周波数推定値が最終出力として使用されます。最終結果に加えて、この研究では、自発的で震えるモーターコンポーネントの検出と特性評価の精度、特に堅牢性を向上させるために、さまざまなモードの融合と統合の重要性も示しています。
通常の状況では、EMG信号は知覚補助機能を判断または検証するために使用され、パワーアシスト外骨格ロボットは各タスクに従って教えられます。ただし、場合によっては、EMG信号の変化だけではこの判断を下すことができません。この問題を克服するために、EEGおよびEMG信号と組み合わせた上肢のパワーアシスト制御方法が提案されています.256高密度電極システムを使用してEEG信号を測定し、上肢の16の筋肉のEMG信号を記録します。パワーアシストロボットは、周囲の環境からの情報に基づいて(ステレオカメラ、超音波センサーなどを使用して)知覚支援を実行します。
この研究の目新しさは、EMG信号に加えて、EEG信号も実行された知覚支援の有効性を決定するために使用されることです。この方法では、EMG信号とEEG信号は直接融合されませんが、EMG信号とEEG信号は同時に考慮され、知覚支援が実行されるかどうかが決定されます。
4人の被験者に対して2つの実験を行い、EMGのみを使用し、EEG-EMG法と組み合わせて正誤の認知率を計算しました。最初の実験では、すべての被験者の知覚補助判断の平均精度は77.5%と88.75%でしたが、EMG単独法とEEG-EMG組み合わせ法はそれぞれ77.5%と88.75%でした。2番目の実験では同じパラメーターの下で。 、単一EMG法と混合EEG-EMG法の結果はそれぞれ57.5%と80%でした。EEGとEMG信号の組み合わせは、知覚支援効果の判断を改善することができます。
特定の個人がバイオロボットデバイスをガイドするための制御信号を生成する能力を欠いている場合、EEG-EMGハイブリッド制御方法が効果的です。たとえば、肘の上の切断者の場合、前腕、手首、および手の動きを生成するために使用される筋肉は存在しません。腕の動き(34度)の追加の電気信号が提案されます。前腕と手首の動きは推定されます。しかし、この方法では日常生活のさまざまな活動を推定することは容易ではありません。
したがって、肘の上の切断者の義足を制御するために、脳からの信号が提案されます。人工腕の前腕の回内/回外運動は、高密度EEGセンサーアレイ(256個のEEG電極)によって測定されたEEG信号によって制御され、肘の屈曲および伸展運動は、残りの2つによって制御されます。頭と三頭筋の脳波信号。義肢を制御する肘の上の切断者のEEGおよびEMG信号の同期処理は、次の図に示すように表すことができます。
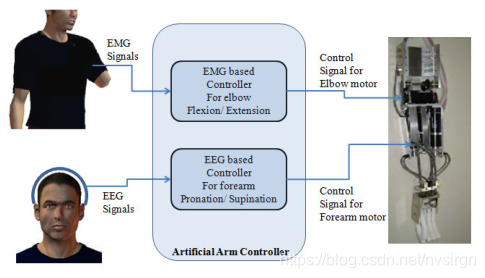
この方法では、人工ニューラルネットワークを使用してEEG信号に従って前腕の動きをデコードし、ファジー神経モディファイアを備えたEMGコントローラを使用して、人工腕の肘関節の動きを生成します。以前の研究と比較して、EEG-EMGに基づくハイブリッド制御方法は、追加の自由度(前腕回内/回外)制御チャネルを導入することにより、その潜在的な利点を示しています。
他のセンサー(モーションセンサーや触覚センサーなど)をハイブリッドEEG-EMG法に統合する可能性について議論し、多次元情報融合に基づいて外骨格ロボットのインテリジェント知覚システムを設計する試みを報告することは興味深いことです。本研究では、EEG、EMG、足底圧センサー、光ファイバーモーションキャプチャシステム情報融合を使用した外骨格ロボット知覚システムアーキテクチャを提案します。設計の基本的なフレームワークはEEGを使用することです。信号は、人体の動きの意図、および人体の下肢の4つの主要な筋肉のEMG信号は、人体の動きのモード(ランニングまたはウォーキング)を識別するために使用されます。光ファイバモーションキャプチャシステムは、人体の位置と姿勢を測定するために使用されます。外骨格ロボット知覚システムのフレームワーク内で、各測定信号は順次処理されます。設計の枠組みでは、EEG信号とEMG信号は直接組み合わされていません。
一部の研究グループは、生物学的ロボットの外骨格などのアプリケーションの制御方法にEEGおよびEMG信号を統合することを提案しています。ウォーカープロジェクトを念頭に置いて、研究者は主に人間の動きに関連するEMGおよびEEG信号に基づくブレインコンピューター統合方法を提案しました。
EEG信号とEMG信号を統合するために、動的リカレントニューラルネットワーク(DRNN)の設計が提案されています。このネットワークは、歩行を模倣する肩の筋肉のEMG信号と、歩行中の自発的なEEG信号の両方を受信できます。歩行リハビリテーションのための補助外骨格の包括的な方法は、運動障害のある障害者を助けるために使用されます。ハイブリッドBCIシステムのFES制御方法に基づく同様の推奨事項は、脳卒中後の患者の上肢のリハビリテーションについても報告されています。本研究で提案したように、ハイブリッド法では、EEGパターンを使用して特定の患者の運動意図を認識し、患者が自発的に試みた特定のEMG機能が検出された場合にのみ、FESによって筋収縮が発生します。
著者は、実験室での健康なボランティアの予備実験がこの方法の実現可能性を示したと結論し、脳卒中患者とリハビリテーションの専門家の参加を得て、より多くのテストが実施されるでしょう。
同時に、同じ研究チームは、脳卒中後の上肢のリハビリテーションをサポートするために、BCIベースのマルチモーダルフィードバックデバイスも提案しました。この方法では、3つの16チャネル生体信号増幅器を使用してEEG信号を測定し、上肢の筋肉(デジタル屈筋と伸筋、上腕二頭筋と上腕三頭筋)のEMG信号を記録します。2つの信号は同時に並列処理パイプラインに送信され、EEGとEMG信号を処理します。 。EEGとEMGが同時に現れる場合(運動皮質と生理的筋肉モードを含む)にのみ、融合モジュールはFESの活性化を可能にします。これらの実験では、患者はFES装具の助けを借りて提案されたハイブリッドBCIによって手が制御されていることを観察できます。
上記の方法に加えて、BCIでのハイブリッドセンサーフュージョンの概念設計を提案している文書はほとんどありません。これらの設計では、EEG信号とEMG信号だけでなく、単純なスイッチやモーションセンサー信号などの他の入力も組み合わせる必要があります。 、情報を改善するため。伝送速度、可用性、信頼性など。これらの方法の中で、ハイブリッドBCIは、支援技術システムで最も信頼性の高い信号を提供するために、ユーザーの好みや可用性、または融合チャネルの組み合わせに従って入力チャネルを決定する必要があります。
これは単純なバイオロボットアプリケーションではありませんが、重度の障害を持つエンドユーザーと通信するためのP300ブレインコンピューターインターフェイスに基づくハイブリッド制御を報告した研究について議論したことは興味深いことです。この研究の主な目的は、支援技術ソフトウェアのハイブリッドBCIインターフェースを制御するために、EEG信号からの筋電図(EMG)およびP300機能の使用を評価することです。8つのEEGチャネル(10-20システムによる)と2つのEMG電極を使用して、EEGおよびEMG信号を測定しました。
定量的パフォーマンス結果の表報告研究比較

実験は、6人の健康な被験者と1人の重度のジスキネジアのエンドユーザーによって実施されました。実験中、参加者は、システムを使用して、混合タスクなしと混合タスクの2つの状況で、3つの事前定義された単語(21文字)をオンラインで綴るように求められました。
非混合タスクでは、この方法はBCI制御のみを使用しますが、混合タスクでは、EMG制御信号を使用してスペルタスクのエラーを排除します。最後に、ハイブリッドBCIメソッドの効率を評価するために、時間、エラー率、およびユーザーの不満という3つの指標が使用されます。示されている結果が示すように、ハイブリッドBCIシステムの効率は非ハイブリッドバージョンの効率よりも高くなっています。健康な被験者の場合、3つの測定結果はすべて、混合法のスコアが非混合法のスコアよりも大幅に低いことを示しています。さらに、非ハイブリッド方式(時間34.8秒およびエラー33.9%)と比較して、重度のジスキネジアのエンドユーザーは、より低い時間平均(19.13秒)およびパーセントエラー(19.3%)を取得できます。
「シーッ!静かに小さなコマーシャルを挿入して」
BCIduino 8チャンネルEEGアンプの特定のパラメータは次のとおりです。
入力インピーダンス:1TΩ
入力バイアス電流:300pA
入力基準ノイズ:1μVpp
サンプリングレート:250 Hz / 500Hz
同相信号除去比:-110dB
調整可能なゲイン増幅係数:1、2 、
4、6、8、12、24分解能:24ビットADC、最大0.1μVの精度
消費電力:通常動作で39mW、スタンバイで最低10μW
、充電式リチウム電池で駆動し、外部干渉をさらに低減します。
サイズ:50mm * 50mm(物理測定、わずかな誤差あり)

図1 BCIduinoの物理画像

図2通常のノイズの多い環境でのBCIduinoデータ波形、中断状態、他の干渉は発生していません
図3通常のノイズの多い環境でのOpenBCI、データ波形フローティング状態(測定環境、測定時間、ソフトウェアフィルタ設定パラメータは図2BCIduinoと同じ)
管理を追加して詳細を取得する
この記事は、BCIduinoブレインコンピューターインターフェイスオープンソースコミュニティによって編成または作成されています。BCIduinoブレイン・コンピューター・インターフェース・コミュニティは、北京航空航天大学、コーネル大学、北京大学、キャピタル医科大学などの修士および医師によって開始されました。宝物を探す)